
Fターム[5J070AH13]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 量子化 (27)
Fターム[5J070AH13]に分類される特許
1 - 20 / 27
干渉分類器、受信信号が雑音バーストを含むか又は正弦波信号を含む干渉を含むかを判断する方法、及び該方法のコンピュータープログラム製品
【課題】受信信号内に存在する干渉のタイプを求める干渉分類器を提供する。
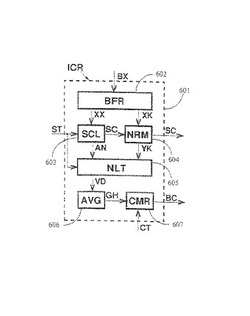
【解決手段】干渉分類器601は、信号のサンプルを含むデータを受信及び格納するように動作可能なバッファーと、信号サンプルのレベルに依拠してスケールファクターを計算するように動作可能なスケールファクター計算機603と、スケールファクターを用いて信号サンプルを正規化することによって、正規化信号サンプルを計算するように動作可能な正規化器604と、正規化信号サンプルに対し非線形変換を実行して変換された信号サンプルを計算するように動作可能な非線形変換器605と、変換された信号サンプルの平均を計算するように動作可能な平均化回路606と、変換された信号サンプルの計算された平均を、所定の閾値レベルと比較して、受信信号内に存在する干渉のタイプを求めるように動作可能な比較器607とを備える。
(もっと読む)
電波到来方向推定装置および電波到来方向推定方法

【課題】電波到来方向を推定するための受信回路の構成を簡略にした、電波到来方向推定装置および電波到来方向推定方法を提供する
【解決手段】複数のアンテナ11は相対的な位置を固定して配置される。受信機1は、複数のアンテナの数より少ない数であって、所定の電波を受信する。時分割スイッチ14は、受信機1に同時には1つのアンテナ11が接続するように、受信機1とアンテナ11との接続を所定の周期で切り替える。直並列変換器4は、受信機1とアンテナ11との接続を所定の周期で切り替えて受信機1で受信した信号を、複数のアンテナ11のそれぞれで受信した信号に分配する。到来方向算出部5は、複数のアンテナ11のそれぞれで受信した信号に分配した信号から、受信した電波の到来方向を算出する。
(もっと読む)
レーダ装置及びレーダ信号処理方法
【課題】 妨害除去処理に際してメインローブに与える影響を低減する。
【解決手段】 アレーアンテナ部10は、レーダ信号を受信する。レーダ制御部70は、アレーアンテナ部10によるレーダ信号の受信を妨害する妨害電波の方向を特定する。ビーム形成部40は、アレーアンテナ部10によって受信されたレーダ信号から、所望の受信ビームを形成し、レーダ制御部70によって特定された方向に妨害除去のためのSLCビームを形成する。SLC処理部50は、ビーム形成部40によって形成されたSLCビームを用いて、受信ビームから妨害電波の影響を除去する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】
レーダ画像と、レーダ画像に真航跡処理が施された真航跡画像について、静止物標に関する外部情報を取得することなく、エコーの揺らぎによる影響を抑制した上で静止物標を除去する画像処理装置及び画像処理方法を提供する。
【解決手段】
レーダ信号処理の下で画像を生成する画像処理装置であって、レーダ画像と、前記レーダ画像に真航跡処理が施された真航跡画像との積集合として前記画像を得る演算手段を備えることを特徴とする。また、前記レーダ画像と前記真航跡画像とが二値化され、かつ両者の論理積が前記積集合として求められることを特徴とする。
(もっと読む)
気象レーダシステムとその信号処理方法
【課題】受信信号から高精度に干渉波成分を除去する。
【解決手段】気象レーダ装置は、観測対象に向けてレーダ波を送信し、その反射波を受信し、反射波の受信信号を主系統と少なくとも1つの他系統とに分配する。そして、他系統の信号から他の無線局からの干渉波信号を抽出し、主系統の信号から上記抽出された干渉波信号を除去する。
(もっと読む)
二重偏波レーダ装置及び干渉判定方法
【課題】干渉波の混入を高精度に判定する。
【解決手段】 電力算出部172は、観測対象から反射された水平偏波受信波の電力値である水平偏波受信電力を算出し、電力算出部174は、観測対象から反射された垂直偏波受信波の電力値である垂直偏波受信電力を算出する。干渉判定部175は、垂直偏波受信電力に対する水平偏波受信電力の電力比を表す反射因子差を算出する。そして、干渉判定部175は、当該反射因子差が所定の閾値より大きい場合に、水平偏波受信波に干渉波が混入していると判定する。
(もっと読む)
到来方向推定装置及び方法
【課題】低処理負荷による高精度な到来信号の到来方向推定技術を提供する。
【解決手段】到来方向推定装置は、複数のセンサ素子により受信された各受信信号から得られるベースバンド信号ベクトルの相関ベクトルを用いることにより空間平均が適用された共分散行列を示す一般化HANKEL行列Rを生成する第1行列生成部と、一般化HANKEL行列Rの部分行列R1及びR2を用いて線形演算することにより雑音部分空間への射影行列としての性質を有する核行列Ω1を生成し、この核行列Ω1と直交する核行列Ω2
を生成する第2行列生成部と、核行列Ω1及びΩ2のいずれか一方を分子に他方を分母に用いて定義された角度スペクトラム、又は、核行列Ω1及びΩ2を用いた代数方程式から信号の到来方向を推定する推定部と、を備える。
(もっと読む)
気象レーダシステムとその降水強度算出方法及びプログラム
【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を送信し、その反射波を受信する送受信装置11〜16と、その受信信号から偏波毎の受信電力を算出する信号処理装置17とを備える気象レーダシステムにおいて、データ変換装置19は、偏波毎の受信電力をもとにレーダ反射因子(ZH,ZV)及び差分レーダ装置反射因子(ZDR)を算出し、受信電力の偏波間位相差(φDP)をもとに算出された比偏波間位相差(KDP)をもとに低分解能領域毎の平均降水強度(Rave)を算出し、レーダ反射因子(ZH)と降水強度(R)との関係式(ZH=B×Rβ:B,βは定数)における第1定数(B)を差分レーダ装置反射因子(ZDR)から算出し、さらに平均降水強度(Rave)及びレーダ反射因子(ZH)をもとに第2定数(β)を推定し、上記関係式に基づいて第1空間分解能の降水強度(R)を算出する。
(もっと読む)
気象レーダシステムとその降水強度算出方法及びプログラム
【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を送信し、その反射波を受信する送受信装置11〜16と、その受信信号から偏波毎の受信電力を算出する信号処理装置17とを備える気象レーダシステムにおいて、データ変換装置19は、受信電力をもとに高分解能でレーダ反射因子(Z)を算出し、受信電力の偏波間位相差(φDP)をもとに低分解能で比偏波間位相差(KDP)を算出し、比偏波間位相差(KDP)をもとに低分解能領域毎の平均降水強度(Rave)を算出し、レーダ反射因子(Z)と降水強度(R)との関係式(Z=B×Rβ:B,βは定数)における第1定数(B)を、レーダ反射因子(Z)をもとに算出し、第1定数(B)、平均降水強度(Rave)及びレーダ反射因子(Z)をもとに第2定数(β)を推定し、上記関係式に基づいて、第1空間分解能の降水強度(R)を算出する。
(もっと読む)
デジタルRFメモリ装置
【課題】周波数変調可能なデジタルRFメモリ装置の小型化を図る。
【解決手段】受信IF信号を分配する分配手段1と、分配された2つの受信信号をデジタル回路で処理できる周波数までダウンコンバートするダウンコーバート手段と、ダウンコンバートされた2つの受信信号を第1および第2のデジタル信号に変換する第1および第2のA/D変換手段8、9と、変換された第1および第2のデジタル信号を蓄積するメモリ10と、前記メモリ10に蓄積された前記第1および第2のデジタル信号を周波数変調する変調波発生回路手段15と、該変調波発生回路手段により変調された第1および第2のデジタル信号をアナログ信号に変換する第1および第2のD/A変換手段18、19と、該第1および第2のD/A変換手段の出力を合成する合成手段24を備える。
(もっと読む)
人工物検出装置及び人工物検出方法及び人工物検出プログラム
【課題】多偏波観測によって人工物のみを精度よく検出する。
【解決手段】合成開口レーダを用いた4偏波観測の結果を偏波特性データ201として予め記憶する人工物検出装置100にて、散乱成分抽出部101は、偏波特性データ201から、表面散乱成分と2回散乱成分と体積散乱成分とヘリックス散乱成分とを、観測位置ごとに抽出する。人工物検出部104は、散乱成分抽出部101により2回散乱成分と体積散乱成分とヘリックス散乱成分とのうち1種類以上の散乱成分が抽出された観測位置の集合である第1領域と、第1領域の周囲で散乱成分抽出部101により所定量以上の表面散乱成分が抽出された観測位置の集合である第2領域とを含む領域を、人工物として検出する。
(もっと読む)
レーダ装置
【課題】複数の異なる観測形態について同時に観測することを可能にしたレーダ装置を提供する。
【解決手段】相関処理のための観測モード毎に異なる信号系列情報を生成する制御手段(1)と、各観測モード毎に前記信号系列情報に従ってパルス毎に位相を0またはπに切替えたパルスのチャープ信号による照射波を生成し、観測方向に照射し、対象物からの反射波を受信するアンテナ手段(2,3,4,5,6)と、前記アンテナ手段で受信された信号を各観測モード毎にそれぞれの前記信号系列情報で相関処理を行いそれぞれの信号のみを圧縮する相関処理手段(7)と、各観測モード毎の相関処理の施された信号に画像処理を行ってそれぞれの観測モードの画像を生成する画像処理手段(8)と、を備えた。
(もっと読む)
人工物検出装置及び人工物検出方法及び人工物検出プログラム
【課題】多偏波観測によって人工物のみを精度よく検出する。
【解決手段】合成開口レーダを用いた2偏波観測あるいは4偏波観測の結果を偏波特性データ201として予め記憶する人工物検出装置100にて、散乱成分抽出部101は、偏波特性データ201から、表面散乱成分と2回散乱成分とを、観測位置ごとに抽出する。人工物検出部104は、散乱成分抽出部101により2回散乱成分が抽出された観測位置の集合である第1領域と、第1領域の周囲で散乱成分抽出部101により所定量以上の表面散乱成分が抽出された観測位置の集合である第2領域とを含む領域を、人工物として検出する。
(もっと読む)
レーダ装置及び信号のlog変換方法
【課題】受信した信号のダイナミックレンジの拡大を簡単な構成で行なうことができるレーダ装置を提供する。
【解決手段】受信信号の振幅値を表すlog波形を検出するlog検波器132aと、受信信号の周波数および位相を表わす位相波形を検出する位相検波器132bと、log検波器132aで検出されたlog波形で表される振幅値に応じて、位相検波器132bで検出された位相波形の振幅を調整するゲイン調整器132dとを備える。
(もっと読む)
レーダ信号処理方法
【課題】リソースの消費を低減してレーダ装置の小型化を図りうるレーダ信号処理方法を提供すること。
【解決手段】全ての距離に対する平方根演算、およびべき乗演算を前処理段階で行い、データテーブル13に記憶する。そして、距離ごとのSTC関数の逆関数を実際に算出する際には、前処理で計算した値を参照し、これを関数形(shape)に応じた回数でべき乗することによりSTCカーブの逆関数を得る。さらに、受信機利得補正量最小値K′ATT_STCの差異は、STCの逆関数の全てのデータに10(-ATT0/20)を乗算することで吸収し、STCカーブ形状の差異は、全てのデータにKr(-shape/2)を乗算することで吸収する。
(もっと読む)
レーダ装置、レーダ装置制御方法、レーダ装置制御プログラムおよびレーダ制御装置
【課題】近距離に位置する対象物までの距離や近距離に位置する対象物の移動速度を計測することができるレーダ装置、レーダ装置制御方法、レーダ装置制御プログラムおよびレーダ制御装置を提供すること。
【解決手段】ビート信号の包絡線を検波することにより、ビート信号を補正するための補正データを生成し、生成した補正データに基づいてビート信号を補正し、補正されたビート信号に基づいて距離計測処理および速度計測処理を行う。
(もっと読む)
物体検出装置
【課題】物体との正確な相対位置及び相対速度を検出する。
【解決手段】物体検出ECU1は、レーダセンサ2を介して、所定時間ΔT2毎に、物体の相対位置及び相対速度をそれぞれ検出する位置検出部13及び速度検出部14と、検出された相対位置を、第1線形フィルタを介して補正し、補正された相対位置である補正位置を求める位置補正部17と、求められた補正位置に基づき、第2線形フィルタを介して、補正された相対速度である補正速度を求める速度補正部18と、を備え、第1線形フィルタが、前回の前記補正速度に基づき、今回の前記補正位置を求めるフィルタであり、第2線形フィルタが、前回の前記補正速度に基づき、今回の前記補正速度を求めるフィルタであり、位置補正部17及び速度補正部18が、補正速度の初期値として、速度検出部14によって検出された相対速度を設定する。
(もっと読む)
誘導装置
【課題】 自らは電波を放射せずにレーダなどの電波源からの電波を受信して、この受信信号に対して追尾する誘導装置において、継続的に電波を受信できるかどうかは電波源の挙動次第であり、目標が消失し追尾が継続できない場合がある。目標が消失した要因としては、電波源が周波数を変更し受信帯域幅外の周波数になった可能性や、レーダのスキャン周期の影響で受信電力が低下している可能性等が考えられるが、前者、後者を同時に捜索することが非常に困難である。
【解決手段】 SUM系受信帯域とDIF系受信帯域を別々に制御することで、異なる周波数帯域を同時に捜索することを可能とする。これにより、電波源からの電波放射状況の影響が軽減され捜索性能が向上するとともに、追尾時間が長くなることになるため、誘導性能の向上が可能となる。
(もっと読む)
チャープ信号発生装置
【課題】 DDSを用いて、低雑音チャープ信号と広帯域チャープ信号とを出力するチャープ信号発生装置を得る。
【解決手段】 DDSから出力されるチャープ信号を分周する分周器と、分周器により分周されたチャープ信号と第二局部発振信号発生器の出力信号を周波数合成するミクサとを有した分周系と、DDSから出力されるチャープ信号を逓倍する逓倍器を有した逓倍系と、経路切換え信号に基づいて分周系の出力信号と逓倍系の出力信号を時系列に順次切換えて出力するスイッチを設けることで、所定のデューティ比で低雑音チャープ信号と広帯域チャープ信号を得る。
(もっと読む)
レーダー装置
【課題】車両に搭載されるレーダー装置に必要とされる性能を満たしながら、短時間で測定を完了することができるレーダー装置を提供する。
【解決手段】制御処理部は、第1の測定方式による測定を開始し、対象物が測定範囲内に存在するとき、対象物との相対位置及び相対速度を測定する。そして、制御処理部は、第1の測定方式によって測定した対象物の相対位置に基づいて再測定範囲を決定する。制御処理部は、再測定範囲を決定すると、再測定範囲のみを第1の測定方式よりも分解能の高い第2の測定方式で測定する。
(もっと読む)
1 - 20 / 27
[ Back to top ]