
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
221 - 240 / 573
画像レーダ装置及び信号処理装置
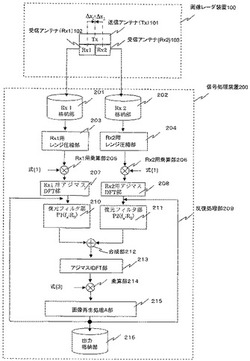
【課題】レーダの移動に伴いレーダビームの照射方向を変化させる複数ビーム観測方式を実現する画像レーダ装置及び信号処理装置を得る。
【解決手段】同一または異なるプラットフォームに送信アンテナ及び複数の受信アンテナを搭載する画像レーダ装置であって、前記送信アンテナ及び複数の受信アンテナは、レーダの移動に伴いレーダビームの指向方向を変化させながら観測する。また、送受信アンテナ間隔の2乗をレーダ波長と観測対象領域のレンジとの積の2倍で割ったものに円周率を乗じた位相を持つ複素関数が1とみなせるように、送受信アンテナ間隔、レーダ波長、観測対象領域までのレンジを設計する。
(もっと読む)
信号処理方法及び信号処理装置

【課題】パルス幅をより鋭くして高い空間分解能を得ることができる信号処理方法及び信号処理装置を提供すること。
【解決手段】信号処理方法が、周波数が時間とともに連続的に変化するチャープ信号を検出対象物に複数送信する送信工程(S01)と、検出対象物からの反射信号を受信する受信工程(S02)と、を備え、前記複数のチャープ信号が、所定の周波数帯域内で互いに異なる中心周波数を有し、それぞれ同一かつ前記周波数帯域を超えない帯域幅を備えている。
(もっと読む)
レーダ装置
【課題】所定の距離範囲の測定を短時間で処理可能なレーダ装置を提供する。
レーダ装置を提供する。
【解決手段】受信部120には、信号源として相関パルス発生源121とクロック発生源128を備えている。相関パルス発生源121で生成される相関パルス列は、パルス発生源111で生成されるパルスのパルス幅と等しいパルス幅の相関パルスを、A/Dコンバータ130でサンプリングを行うサンプリング周期Tsで複数個(L個)連続的に発生させる。また、クロック発生源128から出力されるクロック信号列は、上記の相関パルス列と同期しており、相関パルス列と同じサンプリング周期Tsでクロック信号をL個連続的に発生させる。このような構成とすることで、送信信号を1つ送出する度に、L個の異なる距離情報を取得できる。
(もっと読む)
地中レーダ装置
【課題】計測結果に含まれる不要成分を抑制して計測結果のS/N比を向上することを目的とする。
【解決手段】地中からの反射波に基づく受信信号と波源11から発生する送信信号(参照信号)との相互相関処理を行う相関処理部31と、相関処理部31から発生するパルス圧縮波信号をディジタル信号に変換するA/Dコンバータ32と、A/Dコンバータ32からのディジタル信号を時間軸上でずらす時間軸補正処理を行って元のディジタル信号に対して位相のずれたパルス圧縮波信号パターンを少なくとも1つ以上生成する時間軸補正処理部33と、A/Dコンバータ32から出力される元のパルス圧縮波信号データ及び時間軸補正処理部33で生成された位相のずれたパルス圧縮波信号データを格納するメモリ34と、メモリ34に格納した信号データを積算する積算処理部35とを備える。
(もっと読む)
目標追尾装置
【課題】複数のn次元角度センサと目標との交会角が小さな場合でも、追尾安定性を向上させた目標追尾装置を得る。
【解決手段】目標の追尾維持処理開始時の初期値算出にあたって、目標との仮説距離を用いた第1の追尾維持処理と、交会法により算出された距離を用いた第2の追尾維持処理とを並行して動作させ、それぞれの処理で目標航跡を取得しながら、それぞれの目標航跡に対する事後確率を算出し、この事後確率に基づいて2つの目標航跡を選択/統合した統合航跡を継続取得することによって目標の追尾を維持する。
(もっと読む)
目標表示装置
【課題】目標の位置精度に関する詳細な情報を得ることができる目標表示装置を提供する。
【解決手段】目標の誤差範囲境界線の倍率を設定する操作部1aと、外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、操作部で設定された倍率とに基づき、目標の誤差範囲境界線を算出する制御部2aと、制御部で算出された目標の誤差範囲境界線を表示する表示部3を備える。
(もっと読む)
レーダ装置、受信機及び相関成分検出装置
【課題】反射信号に相関成分が発生した場合であっても、目標物の探知性能を維持することが可能なレーダ装置及び相関成分検出装置を提供する。
【解決手段】相関成分検出部27−1の解析部273−1及びウェイト係数算出部274−1で、適応復調部272−1から出力される信号のSN比を最大にするウェイト係数を算出する。そして、算出されたウェイト係数を受信データ蓄積部271−1からの信号に掛け合わせ、この信号に対して適応復調部272−1でパルス圧縮を行うようにしている。これにより、反射信号におけるM系統の無線信号の信号成分の相関成分を適応復調部272−1でパルス圧縮して目標物TをCFAR275−1で検出することが可能となる。すなわち、反射信号におけるM系統の無線信号の信号成分に相関が発生している場合であっても、相関成分から目標物Tを検出することが可能となる。
(もっと読む)
追尾処理装置
【課題】追尾処理装置において、予測経路上の等高線本数に基づく簡便な方法で予測位置への移動可否を判定する。
【解決手段】開示される追尾処理装置は、観測員用端末装置等1から提供される目標の種類と位置情報をもとに、目標の位置情報と航跡の予測位置とを位置相関する相関処理部2と、現在の平滑化位置・平滑化速度を算出する平滑化処理部4と、次の目標の位置情報入力時に得られる位置を予測する予測処理部5と、監視区域の地勢情報を提供する地勢情報発生部6と、目標が予測された位置へ到達可能か否かを目標の種類ごとに判定する予測判定部8と、判定結果が到達不可能の場合に予測の変更を行う予測変更部9とを有する追尾処理装置において、地勢情報発生部から提供される監視対象領域の等高線情報に基づいて、目標の現在位置と予測位置との間の等高線密度により傾斜の度合いを算定し、算定結果に基づいて、目標が当該予測位置に到達し得るか否かを判定する。
(もっと読む)
パルス圧縮装置
【課題】少ないH/W規模で目標のパルス圧縮による距離オフセットを補正する。
【解決手段】パルス圧縮装置は、ディジタル化レーダ受信信号を複数チャンネルに分配する分配器101、既定の視線方向速度のドップラ周波数ごとに参照信号をチャンネル対応に発生する参照信号発生器104、分配された受信信号を参照信号でパルス圧縮するパルス圧縮器103、パルス圧縮器の出力信号から目標信号を検出する目標検出器105、各チャンネルの距離オフセットの補正で同一と推定した目標信号のデータを抽出する相関データ抽出器106、複数のデータを、横軸にドップラ周波数を縦軸に各チャンネルの振幅値をとったグラフ上で、各プロットのカーブフィッティングで得たグラフの近似曲線のピーク値に対応するドップラ周波数を求めるピーク検出器107、ドップラ周波数に対応する目標速度を求めパルス圧縮による距離オフセットを算出して距離補正値を求める補正値算出器108を備える。
(もっと読む)
降水分布の推定システムおよび降水分布の推定方法
【課題】降水分布を精度良く推定する構成とした降水分布の推定システムおよび降水分布の推定方法の提供。
【解決手段】降水分布の推定システム1は、MPレーダ雨量測定手段2、
MPレーダ雨量を在来型雨量格子1kmに変換する変換手段3、空間ローパスフィルタ4、補正係数付与手段(回帰分析・品質管理)5を有する。また、在来型レーダ雨量測定手段6、空間ローパスフィルタ7を有し、フィルタ処理後のデータは補正係数付与手段5に送信される。MPレーダ雨量と在来型レーダ雨量は、ダイナミック補正手段8で補正され、MP−在来型合成雨量作成手段9でMP−在来型合成雨量(MP−JMA合成雨量)を作
成する。
(もっと読む)
センサ制御装置
【課題】複数の近接目標の追尾における相関性能を向上するためのセンサ制御を行う。
【解決手段】複数センサから得られる観測値を追尾処理し目標航跡を生成する際使用センサを決定するセンサ制御装置であって、複数の相関仮説を生成しながら目標航跡と観測値の相関を決定する相関決定部11、対応付けられた観測値を用い各航跡の運動諸元を計算するフィルタ処理部12、相関決定状況からセンサ制御を実施するべきか否か判定するセンサ制御要否判定部21、センサ制御を実施するべきと判定された場合に相関決定部が生成した航跡相関行列から競合を解消すべき航跡群を抽出する競合航跡抽出部22、競合を解消すべき航跡群の誤差共分散行列よりセンサの観測方向の誤差を算出する誤差楕円重なり計算部23、算出されるセンサの観測方向の誤差に基づいてセンサの観測方向の重なりを解消するセンサの選択とセンサ使用回数の決定を行う使用センサ決定部24を備える。
(もっと読む)
三次元メモリを有する海洋レーダーシステム
【課題】航海上の標的と固定物体を自動的に識別するレーダシステムを提供する。
【解決手段】レーダーシステム10は、地理的領域を特徴づけるレーダー戻りデータを記憶装置に入れる際、操作可能であるメモリ装置20、地理的領域と関連した固定境界標識を表す一組の海図データを含むデータベース28、およびメモリ装置に結合したプロセッサ22を含む。プロセッサは、メモリ装置より少なくとも1つの地理的領域の連続スキャンに対応する複数のレーダー戻りデータセットを取得し、複数のデータセット間で相関処理を実行し、第1相関データセットを生じ、これと固定境界標識海図データ間で相関処理を実行し、第2相関データセットを生じ、第2相関データセットを処理し、固定境界標識海図データを一掃し、そこから固定境界標識ではないスキャンされた物体を表す第3データセットを生じるよう配列されている。
(もっと読む)
後方乱気流検出装置
【課題】仰角が高い場合も後方乱気流を検出できる後方乱気流検出装置を得る。
【解決手段】航空機の飛行方向に直交する方向に大気中へ光パルスを発射し、その大気からの反射光を一空間断面の信号として受信する電磁波送受信部1と、受信信号から空間断面のドップラ風速分布を算出し、ドップラ風速分布から空間断面の後方乱気流の位置を算出する信号処理部2と、空間断面の後方乱気流の位置を表示する表示部3とを備え、信号処理部2は、受信信号に基づき、処理単位毎に風速値を算出して空間断面のドップラ風速分布を算出するドップラ風速分布算出部21と、算出されたドップラ風速分布と、パラメータにより算出されたドップラ風速分布モデルとの相互相関処理から、後方乱気流を検出する検出処理部22と、相互相関処理の相関値が所定の値である空間断面の所定の位置から、空間断面の後方乱気流の位置を算出する乱気流位置算出部23とを有する。
(もっと読む)
船舶搭載用航行支援システム
【課題】他船舶を検出する2つの装置の検出結果を、1つの表示装置に見易く表示することを目的とする。
【解決手段】船舶搭載用航行支援システム10は、他船舶から送信された情報に基づいて他船舶の情報を取得する船舶自動識別装置18と、物標の検出を行うレーダ装置12とを備える。相関判定部は、船舶自動識別装置18が検出した他船舶と、レーダ装置12が検出した物標とが同一物体であるか否かの相関判定を行う。表示制御部は、設定されたモードに応じて、相関条件を満足する他船舶および物標のいずれか一方を表示装置34に表示する。判定判定部26は、船舶自動識別装置18が検出した他船舶の大きさとレーダ装置12が検出した物標の大きさとの比較に基づく判定を行う。
(もっと読む)
レーダ装置
【課題】ドップラー周波数の変化を考慮してドップラー補正を行い、超分解能測距精度の改善を図る。
【解決手段】送信周波数をステップ状に変化させた電波を生成して送信するとともに、当該電波が目標(4)で反射した反射波を受信する送受信手段(1,2,3,5,6)と、送受信手段による受信信号に基づいて、目標(4)の検出情報を目標信号として出力する目標検出処理手段(7,8,9)と、目標検出処理手段からの目標信号が入力されて、送信周波数の違いによるドップラー周波数の変化に基づいて、目標信号の位相を補正したドップラー補正信号を出力するドップラー補正処理手段(10)と、ドップラー補正処理手段からのドップラー補正信号に基づいて、目標(4)までの距離を超分解能測距する超分解能処理手段(11)とを備えている。
(もっと読む)
画像変化抽出装置
【課題】地表面に生じた物理的な変化をより高精度に抽出し、変化の空間的連続性を正しく表示する画像変化抽出装置を提供する。
【解決手段】コヒーレンスマップを対象に、ノイズ除去を行うノイズ除去部2と、ノイズ除去後の画像から特徴量抽出を行う特徴量抽出部6と、コヒーレンスマップを構成する画素のコヒーレンスの時間的、空間的平均値を算出するコヒーレンス平均算出部3と、コヒーレンスマップの時系列変化情報を用いて、変化抽出を行う変化抽出部4と、変化の発生時刻のずれを検出し、時刻調整を行う変化時刻調整部5と、変化選別を行い変化選別後の変化選別画像データを全体の出力とする変化選別部7とを備える。
(もっと読む)
位置情報検出装置および位置情報検出方法
【課題】測定対象物に電磁波を照射することにより測定対象物からの反射波を受信して信号処理を行い、測定対象物の位置情報を求めるとき、簡易な装置構成で、高速で信号処理を行う。
【解決手段】2M−1(Mは自然数)の符号長さの符号化系列の信号の電磁波を測定対象物に照射し、そのときの反射信号と符号化系列の信号との相互相関関数を算出することにより、測定対象物の位置情報を求める。そのとき、幅×深さが2K×2L(K及びLは自然数)のサイズの2次元のメモリを用い、このメモリに、符号化系列の信号の値が、1つの符号化系列を1単位として複数単位記憶されている。このメモリの深さ方向のアドレス位置が呼び出し開始位置として指定されて、上記値がメモリの幅方向の順番に沿って呼び出され、照射する電磁波の符号化系列の信号が生成される。メモリ容量2K+Lは、(2M−1)・N+N(Nは自然数)である。
(もっと読む)
目標追尾装置
【課題】多次元相関決定時の演算負荷の減少を実現しかつ許容可能な解を導出する目標追尾装置を得る。
【解決手段】センサ観測値を入力情報とする航跡候補コスト行列生成手段110Aと、航跡分離状況判定手段130と、多次元相関決定手段120とを備えている。航跡候補コスト行列生成手段110Aは、航跡候補行列と、航跡候補の各々に対応するコストからなるコスト配列とを生成する。航跡分離状況判定手段130は、航跡が分離していると判定された場合には、航跡候補コスト行列生成手段110Aに対し、航跡候補行列と航跡候補の各々とに対応するコストからなるコスト配列を再生成するように指示する。多次元相関決定手段120は、航跡候補行列とコスト配列とからLagrange緩和法を用いて、N+1次元割当問題を2次元割当問題の繰り返しとして解くことにより、最適航跡組み合わせを抽出する。
(もっと読む)
電波類別探知装置
【課題】個々の電波諸元では捉えることの難しい電波を識別可能にする。
【解決手段】偏波の異なる複数の素子で構成された空中線で受信された複数の電波送信源からの受信信号を、それぞれデータ番号、受信時刻および各種諸元が付与された離散データに変換するA/D変換手段3と、変換された離散データを信号データリストにして一時保存する一次記録手段4と、信号データリストから各電波諸元に基づいて信号データを抽出し、電波諸元毎の信号データグループを作成する諸元検出手段5と、異なる電波諸元間の信号データグループで構成データを比較し、構成データの合致度に基づいて特定の電波送信源による信号データグループを算出する相関処理手段6を備える。
(もっと読む)
地中レーダ
【課題】地中の掘削作業に先立って埋設状況を調査する際に、埋設物の位置を探知するだけでなく、地中の埋設物が金属物体か非金属物体かを識別可能とする地中レーダ。
【解決手段】地中に向けて電磁波を送出する電磁波送信部4と、送出された該電磁波に基づいて反射された電磁波を受信する電磁波受信部5とを有し、該電磁波受信部5によって受信された電磁波に基づき地中に埋設された埋設物9を探知する地中レーダ1において、前記電磁波受信部5で受信された電磁波の受信波形19と前記電磁波送信部4から送出される電磁波の送信波形12との相互相関処理、及び該受信波形19の自己相関処理を行う相関処理部22と、前記相関処理部22により得られる相互相関値と自己相関値との比率を算出し、算出した該比率に基づいて前記地中に埋設された埋設物9が金属物体であるか非金属物体であるかを識別する識別部7とを備えた構成とした。
(もっと読む)
221 - 240 / 573
[ Back to top ]