
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
561 - 573 / 573
強化された監視被写体撮像
撮像システム(30)が、被写体位置(46)における被写体(32)に向けてミリ波電磁放射線を送信し、その被写体(32)からミリ波電磁放射線を受信するように構成されたアンテナ装置(48)を含む。コントローラ(62)は、アンテナ装置(48)を操作し、受信された放射線を表す出力(68)を生成するように構成されたトランシーバ(64)と、トランシーバ出力(68)から、被写体(32)の画像(130)を表す画像データを生成するように適合されたプロセッサ(70)とを含む。アンテナ装置(48)によって受信された放射線を表す画像信号の少なくとも第1の部分を使用して、被写体(32)の少なくとも一部分の第1の画像(130)を表す第1の画像データが生成される。第1の画像(130)の解像度とは異なる解像度を有する第2の画像(132)を表す第2の画像データが、画像信号の少なくとも第2の部分から生成される。  (もっと読む)
(もっと読む)
複数の情報源を有する監視ポータル
監視システム(20)は、被写体(32)を撮像するためのミリメートル波の電磁放射を用いて、人物(36)と、その人物(36)によって携行されている物体(38)とを含む被写体(32)を検問するように構成されている第1のセンサ装置(26)を含むことができる。補助情報源(30)が、人物(36)によって携行されている可能性のある物体(36)に関係付けることができる被写体(32)に関するさらなる情報を提供する。関係情報が、生成された画像信号(125)と被写体情報とを関係付ける。補助情報源(30)は、被写体位置(34)の人物(36)によって携行されている可能性のある物体(38)の所与の特性を検出するように適合されている第2のセンサ装置(26)とすることができる。次いで、所与の特性を有する物体(38)を人物(36)が携行しているかどうかに関する関係情報を生成することができる。 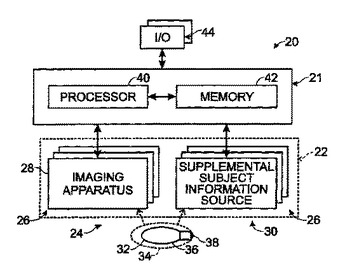 (もっと読む)
(もっと読む)
物体識別をともなう監視される被写体の撮像
撮像システム(30)が、被写体位置(46)における被写体(32)に向けてミリ波電磁放射線を送信し、その被写体(32)からミリ波電磁放射線を受信するように構成されたアンテナ装置(48)を含む。コントローラ(62)は、アンテナ装置(48)を操作し、受信された放射線を表す出力(68)を生成するように構成されたトランシーバ(64)と、トランシーバ出力(68)から、被写体(32)の画像(130)を表す画像データを生成するように適合されたプロセッサ(70)とを含むことが可能である。アンテナ装置(48)によって受信された放射線を表す画像信号の少なくとも第1の部分を使用して、被写体(32)の少なくとも一部分の第1の画像(130)を表す第1の画像データが生成される。第1の画像(130)の解像度とは異なる解像度を有する第2の画像(132)を表す第2の画像データが、画像信号の少なくとも第2の部分から生成される。 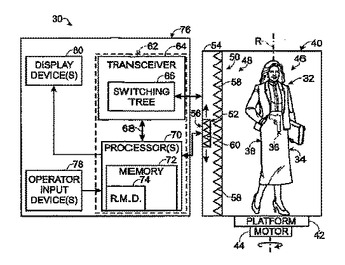 (もっと読む)
(もっと読む)
RFタグ用2−Dレンジホッピングスペクトラム拡散符号器/復号器システム
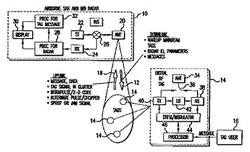
空中レーダーが友好的な車両上のタグに問いかけを行う。このタグは、レーダーからのダウンリンク信号によって問いかけられると、敵の検知及び利用を避けるように雑音のように見える非常に低いレベルのアップリンクメッセージを返信する。これは、レーダーから送信された1つおきのパルスの位相シフトされた、遅延されたバージョンを再送信することによって達成される。デジタルRFタグは、レーダーからの1つおきのパルスを捕捉し、1つおきの介在パルス時に擬似ランダム遅延(レンジホップ)及び擬似ランダム位相(方向)を含むデジタル符号化スペクトラム拡散パルスをレーダーに送信する。 (もっと読む)
レーダ装置
送信部は、所定幅のトリガパルスによってパルス変調された所定の周波数を有するレーダ波を探査対象空間に発射する。受信部は、前記レーダ波の反射波を受信して受信信号を出力する。ローカルパルス発生部は、遅延部によって遅延された前記トリガパルスによってパルス変調された前記所定の周波数を有するローカルパルス信号を出力する。相関値検出部は、前記受信信号とローカルパルス信号との強度についての相関値を検出する。遅延時間可変部は、前記遅延時間を、前記トリガパルスの発生周期である前記所定周期の範囲内で順次変化させる。相関値記憶部は、可変される遅延時間毎に検出される前記相関値を記憶する。度数分布作成部は、記憶された相関値の前記遅延時間に対する度数分布を作成する。探査制御部は、作成された度数分布に基づいて、前記探査対象空間についての解析を行う。 (もっと読む)
線形サブアンテナによって構成される十字アンテナおよび一連の処理
本発明は、線形サブアンテナを含む十字アンテナ及びその一連の処理に関するものである。特に、本発明は、第1及び第2線形部を形成し、基本信号(Si´,Gj´)を生成するセンサ(21−2M,31−3N)を備え、第1及び第2線形部のそれぞれの中間点に接する、第1及び第2のそれぞれの接線方向ベクトル間の角度が、30°から150°の間の角度である第1(2)及び第2(3)線形サブアンテナと、結合信号(VSi,VGj)を形成するアンテナ処理装置(4,5)と、有用な結合信号(TSi,TGj)を生成する信号処理装置(6,7)と、有用な結合信号間の相関係数([Cij])を算出する装置(8)と、相関係数が閾値を超える場合に、検出信号([Rij])を生成する装置(8)とを有するアンテナ(1)に関するものである。本発明は、例えば、同等の性能レベルのためのいくつかのセンサを有するアンテナを得るために用いることができる。 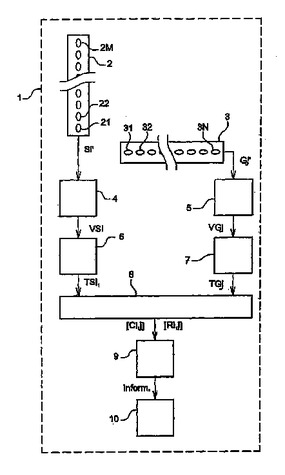 (もっと読む)
(もっと読む)
波形のシーケンスの生成
主シンボルシーケンスを生成し、シーケンス内の各シンボルをランダムに選択された波形に置き換えることにより、波形のシーケンスを生成する。主シンボルシーケンスは、狭い自己相関関数を有し、パルスの列であってもよく、それらパルスは、所定の構成のパケット内に配置される。波形を送信し、送信波形の表現を形成し且つその表現を遅延させ、その表現を、送信波形の反射の結果として受信される信号と相関させることにより、物体を検出することができる。 (もっと読む)
時間領域のインパルス状の信号に基づく物体の高速な検出装置及び方法
超広帯域(UWB)RF信号を用いてターゲット領域における関心物体を検出するための方法及びシステムが開示されている。トランスミッタとアンテナアレイは、関心物体を含んでいるかもしれないターゲット領域を探査するために用いられる、超広帯域RFインパルス状信号を生成する。アンテナと信号処理手段は、ターゲット領域からの応答信号を受信し、一群の座標を生成するために応答信号を処理する。応答信号と既知の物体との間に対応が存在するか否かを決定するために、処理された応答信号の座標は、既存のデータベースにおける既知の物体の座標と比較さる。対応を示すものが存在する場合、既知の物体の存在が、システムのオペレータへ表示される。 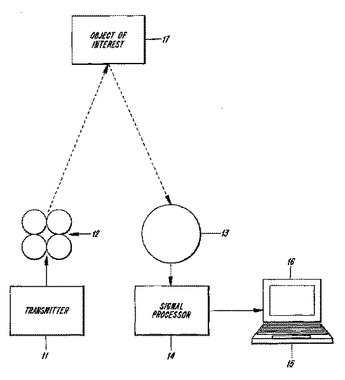 (もっと読む)
(もっと読む)
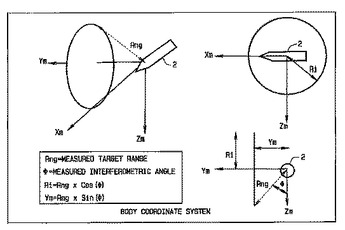
レーダ戻りデータを重み付ける方法および装置
前記レーダターゲット(48)の位置を決定することにおいて位相レーダエコーからの加算による地勢エコーフェーディングの影響を減少する方法が提供される。この方法は、レーダターゲットの地勢特徴から生じるレーダエコーフェーディングの程度に比例する、干渉角Φへ寄与する地勢特徴の影響を調整することにより、少なくともひとつのレーダエコーに基づきレーダターゲットへの干渉角Φを決定するステップと、干渉角Φをフィルタリングするステップとを含む。訂正された干渉角Φは、フィルタリングの少なくとも一部に基づいて提供される。
 (もっと読む)
(もっと読む)
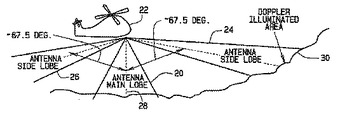
前方測距能力を備えたレーダ高度計
レーダ高度計(50)に前方測距法を持たせる方法が記載される。この方法では、レーダ信号の副ローブ(24)がアンテナから前方に放射されるように高度計のアンテナを配置し、副ローブのレーダエコーを処理して前方対象物(30)までの距離を決定する。
 (もっと読む)
(もっと読む)
レーダ装置及び遅延時間測定方法

【課題】 通常の変換能力を有したA/D変換器等を利用して、距離分解能を向上する。
【解決手段】 カオスコード発生部30が出力する周期f/nのカオス信号から、遅延回路31が(k−1)/(2f)だけ基準の時点(基準点)から遅延させて、ずらしながらn個取り出し、これにより搬送波を変調してn個の信号波を生成し、対象物に放射し、対象物で反射して受信されたn個の反射波からn個のベースバンド信号を得て、これをそれぞれ周期2f/nでA/D変換器44がディジタル信号に変換し、その周期に合わせてn個のディジタル信号を合成し、疑似的な周波数fのカオス信号に対応するベースバンド信号を生成する。同様に、遅延回路31が出力するn個のカオス信号から周波数fの疑似的なカオス信号を生成し、ベースバンド信号に基づくディジタル信号と、当該疑似的なカオス信号に基づくディジタル信号との相関演算により、反射波の遅延時間を測定。
(もっと読む)
レーダシステムおよびレーダ信号処理装置
【課題】取得した画像データから水面の状態に関するデータを得るための処理を自動化し、これにより省力化および処理の高速化を図る。
【解決手段】アンテナ1、送受信部2、信号処理部3よりなるSARによりSAR画像データを取得する。また記憶部5に、水面の波がとり得る状態のイメージデータに波の向きを示すベクトル(矢印)およびその波長を対応付けたテンプレートデータベース5aを記憶しておく。そして、相関処理部4により、SAR画像データを複数の区域に分割してそれぞれテンプレートとの相関を取り、相関値の最も高いテンプレートに対応付けられた波の向きと波長とを記憶部5から読み出す。またこの読み出したデータをもとに、演算部6で最適進入コースを算出するようにした。
(もっと読む)
エコー照合装置
【課題】 基準エコーマップと観測エコーマップの基準原点がオフセット誤差を持つ場合でもエコー照合時の誤照合を少なくする。
【解決手段】 重心追尾手段1は、捜索レーダからの目標群の位置情報をもとに、目標群の重心推定位置と重心推定速度を求め、基準エコーマップ作成手段2は、目標群の位置情報をもとに基準エコーマップを作成する。エコーマップ補正手段3は、別レーダから得られた観測エコーマップと、重心推定速度と、基準エコーマップを入力し、観測エコーマップの位置補正を行い、相関手段4は基準エコーマップの基準エコーと観測エコーマップの観測エコーの対応付けを行う。
(もっと読む)
561 - 573 / 573
[ Back to top ]