
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
1 - 20 / 573
目標追尾装置
レーダ装置
【課題】測距性能および距離分解能の向上を図ると共に、複数目標を目標の対処を可能にするレーダ装置を得る。
【解決手段】目標があらかじめ設定された範囲内の相対速度および相対距離を有し、相対速度を有する目標のPRI内距離のアンビギュィティを解く第1の条件と、相対距離を有する目標のPRI内の距離分解能が、FMレンジング後の距離分解能よりも高精度となる第2の条件とを備えたパラメータを設定し、設定したパラメータに基づき複数のPRIに渡って周波数変調されたキャリア信号に対してPRIでパルス内変調された送信信号を放射する送信機2を備えた。
(もっと読む)
レーダ装置及び車両

【課題】設置位置が高い場合であっても、必要な目標物を必要な観測範囲で検出および追尾できるレーダ装置を提供する。
【解決手段】単一または複数の送受信ビームによる広角のカバレッジ面および該カバレッジ面に直交する狭角のカバレッジ面を有し、広角のカバレッジ面を少なくともロール方向に回転させて送信する送受信器20と、送受信器からの送信に応答して該送受信器で受信された信号を処理することにより前方および回転により広角のカバレッジ面が接する側の路面を観測する信号処理器30とを備え、信号処理器は、送受信器からの送信に応答して該送受信器で受信された信号に基づいて広角のカバレッジ面における測距および測角により得られた極座標の信号を直交座標の信号に変換する座標変換部38と、座標変換部において得られた直交座標の信号をロール方向の回転に応じて補正する座標補正部40とを備える。
(もっと読む)
航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法
【課題】センサ間の相関処理結果が矛盾しても、相関処理結果を各センサで即時に一意的に決定して、全センサで同一のシステム航跡情報を得る。
【解決手段】相関処理部122(航跡間相関部)は、追尾処理部113が生成した自センサローカル航跡情報と、受信部121が受信した他センサローカル航跡情報433とを照合して、自センサシステム航跡情報422(航跡間対応関係)を生成する。システム航跡情報照合部123は、受信部121が受信した他センサシステム航跡情報434と、自センサシステム航跡情報422とを照合する。システム航跡情報修正部124は、システム航跡情報照合部123によるシステム航跡情報照合結果423を用いて、結果が一致するように自センサシステム航跡情報を修正する。
(もっと読む)
車載用のレーダ装置、車載用のレーダ方法および車載用のレーダプログラム
【課題】方位検出範囲の外に存在する対象物の方位を検出することができる車載用のレーダ装置を提供する。
【解決手段】車載用のレーダ装置は、整数倍の関係にない2種類以上の平均ピッチの受信アレーアンテナを実現する複数の受信アンテナと、前記2種類以上の平均ピッチの受信アレーアンテナのそれぞれによる受信信号について、前記対象物の方位を見かけ上で所定の角度だけ変化させるように位相回転を行い、当該位相回転を行った結果に基づいて前記対象物の方位を検出する方位検出処理を行い、検出された前記対象物の方位が一致すると判定した場合には前記対象物が前記見かけ上で前記方位検出処理における最も狭い方位検出範囲の内に存在すると判定する方位検出部と、を備える。
(もっと読む)
レーダ装置
【課題】DDOA法に基づくレーダ装置においてDOAの不定性を軽減するためのレーダシステムを提供する。
【解決手段】レーダー装置は、距離、方向、速度を記憶するデータ記憶部114と、目標物体150の運動軌跡を予測する追尾予測部115と、レンジの近接を判定し、レンジ制御信号を生成する干渉判定部116と、レンジ制御信号に応じて送信用拡散符号、受信用拡散符号の一方に1チップ未満の位相オフセットを与える符号制御部109と、レンジ制御信号に応じて干渉除去処理を行う干渉分離部110とを備え、干渉分離部110は、レンジ制御信号に応じて、近接する目標物体の当該レンジの信号または当該レンジに隣接するレンジの信号の一方を選択し、距離決定部111、速度検知部112、方向検知部113の入力とする。
(もっと読む)
車載用のレーダ装置、車載用のレーダ方法および車載用のレーダプログラム
【課題】方位検出範囲の内に存在する対象物が検出されているのか否かを判定することができる車載用のレーダ装置を提供する。
【解決手段】車載用のレーダ装置は、整数倍の関係にない2種類以上の平均ピッチの受信アレーアンテナを実現する複数の受信アンテナと、前記2種類以上の平均ピッチの受信アレーアンテナのそれぞれによる受信信号に基づいて前記対象物の方位を検出する方位検出処理を行い、検出された前記対象物の方位が一致すると判定した場合には当該検出された前記対象物の方位は正しいと判定し、検出された前記対象物の方位が不一致であると判定した場合には当該検出された前記対象物の方位は正しくないと判定する方位検出部と、を備えることを特徴とする。
(もっと読む)
受信装置
【課題】受信信号の処理効率を向上して負荷を軽減する。
【解決手段】受信装置は、検出手段と、デコード手段と、相関判定手段とを備える。検出手段は、受信信号からモードS応答のプリアンブルを特定する所定のパルスパターンの有無を検出する。デコード手段は、検出手段がモードS応答のプリアンブルを検出すると、プリアンブルとデータブロックで構成されるモードS応答をデコードする。相関判定手段は、検出手段がモードS応答のプリアンブルを検出すると、プリアンブルに続くデータブロックに含まれる各パルスの位相値のレベルと、プリアンブルの位相値のレベルとの相関を判定し、相関結果が所定条件のとき、プリアンブルに続くデータブロックのデコードを中止させるデコード中止通知をデコード手段に出力する。
(もっと読む)
レーダ装置
【課題】空間に存在している複数の目標の検出性能を高めることができるとともに、測距性能を高めることができるレーダ装置を得ることを目的とする。
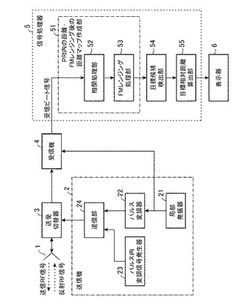
【解決手段】パルスドップラ処理の処理結果であるドップラ周波数と、1つの周波数変調帯域幅を用いるRGH処理の処理結果であるビート周波数fb及びPRI内の距離rpriとを用いて、複数の目標候補の組み合わせを決定し、複数の組み合わせの中から、正しい組み合わせを選択し、その組み合わせに係る各目標候補のビート周波数fb及びPRI内の距離rpriを用いて、各目標候補の相対速度v及び相対距離Rを算出する。
(もっと読む)
位置特定システム
【課題】航空機から送信された信号の反射信号を利用して航空機の飛行を監視する。
【解決手段】位置特定システムは、複数の距離測定装置と位置特定装置とを備える。各距離測定装置の送信手段は、信号を送信する。各距離測定装置の相関処理手段は、送信手段が送信した信号が航空機に反射した反射信号を受信し、送信手段からの信号の送信時刻と当該信号が反射した反射信号の受信時刻との相関を求める。位置特定装置の入力手段は、複数の距離測定装置から相関結果を入力する。位置特定装置の特定手段は、入力手段が入力した相関結果から求められる各距離測定装置と航空機との距離を利用して当該航空機の位置を特定する。
(もっと読む)
レーダ装置
【課題】レンジサイドローブを抑圧できるレーダ装置を提供する。
【解決手段】互いに異なる無線信号をL回空間に送信するM(Mは2以上の自然数)個の送信手段10−1〜10−Mと、前記無線信号が空間中に存在する物体により反射された反射信号を受信するN(Nは2以上の自然数)個の受信手段20−1〜20−Nと、受信手段20−1〜20−Nから出力される信号を合成する信号合成手段30と、を具備し、信号合成手段30は、受信手段20−1〜20−Nの信号分離部から出力される、l(エル)番目のサブパルス位相変調信号に由来したM×N個のサブパルス位相変調信号成分の位相及び振幅を調整し、調整後の各サブパルス位相変調信号成分のL個の合成波形を出力する信号合成部31と、信号合成部31から出力されたL個の合成波形を積算する信号積算部32と、を備える。
(もっと読む)
レーダ装置
【課題】航空機から送信された信号の反射信号を利用して航法支援する。
【解決手段】レーダ装置は、受信部と、相関処理部と、演算部とを備える。受信部は、アンテナを介して、第1航空機から送信された拡張スキッタをΩチャンネルで受信するとともに、当該拡張スキッタが第2航空機で反射した反射信号をΣチャンネル及びΔチャンネルで受信する。相関処理部は、受信部が受信した拡張スキッタと当該拡張スキッタの反射信号との遅延時間を求める。演算部は、受信部が受信した拡張スキッタと、当該拡張スキッタの反射信号を受信した際のアンテナの回転角度と、相関処理部で求められた遅延時間とを利用して、他の航空機の位置を推定する。
(もっと読む)
追尾装置
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置を提供する。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、該観測値を取得した機器の動作モードである捜索モード又は追尾モードに応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する座標系制御部から構成される。
(もっと読む)
情報表示装置、レーダ装置、ソナー装置、及び情報表示方法
【課題】センサの検出内容に所定の処理を行って得られる情報を表示する情報表示装置において、検出対象が信号処理の影響で消えたのか検出対象自体が存在しないのかをユーザが把握できるように情報の表示を行う構成を提供する。
【解決手段】レーダ指示器(情報表示装置)は、センサ信号取得部と、信号処理部と、表示部と、を備える。センサ信号取得部は、レーダアンテナの検出内容を示す信号であるセンサ信号を取得する。信号処理部は、センサ信号取得部が取得したセンサ信号に対して、第1信号処理部による第1信号処理と、第2信号処理部による第2信号処理と、を行う。表示部は、第1信号処理部を行った第1情報を表示画面に表示するとともに、第2信号処理を行った第2情報のうち、前記第1情報と異なる情報を、当該第1情報と異なる表示形態(表示色等)で表示画面に表示する。
(もっと読む)
無線タグリーダおよび監視システム
【課題】無線タグの方向探知精度がよい無線タグリーダを提供する。
【解決手段】無線タグ400の各タグアンテナ412、414、416からの電波から電力強度パターンと参照パターンとの相関誤差をそれぞれ算出する(S108)。参照パターンは、理想的な環境で、アンテナ部1が指向性を順次切り替えたときに垂直偏波を受信した場合の電力強度パターンである。よって、この参照パターンと各タグアンテナ412、414、416から受信した電波の受信電力強度パターンとの相関誤差Γは、受信した電波が水平偏波を主とする場合に大きな値となる。この相関誤差Γが最小となる電力強度パターンを方向推定用のパターンとして選択しているので、選択したパターンは垂直偏波を主とする電波を受信したときのパターンである可能性が高い。よって、高い精度で無線タグ400の方向探知を行なうことができる。
(もっと読む)
目標追跡システムとそのプログラム及び方法、角度追跡装置とそのプログラム及び方法、目標追跡装置とそのプログラム及び方法
【課題】装置規模の縮小、処理時間の短縮を実現する。
【解決手段】目標追跡装置13において、角度追跡装置12−iから2次元観測値と2次元航跡の対が入力されると、予測処理部131により、維持している3次元航跡から2次元予測値を算出し、相関処理部132により、算出された2次元予測値と角度追跡装置12−iからの2次元観測値の相関の有無を判定し、相関がないと判定された場合、2次元航跡抽出部133により、相関がないと判定された2次元観測値の対となる2次元航跡を抽出し、3次元航跡生成部134により、2次元航跡抽出部133で抽出した異なる角度追跡装置からの2次元航跡に基づいて、3次元航跡を生成する。一方、相関があると判定された場合、平滑処理部135により、相関があると判定された2次元観測値を用いて2次元予測値に対応する3次元航跡を更新する。
(もっと読む)
パッシブレーダ装置
【課題】演算負荷の増加やコスト高を招くことなく、直接波の相互相関成分を十分に抑圧して、精度よく目標を探知することができるようにする。
【解決手段】REF系DFT処理部16により算出された周波数スペクトルzref(f)を用いて、受信信号ベクトル形成部17により形成された受信信号ベクトルxに含まれている直接波の相互相関成分α0Da0を抑圧し、直接波抑圧後の受信信号ベクトルxnullを出力する直接波抑圧部18とを設け、IDFT処理部19が、直接波抑圧部18から出力された直接波抑圧後の受信信号ベクトルxnullをIDFTして、間接波の相互相関成分ynullを算出する。
(もっと読む)
ドップラ式速度計
【課題】ドップラ効果を利用して速度を計測するドップラ式速度計において正確な速度を得る。
【解決手段】所定周波数の送信波を送信する送信手段110と、送信波の反射波を受信する受信手段120と、反射波に基づくドップラ信号の周波数スペクトルを検出するスペクトル検出手段141と、を備え、検出した周波数スペクトルを用いて速度を計測するドップラ式速度計1であって、速度に対するドップラ信号の基準周波数スペクトルと検出した周波数スペクトルとの相関から基準周波数スペクトルを特定するスペクトル特定手段142と、特定した基準周波数スペクトルに対応する速度を反射波に基づいて検出した速度として出力する速度出力手段143と、を備える。
(もっと読む)
受信装置および受信方法
【課題】マルチパス環境においても良好な受信性能が得られる受信装置を得ること。
【解決手段】モードS信号を受信する受信装置であって、受信信号を直交検波する直交検波部2と、直交検波後の受信信号に対して周波数オフセットを補償する周波数補償部5と、周波数オフセットの補償後の受信信号に基づいて先行波の到来時刻である先行波到来時刻を推定する先行波検出部3と、周波数オフセットの補償後の受信信号のプリアンブル部と先行波到来時刻とに基づいて、伝搬路の推定を行う伝搬路推定部6と、伝搬路推定部6による推定結果に基づいて、周波数オフセットの補償後の受信信号に対してマルチパスによる歪みを補償する等化処理を行い、等化処理結果に基づいてビット判定を行う等化部7と、を備える。
(もっと読む)
信号処理装置、レーダ装置、および、信号処理方法
【課題】送信波の出力時間を短縮化して物体の角度検出精度を向上させることを目的とする技術に関する。
【解決手段】
ビート信号をAD変換してデジタルデータを導出し、デジタルデータを複数のデータ群に分割する。次に、データ群を高速フーリエ変換してデータ群の数に対応する複数の変換データを取得し、変換データを複数の組に分けて組ごとの相関行列を取得して、相関行列を平均した値を算出する。そして、相関行列を平均した値に基づいて検知点の角度を演算する。これにより、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
(もっと読む)
1 - 20 / 573
[ Back to top ]