
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
121 - 140 / 573
拡張スキッタ受信装置
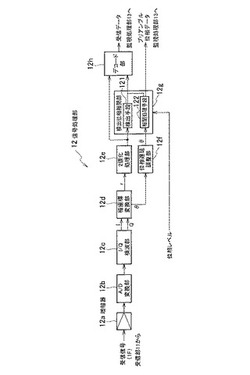
【課題】誤検出による拡張スキッタの検出率の低下を防止する。
【解決手段】受信信号を特定する振幅値のデータを2値化して、2値化データとして出力する2値化処理手段12eと、2値化データを入力すると、当該2値化データから拡張スキッタのプリアンブルを特定する所定のパルスパターンの有無を検出する検出手段121と、受信信号を特定する位相値のデータを入力すると、当該位相データから拡張スキッタのプリアンブルを構成するパルスの相関性の有無を判定する相関処理手段122と、検出手段で所定のパルスパターンが有と判定されるとともに、相関処理手段で相関性が有と判定されると、2値化データをデコードして拡張スキッタとするデコード手段12hとを備える。
(もっと読む)
角速度推定装置及びコンピュータプログラム及び角速度推定方法

【課題】移動体の角速度を精度よく推定する。
【解決手段】周辺物体観測装置811(レーダ)は、移動体の周辺に存在する物体について、移動体を基準とした物体の相対位置を繰り返し観測する。相対位置取得部211は、周辺物体観測装置811が観測した観測結果を取得する。静止物体判定部220(停止物識別部)は、周辺物体観測装置811が相対位置を観測した物体が静止しているか否かを判定する。物体相関部230(停止物用追尾部)は、周辺物体観測装置811が観測した複数の相対位置のなかから、同一の物体について周辺物体観測装置811が観測した複数の相対位置を判定する。角速度推定部(状態推定部240、軌道推定部)は、移動体の角速度を推定する。
(もっと読む)
拡張現実のためのブロードバンドパッシブ追跡
それぞれが周囲の放送ソースからの電磁波(たとえば、無線周波数「RF」信号)を感知する能力を有するいくつかのパッシブ受信機を使用することができるブロードバンドパッシブセンシングおよび追跡システムに関する技術が、全般的に説明される。各パッシブ受信機は、1つまたは複数のアンテナによって感知するように構成され得る。異なる位置の複数の受信機が、関心のあるシーンの協調した追跡を行うように構成されたブロードバンドセンシングネットワークを形成するために利用され得る。一部の例によれば、ビームフォーミングアルゴリズムが、物体を測位および追跡するためにパッシブ受信機によって形成されたアンテナアレーを利用するブロードバンドセンシングネットワークに適用され得る。 (もっと読む)
エコー信号処理装置、レーダ装置、エコー信号処理プログラム及びエコー信号処理方法
【課題】簡単な構成で、物標追尾等の処理で用いることができる有用な情報を取得することが可能な信号処理装置を提供する。
【解決手段】信号処理装置3は、スキャン相関処理部33と、物標状態判別部38と、を備える。スキャン相関処理部33は、第1の時刻に受信された第1エコー信号のレベルと、前記第1の時刻よりも前の第2の時刻に受信された第2エコー信号のレベルと、に基づいて、第1の時刻におけるスキャン相関信号レベルを出力する。物標状態判別部38は、第1エコー信号のレベルと、第1の時刻におけるスキャン相関信号レベルと、に基づいて、第1エコー信号に対応した物標の状態を判別する。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】検出精度を低減させることなく、高い精度で受信波の到来方向の検出を行う電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】周波数分解処理部22は、送信波及びターゲットから到来する受信波からビート信号に基づいた複素数データを算出する。ターゲット検知部31は、ビート周波数の強度値からピーク値を検出してターゲットの存在を検知する。ターゲット連結処理部32は、現在及び過去の検知サイクルにおいて検出される前記ターゲットを関連付ける。方位検出部30は、複素数データに基づく生成複素数データを、データ生成手段に対応させて生成し、アンテナ毎に、ターゲットの存在が検知されたビート周波数の複素数データ、及び、生成複素数データを用いてそれぞれ作成された正規方程式に基づいて受信波の到来方向を算出する。
(もっと読む)
パッシブレーダシステムおよびパッシブレーダ方法
【課題】長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高める。
【解決手段】散乱波を受信して時系列データを生成する第1の受信系と、直接波を受信して時系列データを生成する第2の受信系と、両時系列データに基づく相互相関を演算し、移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定する相互相関演算手段(16)と、観測情報と測角値情報とを用いて、移動目標の位置を得る目標標定手段(17)とを備えるパッシブレーダ装置(10)を異なる位置に複数台配置し、各パッシブレーダ装置は、相互の観測情報を送受信する通信手段(18)と、すべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、移動目標の瞬時速度ベクトルを推定する瞬時速度ベクトル推定手段(19)とをさらに備える。
(もっと読む)
位相と振幅の相関関係を使用したモード5検出処理
【課題】受信レーダ信号の位相と振幅との相関関係を有する改良されたモード5の航空管制システムを提供する。
【解決手段】モード5の航空管制システム20の受信機22は、振幅と位相信号出力を提供し、航空機から送信されるデータからのプレアンブルとフライト情報を含むデジタルデータストリームを提供する。信号スプリッタ24は、振幅と位相信号出力を、奇数番号のパルスと偶数番号のパルスを送信するそれぞれ奇数チャンネル26と、偶数チャンネル28の間で分割する。プレアンブル相関器38は、奇数と偶数データストリームと規定のプレアンブルマスクとの相関を取り、妥当可能性のあるプレアンブルを検出して、プレアンブル決定論理回路48は、プレアンブル相関器38から出力された信号を処理して、どのプレアンブルが実際に有効であるのか識別する。
(もっと読む)
移動体周辺監視システム
【課題】送信波を放射することにより障害物を検知する複数の検知センサを備えた移動体周辺監視システムにおいて、各検知センサ間の干渉を抑制し、検知精度の向上を図る。
【解決手段】各検知センサ2は、信号源20の発振周波数を掃引する周波数制御回路21と、上記発振周波数と同じ周波数の送信波を放射する送受信回路22と、電源制御回路24とを備える。電源制御回路24は、上記発振周波数が掃引される期間だけ、上記送信出力をオンし、他の期間は、上記送信出力をオフする。従って、いずれかの検知センサ2で上記発振周波数が掃引され上記送信出力がオンであるときに、他の検知センサ2で上記発振周波数が掃引されていなければ、他の検知センサの上記送信出力はオフされている。このため、各検知センサ2の送信波又は反射波と他の検知センサの送信波又は反射波との間の干渉の発生を防ぐことができ、検知センサ2の検知精度の向上を図ることができる。
(もっと読む)
移動体周辺監視システム
【課題】複数の距離測定センサを備えた移動体周辺監視システムにおいて、各距離測定セ
ンサにより高精度に障害物までの距離を測定し、しかも、製造コストを低減する。
【解決手段】移動体周辺監視システムにおいて、センサ制御装置は、各距離測定センサに
よる距離測定範囲に対応した周波数掃引幅の掃引パターンを記憶している。センサ制御装
置は、各距離測定センサに、その取付位置に応じて距離測定範囲を設定し、その距離測定
範囲に対応する周波数掃引幅の掃引パターンP1、P2、P3に従ってセンサ内の信号源
の発振周波数を掃引させる。これにより、各距離測定センサの取付位置に応じた夫々の距
離測定範囲で各距離測定センサにより高精度に距離を測定することができる。しかも、上
記掃引パターンはセンサ制御装置が記憶しているので、各距離測定センサはその構成を共
通化することができる。
(もっと読む)
追尾装置
【課題】大目標と小目標との観測値の取り合いによる追尾性能の劣化を回避し、高精度の航跡を生成可能な追尾装置を得る。
【解決手段】センサ10と、位置相関マトリクスを生成する位置相関処理部20と、セル数相関マトリクスを生成するセル数相関処理部30と、位置相関マトリクスおよびセル数相関マトリクスを用いて相関調停結果を生成する相関調停処理部40と、相関調停結果を用いて観測値クラスタを生成する位置クラスタリング処理部50と、統合セル数観測値を監視する統合セル数観測値監視処理部 60と、カルマンフィルタにより統合セル数推定値および更新後の統合セル数予測値を生成する統合セル数更新予測処理部70と、カルマンフィルタにより航跡の位置速度予測値および位置速度推定値を生成する位置速度更新予測処理部80と、遅延処理部90と、表示処理部100と、を備える。
(もっと読む)
目標類別装置
【課題】 類別するクラス(トラック、戦車、小型機 等)が増えるに従って類別処理が複雑化するため類別確率(類別結果が正しい確率)が低下する。
【解決手段】 目標が存在する地形の種類毎に当該地形に存在する目標の目標データを予め格納した参照データベースとを備える。目標の存在する地形に応じて、この参照データベース内の目標データを変更することで類別を行う。これにより、クラス(戦車、トラック、小型船 等)が増えても類別処理が複雑化することを避け、類別確率の低下を防ぐことができる。
(もっと読む)
気象レーダ信号処理装置及びそのグランドクラッタ除去方法
【課題】MTI処理後のグランドクラッタの消え残りと気象エコーとを高精度に区別する。
【解決手段】MTI処理A1により、目標反射波受信信号のIQデータからグランドクラッタ成分を除去することで気象エコー成分を抽出する。続いて、スペクトル評価処理A2により、気象エコー成分から順次正規化したパルスペア合成ベクトルを求め、そのパルスペア合成ベクトルの総和の絶対値からスペクトルの平坦さを評価する評価指標を算出し、この評価指標に基づいてグランドクラッタの除去と気象エコーの保持を行う。最終的に、ノイズ除去処理A3により、処理A2の評価指標に対する振幅成分の電力値に対する閾値処理を行って孤立点を除去することでノイズを除去する。このようにしてスペクトルの平坦さを評価し、この評価指標に対する閾値処理によりグランドクラッタ除去を行う。
(もっと読む)
精測進入レーダ、精測進入レーダ制御方法およびその制御用プログラム
【課題】未知の機種に対してSTCレベルを最適化する。
【解決手段】予め種々の機体について空港監視レーダ20および精測進入レーダ30で測定した反射波の受信信号レベルの相関関係を記憶した相関情報記憶部34Cと、精測進入レーダ30の周波数帯における受信信号の最適な表示レベルを推定する受信信号レベル推定部34を受信電波処理手段33内に備える。空港監視レーダ20で受信した航空機10の反射波の受信信号レベルと相関情報記憶部34Cの記憶内容とによって最適な表示レベルを推定し、この最適な表示レベルおよび空港監視レーダ20から送信された航空機10の位置情報によって未知の機種に対しても最適なSTCレベルをSTC算出部35が算出することを特徴とする。
(もっと読む)
レーダ装置、物標速度検出方法、及び、物標速度検出プログラム
【課題】不定性を生じさせることなく、物標の相対速度を広範囲にわたって検出可能なレーダ装置を提供する。
【解決手段】船舶用レーダ装置は、信号発生部と、送信タイミング制御部と、相関処理部と、速度検出部と、を備える。信号発生部は、送信パルス信号を発生させる。送信タイミング制御部は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理部は、送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。速度検出部は、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
(もっと読む)
車両位置探索システム
【課題】車載機器遠隔制御システムの本来の機能に制限を加えることなく、新たなセンサの追加を必要とすることもなく、車両位置探索システムを提供する。
【解決手段】携帯装置10は、無指向性アンテナ17及び指向性アンテナ18を備える。携帯装置10は、ユーザ入力装置11から指示信号が送られたとき、無指向性アンテナ17を用いて第1の車両探索信号を車載装置20に送信し、指向性アンテナ18を用いて第2の車両探索信号を車載装置20に送信する。車載装置20は、第1の車両探索信号の相関値と、第2の車両探索信号の相関値とを取得し、第1の車両探索信号の相関値と第2の車両探索信号の相関値との差がしきい値Aより大きいか否かを判断し、判断結果を携帯装置10に送信する。携帯装置10は、送信された判断結果をユーザ通知装置14に出力する。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】コヒーレント積分を行う場合において、干渉成分による影響を軽減した信号処理装置を提供する。
【解決手段】ソート処理部153は、振幅値に応じてデータ列を並び替える処理を行う。閾値検出部154は、ソート処理部153によって並び替えられたデータ列の中から、振幅値の小さい順に複数点のデータを選択する。そして、閾値検出部154は、選択したデータの平均値を算出し、この平均値に所定の係数αを掛けた値を閾値として算出する。ゼロ置換処理部151は、閾値検出部154から入力された閾値と、各データの振幅値とを比較する。閾値以上の振幅値を示すデータが存在した場合、そのデータ(スイープメモリ13から入力した複素信号)を0に置換し、コヒーレント積分処理部161に出力する。閾値未満の振幅値を示すデータは、スイープメモリ13から入力した複素信号をそのままコヒーレント積分処理部161に出力する。
(もっと読む)
レーダ装置及び目標探知方法
【課題】被探知目標を正確に探知する開口合成技術を実現する。
【解決手段】送信アンテナ及び受信アンテナの少なくとも一方として用いられる複数のアンテナ素子から構成されるアレイアンテナを含み、各受信アンテナから送られる信号を開口合成することにより被探知目標を探知するレーダ装置が、当該アレイアンテナのうち空間位相が等しくなる送信アンテナ及び受信アンテナの複数の組み合わせの中の少なくとも1つの組み合わせにおける受信アンテナから送られる信号の包絡線成分を取得する包絡線検波部と、この包絡線検波部により取得された包絡線成分に基づいて上記組み合わせ間の補正量を決定する決定部と、この決定部で決定された補正量を用いて、上記各受信アンテナから送られる信号の位相を開口合成処理の前に補正するか、又は、他の組み合わせにおける送信アンテナから放射される信号の位相を補正する補正部と、を備える。
(もっと読む)
レーダ装置
【課題】相関処理をするときに生じるノイズの影響を低減できるレーダ装置を低コストで提供する。
【解決手段】符号化された信号を符号信号として送信する送信手段と、符号信号が対象物で反射した反射信号を受信する受信手段と、送信手段から送信される符号信号を符号化するときの符号と同一の符号を比較符号として記憶する記憶手段と、符号と同一の比較符号と、反射信号から復号した符号とのいずれか一方の連続する複数の符号の中で予め定められたN番目の符号と、いずれか他方の符号との相関に基づいて対象物を測定する測定手段と、N番目の符号と他方の符号との相関に基づいて対象物を測定した後、N+1番目以降の符号と他方の符号との相関に基づき、測定手段によって計算された測定結果の中で誤った測定結果があるか否か判断する判断手段とを備える。
(もっと読む)
目標検出方法、パッシブレーダ装置及びレーダ装置
【課題】 信号帯域幅が広帯域或いは観測時間が大きくなる場合に、長時間積分を可能として、目標検出が可能である新規な目標検出方法、パッシブレーダ装置及びレーダ装置を提供すること。
【解決手段】 目標からの反射波の信号のドップラー周波数を補償して所定の間隔で分割し、その分割されたブロックごとに、前記送信波の複素振幅データを所定の間隔で分割したブロックを用いて、前記ドップラー周波数の補償に用いた周波数に基づき、遅延を周波数領域で補償して遅延が補償されたブロックごとの反射波の信号を加算したものを時間領域に戻して得られる相互相関関数のピークから目標を検出する。
(もっと読む)
超解像イメージングレーダー
121 - 140 / 573
[ Back to top ]