
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
161 - 180 / 573
多目標追尾装置
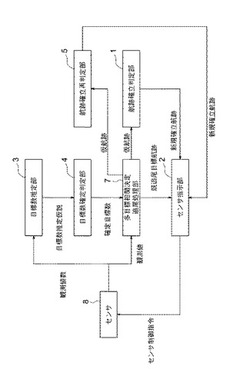
【課題】早期にかつ正確に目標航跡を確立させる多目標追尾装置を得る。
【解決手段】サンプリング時刻毎の観測値数の履歴から目標数の仮説を立て、仮説の信頼度を計算することにより目標数を推定する目標数推定部3と、当該信頼度により目標数を決定する目標数確定判定部4と、決定された目標数に応じて多目標相関決定追尾処理部7の仮航跡の候補を抽出し、当該候補の最新の平滑値の尤度を過去数サンプリング時刻分の観測値に対して計算し、最も尤度が大きい仮航跡を選択して航跡を確立する航跡確立再判定部5とを備え、多目標相関決定追尾処理と並行して目標数推定を行って、分離目標の存在が確認されたら、多目標相関決定追尾処理で生成された仮航跡群から最も確度の高い航跡を抽出して確立させることによって、早期にかつ正確に目標航跡を確立させる。
(もっと読む)
レーダ装置及びレーダ信号処理方法

【課題】 追尾性能を向上させたレーダ装置及びレーダ信号処理方法を提供する。
【解決手段】 アンテナ部20は、レーダ信号の送信及び受信を行なう。目標検出部40は、アンテナ部20が受信した受信信号に基づいて、所定の捜索領域を捜索して目標を検出する。追尾処理部50は、目標検出部40が検出した目標を追尾するための追尾処理を行う。レーダ制御部10は、目標検出部40による捜索領域の捜索を制御する。レーダ制御部10は、捜索領域を方位方向に複数の領域に分割し、複数の領域のそれぞれを更に距離方向に分割して、隣り合う分割領域の一部が重複するように複数の分割領域を生成し、同一の方位について、分割領域間の捜索に時間差が生じるように、捜索順序を設定する。
(もっと読む)
相関受信処理装置
【課題】空間中に複数種類の信号が伝搬されている場合であっても、所望信号及びその他の信号のサイドローブを抑圧することが可能な相関受信処理装置を提供する。
【解決手段】抑圧ウェイト算出部2233は、信号SBを零に抑圧するための抑圧ウェイト行列WBと、信号SCを零に抑圧するための抑圧ウェイト行列WCとを算出する。不要信号抑圧部2232は、FFT後の信号に対して、抑圧ウェイト行列WB,WCを掛け合わせ、入力信号行列Xにおける信号SB,SCを抑圧する。また、サイドローブフリー係数算出部2234は、抑圧ウェイト行列WB,WCが掛け合わされた入力信号行列Xの状態を考慮し、信号SAのサイドローブを抑圧するための自己相関のサイドローブフリー係数行列を算出する。そして、サイドローブ抑圧部2236は、不要信号抑圧部2232からの信号に、サイドローブフリー係数行列を掛け合わせることで、信号SAのサイドローブを抑圧する。
(もっと読む)
観測信号処理装置
【課題】観測装置と物標の間に相対速度が有る場合でも、良好なコヒーレント積分を行うことの出来る観測信号処理装置を提供する。
【解決手段】1探査当たり複数回の搬送波で変調されたパルス信号を探査信号として順次送出し、物標で反射された反射信号と、パルス信号の遅延変調パルス信号に基づいて複数の観測値を得、該得られた観測値をコヒーレント積分して積分値を外部に対して出力することの出来る装置であって、観測すべき領域に応じたコヒーレント積分回数を格納するメモリ、観測すべき領域に応じたコヒーレント積分回数分のパルス信号を探査信号として送出する手段、送出されたパルス信号の反射波を補足し観測値として蓄積する手段、概算相対速度を格納するメモリ、物標の概算相対速度に基づいて位相補正量を演算する手段、演算された位相補正量に基づいて、観測値について位相重み付きコヒーレント積分を行って外部に出力する手段から構成される。
(もっと読む)
目標相関処理装置、目標相関処理方法及びプログラム
【課題】地上目標物に適した目標相関処理装置を提供する。
【解決手段】目標物センシング情報が示す目標物の位置、速度、加速度、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向のうちの何れか複数を少なくとも用いて、所定時間経過毎の目標物センシング情報が示す目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、過去に受信した目標物センシング情報を更新する。そして、受信した目標物センシング情報と、予測処理により更新された更新後の目標物センシング情報とが相関するかを判定する。また、受信した目標物センシング情報と更新後の目標物センシング情報とが相関すると判定した場合には、更新後の目標物センシング情報を受信した目標物センシング情報に再更新する。
(もっと読む)
機械の内部室の監視システム
機械(2)の内部室に対する監視システム(20)は内部室(6)にレーダービーム(28)を入射するレーダー源(26)、内部室(6)で反射するレーダービーム(32)を受信しこのビームを受信信号(36)として出力するレーダー受信機(34)、受信信号(36)からの実際値シグネチャ(40a)を検出しこれを記憶されている機械(2)の無欠陥を表わす設定値シグネチャ(40b)と比較するための制御・評価ユニット(38)、実際値シグネチャ(40a)の設定値シグネチャ(40b)からの偏倚が許容尺度(44)を越える時に欠陥信号(46、52a、b)を出力するための出力ユニット(42)を備える。 (もっと読む)
航空機位置測定システム、該システムに用いられる応答信号判別方法及び応答信号判別プログラム
【課題】受信局で受信される信号のみでモードA応答かモードC応答かが判別可能な航空機位置測定システムを提供する。
【解決手段】位置情報処理手段(データ処理部30)では、応答信号種類判別手段(受信情報収集部31、信号抽出記録部34、モードC信号変換部35、モードC信号種類判定部36、モードA信号変換部37、モードA信号種類判定部38)により、各受信局21,22,…,25で受信された応答信号のビット列が気圧高度情報(モードCコード)に変換されると共に、同気圧高度情報と幾何学的高度情報とが比較され、この比較結果に基づいて、上記応答信号がモードA信号に対応するモードA応答か上記モードC信号に対応するモードC応答かが判別される。
(もっと読む)
レーダ装置
【課題】相関処理をするときに生じるノイズの影響を低減できるレーダ装置を低コストで提供する。
【解決手段】符号化された信号を送信し、当該信号が対象物で反射した反射信号を受信し、信号を符号化するときの符号と同一の符号を比較符号として記憶する記憶し、符号と同一の比較符号と、反射信号から復号した符号とのいずれか一方の連続する複数の符号と、いずれか他方の符号との相関がピークを生じるタイミングに基づいて対象物を測定する。
(もっと読む)
スペクトル拡散型レーダ装置
【課題】スプリアス信号の発生を抑制し、安価で探知距離範囲の広い高性能なスペクトル拡散型レーダ装置を提供する。
【解決手段】スペクトル拡散型レーダ装置100は、第1の発振信号を第1の擬似雑音符号で変調して、スペクトル拡散された拡散信号を探知用電波として放射し、物体に反射されて戻ってきた探知用電波を受信信号として受信し、第2の擬似雑音符号と前記第1の発振信号とに基づいて、前記受信信号を逆拡散して復調信号を生成するスペクトル拡散型レーダ装置であって、所定の周波数で符号を発生させることで繰り返し符号を生成する繰り返し符号発生回路408aと、前記第1の擬似雑音符号を時間遅延させた擬似雑音符号と前記繰り返し符号との間で排他的論理和演算を行って得られた結果を前記第2の擬似雑音符号として出力する排他的論理和演算回路409aとを備える。
(もっと読む)
信号処理装置、レーダ装置及び信号処理プログラム
【課題】受信信号の種類に応じて柔軟に信号処理を行うことが可能な信号処理装置を提供する。
【解決手段】レーダ指示機3は、受信信号取得部13と、種類識別処理部18と、種類別信号処理部20と、を備える。受信信号取得部13は、レーダアンテナ11が受信した受信信号を取得する。種類識別処理部18は、受信信号の種類を識別する。種類別信号処理部20は、受信信号を種類ごとに抽出する。また、前記種類別信号処理部20は、抽出された受信信号に対して、受信信号の種類ごとに個別の信号処理を行う。
(もっと読む)
物標探知装置、物標探知方法、および物標探知プログラム
【課題】より正確なスキャン相関処理を行える物標探知装置を実現する。
【解決手段】物標探知装置100の相関処理部6は、スイープメモリ2に記憶された極座標系のエコーデータと、読出用メモリ70Bにて極座標系で記憶された前回スキャンのスキャン相関処理後記憶データとを、スキャン相関処理する。この際、アドレス決定部5は、アンテナ回転情報取得部3からのアンテナ回転情報と位置検出部4からの位置情報および船首方位とを用いて、スイープメモリ2からのエコーデータと、読出用メモリ70Bからのスキャン相関処理後記憶データとの座標系を一致させるように、読出アドレスを設定して、読出用メモリ70Bへ与える。書込用メモリ70Aは、アドレス決定部5により今回スキャンの基準タイミングの座標系で設定された書込アドレスに準じて、相関処理部6からのスキャン相関処理後データを記憶する。
(もっと読む)
信号処理装置、レーダ装置、信号処理プログラム及び信号処理方法
【課題】簡単な構成で、不要信号を抑圧しつつ高速移動ターゲットの検出を可能とする信号処理装置を提供する。
【解決手段】信号処理部は、スイープメモリと、スキャン相関処理部11と、出力切替部12と、を備える。スイープメモリは、アンテナが受信した信号の信号レベルを示した受信データを取得する。スキャン相関処理部11は、受信データにスキャン相関処理を施したスキャン相関処理済データを出力する。出力切替部12は、受信データの信号レベルが所定の出力切替閾値以上である場合は当該受信データを出力し、受信データの信号レベルが出力切替閾値未満の場合はスキャン相関処理済データを出力する。
(もっと読む)
位相情報を用いたサブミリ波レーダー
サブミリ波長アクティブレーダーシステム(10、20、30)のための信号処理装置(30)は、レーダーシステムによって受信されダウンコンバートされた信号を処理する。このダウンコンバート信号は、時変振幅とコンテンツに依存する周期的成分を有する位相成分とを有する視野中の所定のピクセルに対応する。コンテンツに関する情報は、周期的成分から識別される。振幅のみよりも位相を使用することによって、ダウンコンバート信号中に追加の情報が存在する。位相は、振幅のみよりも、オブジェクト、バックグラウンド及び大気条件のような、コンテンツ中の変化により敏感である。位相情報は、周期的成分が保持されることを可能とする。この周期的成分は、コンテンツフラター、サブミリ波定常波における変化、および、もし表面層が複数の半波長の厚さを有している場合、サブミリ波放射の受信された反射中における干渉縞に原因して、コンテンツに特有であり得る。 (もっと読む)
複数の角度から反射された信号を使用するサブミリ波レーダー
サブミリ波長レーダーシステムは、システムの視野内のコンテンツからの信号を受信し且つダウンコンバートするための受信器(20、27、90)と、ダウンコンバートされた信号からコンテンツに関する情報を決定するように構成された信号処理装置(30)とを備え、このレーダーシステムは、複数の照射または受信位置を有することによって異なる照射または受信角度から視野内の同じ点の信号を獲得するように構成され、且つ前記信号処理装置はコンテンツの位置または方向を決定するために、2個のまたはそれ以上の角度からの信号から決定された情報を使用するように構成されている。異なる角度からの情報を使用することによって、殆どの反射が鏡面反射性であってそのためレーダーシステムに向うオブジェクトの表面のみが検出可能であり、これは、多くのオブジェクトが認識可能ではないことを意味する、サブミリ波長の欠点に対処すること、即ち克服することが可能となる。 (もっと読む)
レーダ装置、目標探知方法及びプログラム
【課題】速度分散の大きいウェザクラッタ等を高度に抑圧でき、各受信信号で得たドップラ情報から目標の対レーダ速度を得る。
【解決手段】同一の変調の2以上の単位信号を送信単位である1パルス内に繰り返して配列したレーダ信号を生成する信号生成部と、前記レーダ信号を形成する同一の変調を施した単位信号を参照信号として、前記受信信号に含まれる単位信号の成分を圧縮するパルス圧縮部と、1パルス内でクラッタ成分を抑制するパルス内クラッタ抑圧部と、前記受信信号に消え残る信号成分を抑圧する消え残り信号抑圧部と、探知目標で反射した各距離の受信信号の単位信号をピックアップし、フーリェ変換処理により受信信号をドップラ周波数毎に積分して単位信号列積分値を得る単位信号列積分部と、前記単位信号列積分値を積分するパルス間信号積分部と、前記積分値について、閾値より大きい信号を目標信号として抽出する目標信号抽出部とを有している。
(もっと読む)
気象レーダ装置
【課題】種々の降水粒子が混在する観測範囲全域において高い精度の雨量強度の3次元分布を求めることを可能にする。
【解決手段】観測範囲の各高度のメッシュ毎に選択した雨量強度の種類または非降水エコーの判定結果を表す3次元の雨量強度選択データとメッシュ毎の降水粒子の種類を表す降水粒子データとを生成し、観測範囲の各高度のメッシュ毎に偏波間相関係数ρhvに基づいて降水エコーか非降水エコーかを判定し、降水エコーと判定された各メッシュに対して遮蔽マップ保存部に保存された遮蔽マップデータを用いて遮蔽領域に含まれているかを判定し、メッシュが遮蔽領域に含まれている場合は偏波間強度比Zdr以外を用いて降水粒子の種類の判定し、3次元の雨量強度選択データに基づいて観測範囲の雨量強度の3次元分布を算出する。
(もっと読む)
超高感度距離又は位置計測システム
【課題】三次元位置を正確に測位できるシステムを提供する。
【解決手段】UWB送受信機1と、サーバー3と、UWB用RFタグTとを、備え、UWB送受信機1は、RFタグTから反射されるM系列のPN符号を、同期加算及び相関計算する。
(もっと読む)
レーダ装置
【課題】超分解能ドップラー周波数の推定精度を改善したレーダ装置を得る。
【解決手段】複数の送信パルスを時系列的に繰り返し出射する送信機1、送信アンテナ2と、複数の送信パルスが目標3で反射された反射パルスを複数の受信パルスとして受信する受信アンテナ4、受信機5と、複数の受信パルスに基づいて、目標3の移動にともなうドップラー周波数を推定する超分解能ドップラー周波数推定手段8とを備えている。超分解能ドップラー周波数推定手段8は、複数の受信パルスの位相変化に基づいて、ドップラー周波数を超分解能推定する。
(もっと読む)
センサバイアス推定装置
【課題】バイアスベクトル推定値を高精度に算出可能なセンサバイアス推定装置を得る。
【解決手段】それぞれのセンサが、観測値と予測値とに基づいて相関観測値を算出するとともに、相関観測値に基づいてセンサ航跡を算出し、算出結果を出力する装置に適用され、複数のセンサ10、20のバイアスを推定するセンサバイアス推定装置であって、センサ航跡に基づいて、時刻同期および航跡相関を実行し、同一航跡と判定されたセンサ航跡の組を出力する同期処理部30と、同一航跡と判定されたセンサ航跡の組に対してバイアス格子点探索処理を実行し、バイアス推定値を算出するバイアス格子点探索処理部40と、相関観測値に基づいて、バイアス推定フィルタ処理を実行し、バイアスベクトル推定値を算出するバイアス推定フィルタ処理部60とを備え、バイアス推定フィルタ処理部60は、バイアス推定値をバイアスベクトル推定値の初期値として設定するものである。
(もっと読む)
レーダ装置
【課題】ゴーストの検出を抑え、更に相互相関の程度を抑圧することが可能であるレーダ装置を提供する。
【解決手段】送信アンテナ群と、受信アンテナ群と、送信切替手段と、仮想相関値取得手段と、ターゲット検出手段と、を備え、送信アンテナ群は、受信アンテナ群に包含され、送信切換手段は、受信アンテナ群に含まれる一部又は全部の受信アンテナを順次、送信アンテナとして機能させ、送信アンテナ群及び受信アンテナ群は、左右対称且つ不等間隔に一列に並べる。
(もっと読む)
161 - 180 / 573
[ Back to top ]