
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
141 - 160 / 573
捜索レーダ装置および捜索レーダ装置における不要波成分抑圧方法
【課題】サイドローブの影響により発生するゴーストのレベルを抑圧し、所望信号レベルを相対的に向上させ確実に所望の目的検出を可能にした捜索レーダ装置を得る。
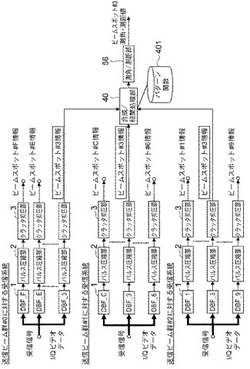
【解決手段】時分割で送信した複数の送信ビームに対し各送信ビーム毎に複数の各送信ビームと少なくとも同じ方向に関し同時に形成される複数の受信ビームに現れるアレーアンテナで受信した送信ビームの目標でのエコーから受信信号を抽出するレーダであり、各ビームスポット毎に、それぞれ複数の送信ビームのうちの所定数の連続する送信ビームからなる複数の送信ビーム群に対して受信ビームから抽出して得られる受信信号を時間軸上に並べた合成受信信号を生成する手段、合成受信信号とアレーアンテナのアンテナパターンを前記送信ビームの送信パルス幅及びビームスポット間隔に従い離散的に示す予め求めたパターン関数との相関処理を行い不要波成分を抑圧した受信信号を生成する手段を含む。
(もっと読む)
拡張現実におけるオブジェクトの追跡
一般的に、オブジェクトを追跡するための技術が説明される。いくつかの実施例では、システムは、モバイルフォンおよび拡張現実デバイスを備えてよい。モバイルフォンは、送信波を受信し、オブジェクトから反射された反射波を受信するのに有効である。モバイルフォンは、送信波と反射波との間の差異を判定し、判定された差異に基づいて第1の追跡データを生成するように構成され得る。拡張現実デバイスは、第1の追跡データを受信し、第1の追跡データに基づいてオブジェクトの位置に関する第2の追跡データを判定するように適応され得る。判定された第1の追跡データおよび第2の追跡データに基づいてディスプレイ上で画像が生成され得る。 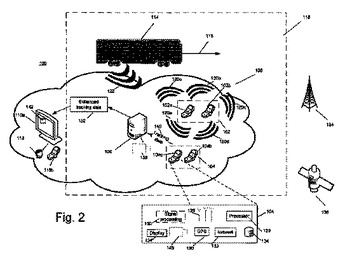 (もっと読む)
(もっと読む)
パッシブレーダ装置

【課題】全体の処理時間を短縮させることができ、パッシブレーダを用いた逆合成開口レーダによる高分解能レーダ画像を実用的な方式で取得できるパッシブレーダ装置を提供する。
【解決手段】直接波受信処理部11及び散乱波受信処理部12は、それぞれ直接波及び散乱波について、間欠的に受信処理を行う。この場合、直接波受信処理部11及び散乱波受信処理部12は、T0[sec]の受信をΔt[sec]の間隔でN回繰り返す。レンジ圧縮部13は、パルス毎に相互相関処理を実行することによってレンジ圧縮を行う。レンジ圧縮部13は、レンジ圧縮によって得た相互相関関数であるレンジプロフィールを、後段のクラッタ抑圧部14に送る。クラッタ抑圧部14は、レンジヒストリにおけるパルス方向平均を、各レンジプロフィールから差し引く処理を実行することによって、背景の静止物からの反射信号を抑圧する。
(もっと読む)
エコー信号処理装置、レーダ装置、エコー信号処理方法、およびエコー信号処理プログラム
【課題】送信パルスの条件に起因するぼやけを解消し、物標を明りょうに表示することができる画像処理方法を提供する。
【解決手段】測定データのうち、サンプル間の値の変化度合いが相対的に大きいサンプルの測定データを強調するエッジ強調処理を行い、エッジ強調処理後の測定データを用いてスキャン相関処理を行う。物標の輪郭のうち、自船に近い箇所は、サンプル間の値の変化度合いが相対的に大きい箇所である(エコーレベルが急激に立ち上がる箇所である)。この立ち上がり部分の測定データは、パルス長等の送信パルス条件が変化しても大きく変動しない情報である。したがって、エッジ強調処理を行ってからスキャン相関を行うことにより、送信パルスの条件に起因するぼやけ等を解消し、物標の輪郭を明りょうに表示することができる。
(もっと読む)
レーダ装置
【課題】定常的な変化と非定常的な変化を識別し分析作業効率の向上を図ったレーダ装置を提供する。
【解決手段】波動を照射し観測対象で反射した波動を受信し観測対象を画像化するレーダ装置であり、観測対象の同一領域の3つ以上のレーダ画像を相対的に短い短時間差と相対的に長い長時間差で得るレーダ画像生成手段001A−B,011,012,013,014と、短時間差および長時間差についてそれぞれに2つのレーダ画像の相互相関を計算して相互相関画像を生成する画像相関手段015と、短時間差における相互相関が第1の所定値よりも小さくなる領域を定常変化領域として抽出し、長時間差における相互相関が第2の所定値よりも小さくなる領域でかつ前記短時間差における定常変化領域以外の領域を非定常変化領域として抽出する変化領域判定手段016,017と、を備えた。
(もっと読む)
水稲収量予測モデル生成方法、及び水稲収量予測方法
【課題】圃場にて栽培される水稲の収量予測を現地調査により行うと労力を要し、全国に設置された観測点での気象データによる予測は精度確保が難しく、また、光学リモートセンシングによると天候の影響を受ける。
【解決手段】収量予測式算出部30は、SARを用いて広範囲で得られる生育期前半における標本圃場での後方散乱強度と、現地調査により得られる茎数等の水稲の生育的特徴との相関に基づき収量予測式を生成する。収量算出部34は、収量予測式を用い、生育期前半の対象水稲圃場を撮影したSAR画像により得られる後方散乱強度から水稲の生育的特徴の推定値を求める。水稲の収量構成要素である籾数との間で相関を有する水稲の生育的特徴の推定値から、籾数を予測する。
(もっと読む)
追尾装置
【課題】正確な追尾結果を得ることができる追尾装置を得る。
【解決手段】航跡確立判定結果に基づきどの観測時刻の観測データを推定に用いるかを選択する観測データ管理部12と、選択された観測時刻を全て基準時刻として設定し、各基準時刻における航跡の候補を状態ベクトル候補として生成する選択時刻状態候補生成部13と、状態ベクトル候補の尤度比を計算して、各基準時刻における尤度比が最大の状態ベクトル候補を探索する状態空間概探索部14と、各基準時刻における尤度比が最大の状態ベクトル候補を初期値として、反復計算により各基準時刻における尤度比が最大の状態ベクトル推定値を探索する状態空間詳細探索部15と、各基準時刻における尤度比が最大の状態ベクトル推定値の対応関係から最新時刻の最も確からしい状態ベクトル推定値を決定する状態相関処理部16と、前記状態ベクトル推定値から航跡の確立を判定する航跡確立判定部22とを備える。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】演算負荷の重い計算処理を用いることなく、ARスペクトル推定法におけるパラメータに基づいて、適当なモデル次数を設定する電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】送信波及びターゲットから到来する受信波からビート信号に基づいた複素数データを算出する周波数分解処理部と、ビート周波数の強度値からピーク値を検出してターゲットの存在を検知するターゲット検知部と、アンテナ毎に、前記ターゲットの存在が検知されたビート周波数である検出ビート周波数の複素数データに基づいて生成される異なる次数の正規方程式であって、該正規方程式に基づいて導かれる受信波数に応じて選択された次数の正規方程式に基づいて受信波の到来方向を算出する方位検出部とを備える。
(もっと読む)
目標追尾装置
【課題】 従来、目標の諸元のみから予測時刻における目標の位置等を予測しているために、追随遅れを生じたり、観測された目標の位置と予測位置の差異が大きくなり、安定追尾をすることが困難となる場合があった。
【解決手段】 目標の移動先となる目的地及び予測経路を目的地の優先度、目標の運動諸元を元に推定し、その目的地に向けた移動経路を等速円運動や比例航法により予測することにより、予測位置と観測される目標との位置差を減少させ、追随遅れの解消や安定した追尾維持や追尾精度向上を実現する。
(もっと読む)
移動物体の監視システム
【課題】監視する必要のある移動物体をより的確に監視できるようにする。
【解決手段】漏洩伝送装置を伝送媒体として漏洩伝送装置の両端の一方の端側から他方の端側へ第1の送信信号を送出する第1の機器100、漏洩伝送装置を伝送媒体として漏洩伝送装置の両端の他方の端側から一方の端側へ第2の送信信号を送出する第2の機器200、及び第1及び第2の漏洩伝送路301,302の一方の漏洩伝送路から第1の送信信号が放射した第1の電波が監視対象の移動物体に反射した第1の反射電波を漏洩伝送装置を介して受信した第1の受信信号の変化と第1及び第2の漏洩伝送路の一方の漏洩伝送路から第2の送信信号が放射した第2の電波が監視対象の移動物体に反射した第2の反射電波を漏洩伝送装置を介して受信した第2の受信信号の変化との違いに基づいて監視対象の移動物体の2次元の動きを検知する検知部400を備えている。
(もっと読む)
二次監視レーダ
【課題】二次監視レーダから航空機に有用な情報をTIS−Bの信号として配信する。
【解決手段】航空機に質問信号を送信する送信手段と、航空機から送信される質問信号に応答して送信される応答信号を受信する受信手段とを有し、当該受信手段が受信する応答信号を利用して航空機の飛行を監視する二次監視レーダであって、所定の範囲にADS−Bを搭載する航空機であるADS−B搭載機が存在するとき、ADS−B搭載機に送信するTIS−B信号を生成する生成手段を備え、送信手段は、生成手段が生成したTIS−B信号を送信する。
(もっと読む)
目標追尾装置及びコンピュータプログラム及び目標追尾方法
【課題】比較的狭い範囲内に複数のピーク画素がある場合でも、少ない計算量で精度の高い相関処理をする。
【解決手段】ピーク画素抽出部132は、目標画素のなかから、隣接する画素よりも画素値が大きい画素(ピーク画素)を抽出する。特徴位置算出部133は、目標の特徴を表わす特徴点の位置(特徴位置)を算出する。特徴距離算出部134は、ピーク画素の位置と特徴位置との間の距離(特徴距離)を算出する。特徴方位算出部135は、ピーク画素の位置から見た上記特徴位置の方位(特徴方位)を算出する。相関処理部140は、特徴距離と特徴方位とを含む相関パラメータに基づいて、相関処理をする。
(もっと読む)
送信装置、送信方法、受信装置、受信方法、物標探知装置、および物標探知方法
【課題】2次エコーや干渉を抑圧し、物標による真の像のみを正確に探知できる物標探知装置を実現する。
【解決手段】送信部12は、短パルス信号PSと中パルス信号PMとを含むパルス列PGを、所定のパルス列繰り返し周期PRIで繰り返しながら送信する。少なくとも1つのパルス列PGでは、それぞれのパルス列PGの開始タイミングを基準にしてパルス列PG内での短パルス信号PSおよび中パルス信号PMの送信タイミングとが異なるように設定されている。受信信号処理部14は、このようなパルス列PGの各パルス状信号の受信データを取得し、それぞれのパルス列PGの開始タイミングを基準にした各パルス状信号の時間的位置が一致するように、受信データを置き換える。そして、受信信号処理部14は、置き換えた受信データをパルス列PG間で比較し、パルス列PG間での再現性等を得ることで、2次エコーや干渉と真の像とを識別する。
(もっと読む)
画像変化選別装置
【課題】地表面に生じた物理的な変化を対象に、ノイズが残った状態でも変化領域の特徴量抽出および選別対象変化候補領域の限定を行い、選別対象変化であるか否かを判定可能な画像変化選別装置を得る。
【解決手段】変化抽出結果画像のノイズ除去部2と、特徴量抽出部3と、画像をセグメント分割するセグメント生成部4と、セグメント位置調整部5と、セグメントの交差特徴算出部6と、交差特徴に基づくセグメント選択部7と、セグメント変換部8と、交差特徴と変換後セグメントとに基づくマッチング用のテンプレート選択部9と、選択されたテンプレートと変換後セグメントとのマッチング部10と、マッチング結果の適合テンプレートの空間的連続性評価結果に基づき適合テンプレートを選択するテンプレート評価部11と、選択後適合テンプレートTsを空間的に配置した変化選別結果を出力する変化選別部12と、を備えている。
(もっと読む)
目標物探知装置および目標物探知方法
【課題】目標物が停止したのか失探したのかを判別して、追尾の誤りを削減することを目的とする。
【解決手段】ドップラ効果を利用して目標物が探知するレーダ装置の監視領域を分割した複数の分割範囲ごとに、電波到達可能であるか否かを示す電波到達可否情報と、ドップラ効果が有るか無いかを示すドップラ情報を関連付けて記録し、最後に探知された目標物の追尾結果を示す追尾情報と今回探知した目標物の探知結果を示す探知情報を用いて、最後に探知した目標物と今回探知した目標物とを関連付け、追尾処理が中止された対象の最後に探知された目標物の追尾情報に含まれる位置情報を参照して、最後に探知された目標物が含まれる分割範囲を検知し、該分割範囲において電波到達可能か否かとドップラ効果の有無を判定して、最後に探知された目標物が停止したかを判定する目標物探知装置および目標物探知方法である。
(もっと読む)
レーダ装置
【課題】測角精度を向上できるレーダ装置を提供する。
【解決手段】複数の素子を有し、複数の素子が順番に複数の第1素子12aと第2素子11aと第3素子11a´と複数の第4素子12a´とに分割されたアンテナ10と、観測角度範囲全体を第2素子と第3素子とで覆うビームを形成し、所定角度を中心とする所定範囲を複数の第1素子と複数の第4素子とで覆うビームを形成し、複数の素子全体で所定角度を中心とする所定範囲内の任意の方向にビームを形成するビーム成形部34と、ビーム成形部で形成されたビームに基づきモノパルス測角を行う測角部37とを備える。
(もっと読む)
レーダ装置
【課題】安定した相関追尾が可能なレーダ装置を提供する。
【解決手段】FMCW方式のスイープ信号を送受信する送受信器20と、送受信器からの信号に基づき算出された目標の速度によって該目標を速度範囲毎にグルーピングし、速度範囲毎の速度ヒストグラムの度数に基づき自速度を抽出し、自速度を含む速度グループ内でレンジを分割し、分割レンジ毎にクロスレンジのヒストグラムを算出し、算出されたヒストグラムの度数が最大のクロスレンジ位置を算出し、分割レンジ毎に抽出された度数が最大のクロスレンジ位置を用いて曲線フィッティングして反射点の曲線を抽出する速度グルーピング部36と、速度グルーピング部によってグルーピングされた速度グループ毎に相関追尾を行う相関追尾部37を備える。
(もっと読む)
レーダ偽像除去処理装置及び方法
【課題】レーダにおいて、離散的にしか帯域を使用できない場合においても、ターゲットの偽像を除去して、連続的な広帯域を使用した場合と等価の効果を得る。
【解決手段】受信信号を出力する一時記録部10と、外連続的な帯域の相関関数を出力する全帯域用全帯域用相関関数生成部11と、前記相関関数と前記受信信号との相関処理を行って第1の処理信号を出力する全帯域用処理部12と、送信信号と同じ離散的な帯域の相関関数を出力する離散帯域用相関関数生成部13と、前記相関関数と前記受信信号との相関処理を行って第2の処理信号を出力する離散帯域用処理部14と、前記第1の処理信号と前記第2の処理信号とを重ね合わせ処理することにより、前記第2の処理信号に包含される前記第1の処理信号の部分信号を、実際のターゲット信号として採用することにより、ターゲット信号の偽像である信号を除去処理する重ね合わせ処理部15とを有する。
(もっと読む)
機体座標において目標に対する干渉角を決定するための方法および装置
【課題】航空機機体座標内で目標への物理的角度を求めるためにレーダエコーデータを処理する方法を提供する。
【解決手段】このレーダエコーデータはアンビギュオウスレーダチャネル(226)と左のレーダチャネル(224)で受信されるレーダエコーデータ間の位相差、右のレーダチャネル(228)とアンビギュオウスのレーダチャネル(226)で受信されるレーダエコーデータ間の位相差、および右のレーダチャネル(228)と左のレーダチャネル(224)で受信されるレーダエコーデータ間の位相差を含む。本方法は3つの位相差について位相バイアスを調節するステップ(570、572、574)と、3つの位相差間の位相のアンビギティーを解析することで信号を供給するステップ(576)と、航空機機体座標内で目標への物理的角度を与えるためにその信号をフィルタ処理するステップ(578)とを含む。
(もっと読む)
周波数変調レーダシステム内の干渉を抑制するためのシステムおよび方法
本発明は、第1のマイクロ波放射を放出するための放出器と、第1のマイクロ波放射から引き出される第2のマイクロ波放射を検出するための受信機と、放出器および受信機に接続された制御システムとを有するシステムに関している。第1のマイクロ波放射は、複数の時間ポイントで、これらの時間ポイントに割り当てられた異なる周波数で放出される。時間ポイントと周波数の相関は、ランダムまたは擬似ランダムである。別法または追加として、時間ポイントにおける放出または受信のための時間期間の長さもランダムまたは擬似ランダムである。本発明は、さらに、周波数変調レーダシステム内の干渉を抑制するための方法に関している。 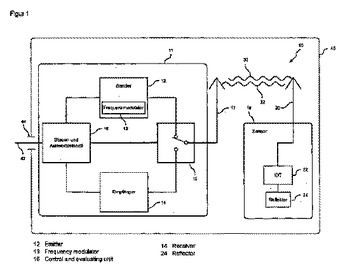 (もっと読む)
(もっと読む)
141 - 160 / 573
[ Back to top ]