
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
261 - 280 / 573
分散スペクトル検知
本発明は、ラジオネットワークに関するスペクトルセンシングスキームに関する。提案されるアプローチは、信号スペクトルの評価を得るために、分散された形態でセンシングを適用することを含む。複数のセンシングノード(200−1乃至200−J)のネットワークは、関心のある大きい帯域幅に対処するための高速アナログデジタル変換器を必要とすることなく、このようなスペクトル評価を得る。 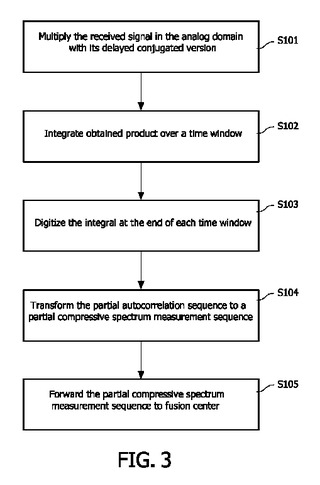 (もっと読む)
(もっと読む)
無線タグ距離測定装置
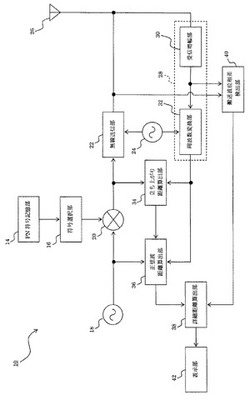
【課題】無線タグ距離測定システムにおいて、複数の無線タグから送信される応答信号の干渉を回避すること、および距離測定精度を向上させることを目的とする。
【解決手段】無線タグ距離測定装置10は、距離測定対象の無線タグの固有割り当てPN符号に応じて値が変化するPN信号を生成し、さらにPN信号に基準正弦波信号を乗じた正弦波PN信号を生成する。そして、正弦波PN信号を無線信号に変換した拡散パルス変調信号を送信する。無線タグ距離測定装置10は、無線タグによって拡散パルス変調信号に対して時間圧縮処理が施された圧縮パルス変調信号を受信する。無線タグ距離測定装置10は、正弦波PN信号を生成する元となった基準正弦波信号と、受信した圧縮パルス変調信号に含まれる基準正弦波信号との位相差に基づいて、無線タグまでの距離を算出する
(もっと読む)
合成開口レーダ装置

【課題】 マルチチャンネルを有した受信系を簡略化し、発生データレート及びデータ量の抑制を可能とした合成開口レーダ装置を得ることを目的とする。
【解決手段】 複数のアンテナと、前記それぞれのアンテナの受信信号毎に異なるパルス間位相変調を施す移相器と、前記移相器によりパルス間位相変調を施したそれぞれの受信信号を合成する合成回路と、前記合成回路により合成された受信信号に対し、前記パルス間位相変調系列毎の逆相データをそれぞれ掛け合わせることにより復調処理する複数の復調器と、前記復調器により復調された信号について、それぞれ異なる画像化処理を行う複数の画像化処理装置とを備える。
(もっと読む)
レーダ画像処理装置
【課題】スクイント角を含む記録データに対しても、画像再生過程においてレンジ方向のリサンプリングを実行し、高精度なレーダ画像のレジストレーションを実現することができるレーダ画像処理装置を提供する。
【解決手段】観測対象に対して異なる複数の方向から送信され、観測対象で反射されたレーダビームを受信して得られた記録データに基づいて、レーダ画像を再生するレーダ画像処理装置であって、画像再生過程において、記録データに対して、レンジ方向のサンプリング間隔の伸縮変更を実行するとともに、観測時のスクイント角に対応するドップラー中心周波数のオフセット補正を実行する画像再生部2を備えたものである。
(もっと読む)
レーダ装置
【課題】MUSIC法やEsprit法などによって到来波数の推定を行うレーダ装置において、精度良く到来波数の推定が行えるようにする。
【解決手段】到来波数推定処理の際に、雑音を考慮したスレッショルドλTHを設定し、このスレッショルドλTHに基づいて到来波の固有値λが信号空間の固有値λ1〜λLか雑音空間の固有値λL+1〜λKかを分別する。これにより、雑音を考慮に入れた上で、信号空間の固有値の数から到来波の数を正確に推定することができる。
(もっと読む)
レーダ装置制御方法、レーダ装置、移動体および送受信装置
【課題】他の移動体の相対向きを算出することができるレーダ装置制御方法、レーダ装置、移動体および送受信装置を提供すること。
【解決手段】移動体の所定の位置に設置された複数の送受信部が、移動体番号と設置位置番号とを含む信号を送信し、他の移動体に設置された複数の送受信部から送信される信号を受信した場合に、信号を受信した受信部、信号を送信した他の移動体、信号を送信した送信部が設置されている位置を特定することにより、他の移動体の相対向きを算出する。
(もっと読む)
パッシブコヒーレント探索アプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法
【課題】PCLアプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法を提供する。
【解決手段】信号を受信し、変換,チャネル歪みの補償,復調し、複素数を形成する。また、復調信号から基準信号および目標物信号を推定する。この目標物信号内の基準信号の一部を減らすため、基準信号は、目標物信号に関して適応的にフィルタリングし、目標物信号と結合して、基準信号の一部を減らす。目標物信号および基準信号に対して逆変換オペレーションを実施し、出力目標物信号について、複数の目標物ビームを形成する。複数の目標物ビームのそれぞれについて、間引きした複数のラグ積を形成する。基準信号について、間引きした複数のラグ積を形成する。複数の目標物ビームのそれぞれについてクロスアンビギュイティ関数を推定する。基準信号についての上記間引きした複数のラグ積を用いて、基準信号についてオートアンビギュイティ関数を推定する。
(もっと読む)
レーダ装置
【課題】パルス圧縮を利用したレーダ装置においてレンジサイドローブを本来的に発生しないようにする。
【解決手段】送信波形信号を格納するメモリ12と、該メモリ12から送信波形信号を読み出す波形読み出し部14と、送信波形信号をD/A変換してアナログ送信信号に変換するD/Aコンバータ16と、送信信号を増幅する半導体アンプ18と、増幅された送信信号を送信波として放射すると共に送信波の反射波を受信するアンテナ20と、受信波をA/D変換して受信波形信号に変換するA/Dコンバータ24と、受信波形信号と参照波形信号との相関を演算してパルス圧縮波形信号を求めるパルス圧縮部26と、を備え、チャープ波を用いて送信波を送信し、送信波の波形は、そのパワースペクトル密度が基本的にガウス関数を示すものであり、送信波の反射波を受信してその受信信号をパルス圧縮してパルス圧縮信号を生成する。
(もっと読む)
レーダ装置
【課題】MUSIC法を用いた方位推定に際し、不等間隔アレーアンテナを採用することによって生じる非所望ピークの影響を抑え、高精度に物標方位を推定可能にすること。
【解決手段】レーダ装置は、受信信号に基づき自己相関行列を算出すると共に(S110)、当該行列の固有値を求め(S120)、閾値より大きい固有値の数から到来波数Mを推定する(S130)。また、各固有値に対応する固有ベクトルを用いて、MUSICスペクトルを算出し(S160)、MUSICスペクトルから、推定した到来波数Mより所定量α多い数のピークを抽出する。そして、各ピークに対応する方位を、検査対象方位に設定する(S170)。そして、検査対象方位のステアリングベクトル間の相関を、高低の二段階で判定し、相関が高い場合には、電力推定対象に設定する方位の数M’を、M+αに設定し、相関が低い場合には、数M’を、推定した到来波数Mに設定する。
(もっと読む)
レーダ装置
【課題】目標が複数存在し、目標の距離と角度のペアが不明な状況下でも、誤ったペアによる偽目標を排除し、正しいペアリング結果を出力可能なレーダ装置を得る。
【解決手段】距離・角度観測値を生成する距離・角度観測値検出部1と、複数の仮説を生成する仮設生成部4と、初期の距離・角度観測値を生成する初期状態量設定部5と、予測値と観測値との相関処理結果に基づいて、相関のとれた距離・角度観測値を選抜する相関処理部7と、観測値に基づいて予測値を算出する追尾フィルタ部8と、仮説の対数尤度を算出し、全サンプルの仮説の対数尤度の和およびサンプル数を算出する対数尤度算出部9と、サンプル数が所定の閾値以上である場合に仮説毎の対数尤度の和を出力するサンプル数判定部11と、信頼度が最大となる仮説に含まれる距離と角度のペアをペアリング結果として出力する最大信頼度仮説判定部12とを備える。
(もっと読む)
多目標追尾装置
【課題】追尾性能が高く、しかも操作性に優れた小型化可能な多目標追尾装置を提供する。
【解決手段】外部から入力される目標の観測値を用いて複数の目標を追尾する多目標追尾装置において、各目標の状態変数を表す値または相関ゲート内の観測値数の少なくとも1つに基づいて、目標毎に、複数種類の追尾フィルタのいずれを選択するかを判定し、該判定結果に応じた制御信号を生成する追尾フィルタ選択部5と、追尾フィルタ選択部で生成された制御信号によって示される追尾フィルタを実現するための処理を、目標毎に、実行する追尾フィルタ処理部1aおよび3aを備える。
(もっと読む)
測位システム及び処理装置
【課題】電波の見通し環境が得られない空間において、センサ、無線タグ、通信端末装置等が取り付けられていない移動物体の位置を測定する。
【解決手段】処理装置は、端末装置が取り付けられた第1の移動物体による受信波形の第1の解析結果と前記端末装置の位置とを対応付けてデータベース装置に記録し、端末装置等が取り付けられていない第2の移動物体による受信波形を得た場合は、該受信波形の第2の解析結果とデータベース装置に記録された第1の解析結果とを比較し、該当する結果を得た場合の端末装置の位置を第2の移動物体の位置として出力する。
(もっと読む)
物標検出装置
【課題】アンテナ素子数を増加させることなく、静止した複数物標の検出性能を向上させる。
【解決手段】FMCW波の送受信動作を必要なスナップショットの必要数だけ繰り返すと共に、送受信動作毎に、FMCW波の中心周波数を変化させる(S110〜S130)。送受信動作(スナップショットSSi,i=1〜4)毎に、ビート信号データをFFT処理することで周波数スペクトラムを求め、その周波数スペクトラム上でピークとなる対象周波数kのデータx1(k)〜xN(k)を、全受信チャンネルCH1〜CHNから抽出し,配列した受信ベクトルXi(k)を生成し、受信ベクトルXi(k)のそれぞれについて相関行列Rxx_ssi(k)を求める。更に、相関行列Rxx_ssi(k)を、対象周波数k毎に平均(時間平均)した平均相関行列HRxx(k)を算出し、平均相関行列HRxx(k)から求めたMUSICスペクトラムにより、物標が存在する方位を求める(S140〜S180)。
(もっと読む)
波数推定装置
【課題】従来の波数推定装置では、目標の固有値と雑音の固有値との差が小さくなる低SNRの場合、誤った波数推定を行う問題があった。
【解決手段】目標からの反射信号を、アンテナのビーム指向方向に高利得を得るようビーム合成して、ビーム合成信号をパルス間積分し、パルス間積分信号から目標信号が検出された場合、目標からの反射信号の相関行列を相関行列算出手段で算出し、固有値・固有ベクトル算出手段で固有値・固有ベクトルを算出し、この固有ベクトルにより固有ビーム形成手段でビーム形成して、ビーム形成出力に対しコヒーレント積分手段がコヒーレント積分を行い、コヒーレント積分値を所定の基準で抽出して、波数推定手段で波数を推定する。
(もっと読む)
レーダ装置
【課題】従来のビート周波数の対応付け方法では、目標の探知状況がアップチャープ時とダウンチャープ時で異なりビート周波数のピーク数が合わない場合においては、ビート周波数の対応付けが正確に行えない状況が発生する。
【解決手段】FMCW信号を送信する送信手段1と、受信信号と送信信号とからビート信号を生成する受信手段2と、ビート信号のビート周波数分布を求めるビート周波数生成手段3と、ビート周波数の追尾処理を行うアップチャープ用ビート周波数追尾手段4とダウンチャープ用ビート周波数追尾手段5と、ビート周波数時系列データから目標の距離及び距離変化率を算出するアップチャープ用目標検出手段6とダウンチャープ用目標検出手段7とを設けた。
(もっと読む)
目標追尾装置および目標追尾方法
【課題】ウェイティングによる信号レベルの劣化を防ぐことができる目標追尾装置を提供する。
【解決手段】目標の信号を検出する目標検出器10と、目標検出器10により検出した信号に対してレーダー装置のレンジサイドローブパターンからレンジサイドローブとの相関の程度を計算し、レンジサイドローブ相関処理の相関計算結果から重み付け計算によって目標検出器10により検出した信号に対し重み付けを行い、重み付け計算の結果を考慮したMHT(Multiple Hypothesis Tracking)により追尾処理を行う追尾処理器20と、追尾処理器20の結果を表示するための航跡表示器30を備える。
(もっと読む)
画像レーダ装置
【課題】目標の相対運動と3次元形状を推定することのできる画像レーダ装置を得る。
【解決手段】目標に対して送信電波を照射するための送信機1及び送受信アンテナ3と、前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用補助アンテナ4,5および受信機6〜8と、前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部9と、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段11とを備える。
(もっと読む)
無線測距システム及び無線測距方法
【課題】複数の基地局間のクロック同期、及び、基地局間の位置関係の入力を必要とすることなく、基地局と端末との距離を測定すること。
【解決手段】クロック移相部210は、送信パルスの発生に用いたクロックを100ナノ秒毎に特定の移相量でシフトして、AD変換部211は、シフトしたクロックを用いて、端末103から再放射された信号をデジタル信号に変換する。相関演算部212は、デジタル信号と送信パルスとの相関演算を行い、シフトした位相におけるデジタル信号を同じ位相毎に加算して得られる遅延プロファイルを形成し、到来波検出部213は、遅延プロファイルにおいてパルスのピークを検出する。距離算出部214は、パルスを送信したタイミングとパルスのピークを検出したタイミングとに基づいて、端末103までの距離を算出する。
(もっと読む)
物体検出装置
【課題】複数の移動物体が近接している場合であっても、各移動物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、粗決定サーチ関数及び精決定サーチ関数に基づいて、移動物体毎に対応する遅延時間を特定できるか否かの判定を行う時間判定部106と、ステレオカメラ23を介して、複数の移動物体を含む画像を取得する画像取得部108と、遅延時間を特定できないと判定された場合に、取得された画像に基づいて、遅延時間を特定できないと判定された移動物体である特定困難物体に対応する粗決定サーチ関数及び精決定サーチ関数を補正する関数補正部112と、補正された粗決定サーチ関数及び精決定サーチ関数に基づいて、特定困難物体に対応する遅延時間を特定する遅延時間特定部113と、特定された遅延時間に基づいて、特定困難物体との距離を求める距離算出部114と、を備える。
(もっと読む)
レーダーに用いることを含む、アンテナ符号化発射・受信方法及び装置
レーダーセルを小さくし、レーダーシステム、特にHFSWRの検知を向上させる。一斉送信システムSEMは、2つずつ直交しており、かつ、各々が時間的にシフトすることで自身に直交する基本信号を一斉送信して、送信放射パターンを形成することができ、各放射パターンは、二次ローブと交互となるメイン放射ローブLP1、LPNを含み、基本信号と関連するメインローブは、空間において実質的に並置されている。受信システムSREは、受信区域に含まれるセルCESn,mと同数の受信パターンを監視受信区域に形成することができ、前記セルは、送信放射チャートの1つのメイン放射ローブによりカバーされており、かつ、一斉送信システム及び受信システムから所定のバイスタティック距離に位置している。 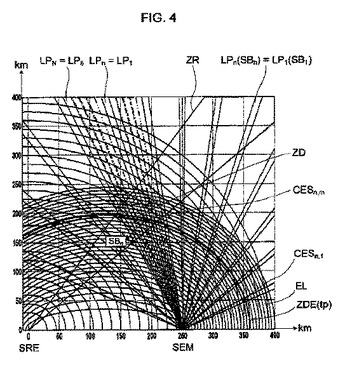 (もっと読む)
(もっと読む)
261 - 280 / 573
[ Back to top ]