
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
21 - 40 / 535
船舶用航行支援装置
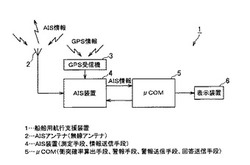
【課題】衝突の危険性があるとの認識を共有することにより、衝突の危険を回避する行動を適切に行えるようになる船舶用航行支援装置を提供する。
【解決手段】AIS装置4が、GPS情報から自船の位置、針路、速度を測定し、測定された自船の位置、針路、速度を含むAIS情報をAISアンテナ2から送信させる。また、μCOM5は、自船のAIS情報とAISアンテナ2が受信した他船のAIS情報から自船及び他船の衝突確率を算出し、閾値以上のときにその旨を警報すると共に、その旨を示す警報信号をAISアンテナ2から他船に送信させる。
(もっと読む)
レーダ装置及び受信データ処理方法

【課題】現スキャンで得られたデータに、過去のスキャン結果に基づいて推定したデータを正確に積分することが可能なレーダ装置及びこのレーダ装置で用いられる受信データ処理方法を提供する。
【解決手段】レーダ装置は、無線部、パルス圧縮部、ドップラフィルタ処理部、信号処理部、予測部、加算部及び抽出部を具備する。パルス圧縮部は、無線部で受信したパルス信号にパルス圧縮処理を施す。ドップラフィルタ処理部は、パルス圧縮後のデータにドップラフィルタ処理を施すことで、周波数ビン毎のレンジセルデータを生成する。信号処理部は、レンジセルデータを固有データに変換する。予測部は、前回のスキャン結果に基づき所定の範囲に目標が位置すると予測する予測データを作成する。加算部は、予測データと、次スキャン時に取得される固有データとを、同一の位置同士で足し合わせる。抽出部は、足し合わせたデータのうち、強度が最大の位置のデータを抽出する。
(もっと読む)
車両用移動物体検出装置
【課題】自車両周辺における移動物体の移動状態ならびに移動量の認識精度を向上した車両用移動物体検出装置を提供することことを課題とする。
【解決手段】移動遷移状態把握部13によって、自車両の移動量に基づいて回避対象物体の特徴点位置の移動遷移状態を算出し、回避対象物体の特徴点位置の移動遷移状態に基づいて、回避対象物体の移動を認識する。また、移動量算出部19によって、回避対象物体における特徴点位置の移動遷移状態に基づいて、自車両に対する回避対象物体の相対的な移動量を算出し、回避対象物体の移動遷移状態を認識する処理周期と比較して十分に長い周期で回避対象物体の移動量を算出する。
(もっと読む)
吐水装置
【課題】 吐水装置の使用前において、検出頻度の高い吐水部に対応する操作部の応答性を良くしておけば、他の吐水部に対応した操作部の応答性を落としておいても、吐水装置としての応答性に影響を与えないという知見に基く。
【解決手段】 複数の吐水口に夫々繋がる独立した給水路と、この給水路に夫々設けられた流路開閉弁と、この流路開閉弁の夫々を開閉操作するために設けられた検知センサと、前記検知センサの検知状態に基づいて、対応する前記流路開閉弁の状態を切替える制御部と、を備えた吐水装置において、前記制御部は、前記流路開閉弁の全てが閉弁状態であるときに、前記検知センサの内の1つを第一駆動周期で間欠動作させ、他の検知センサを前記第一駆動周期より周期の長い第二駆動周期にて間欠動作させると共に、前記第一駆動周期で間欠動作している検知センサが使用者を検知すると他の検知センサを第二駆動周期よりも短い周期で駆動する。
(もっと読む)
サーチ受信装置
【課題】監視対象外の周波数(例えば出現頻度の低い周波数など)を検出することなく、効率良く出現周波数の検出を行える電波監視用に好適なサーチ受信装置を提供する。
【解決手段】出現頻度算出部6は、算出条件設定部13で設定された出現頻度算出条件に基づいて、閾値設定部12で設定された閾値を超えた受信信号の出現頻度を算出し、周波数設定部7は、出現頻度算出部6が算出した出現頻度データに基づいて、受信部8が受信できる通信波の周波数を設定する。
(もっと読む)
目標追尾装置
【課題】PRI内距離を目標の運動諸元の推定処理に利用できるようにして、目標の運動諸元の推定精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】PRI内距離ゲート内外判定部14によりゲート内にあると判定されたPRI内距離毎に推定値の仮説を生成して、その仮説の信頼度を算出し、1以上の仮説の中で、信頼度が高い仮説を採択する推定値仮説生成部15や、推定値仮説生成部15により採択された仮説に係るPRI内距離を用いて、現時点での運動諸元の推定値を更新するPRI内距離フィルタ処理部16などを備える。
(もっと読む)
目標類識別装置
【課題】目標信号データのクラッタ推定精度に左右されずに、所望の類別性能を維持する目標類識別装置を提供する。
【解決手段】異クラッタ条件の教師信号データを用いてクラッタ推定精度別の辞書データを生成するクラッタ推定精度別辞書生成部2と、目標信号データのクラッタ推定精度に応じてクラッタ推定精度別の辞書データから照合対象となる辞書データを選択するクラッタ推定精度別辞書選択部5と、クラッタ推定精度別辞書選択部5により選択された照合対象辞書データに基づいて目標信号データの種類を判定する種類判定部6とを備えた。
(もっと読む)
レーダ画像処理装置及びレーダ画像処理方法
【課題】何らかの原因で強度画像や距離画像内の画素値が異常値になっている場合でも、目標物を検出することができるレーダ画像処理装置及びレーダ画像処理方法を得ることを目的とする。
【解決手段】目標領域検出処理部12が、目標候補画素設定処理部11により設定された目標候補画素と特定物が不明な画素(目標物、背景領域及びクラッタ領域のいずれも構成していない画素)とから構成される和集合の領域の空間的な大きさが、予め設定されている目標物の空間的な大きさと近似しているか否かを判定する。
(もっと読む)
追尾装置
【課題】フィルタを簡易に切り替えて早期に目標に追従可能とし、計算量の削減を図る。
【解決手段】等速直線運動モデル、蛇行運動モデル、多重運動モデルに基づくカルマンフィルタを用い、観測値から予測値、予測誤差共分散行列、観測誤差共分散行列および平滑値を算出する各カルマンフィルタ処理手段3〜5と、観測値、カルマンフィルタ処理手段3による各値に基づいて、目標が等速直線運動であるかを判定する等速直線運動判定手段7と、観測値、各カルマンフィルタ処理手段による各値に基づいて、各運動モデルに対する尤度を算出する尤度計算手段6と、各運動モデルに対する尤度および等速直線運動判定手段7による判定結果に基づいて、各運動モデルに対する信頼度を算出する信頼度計算手段8と、各運動モデルに対する信頼度に基づいて、各平滑値の加重平均値を算出する加重平均計算手段9とを備えた。
(もっと読む)
レーダ装置及び受信データ処理方法
【課題】 過去のスキャンで発生した雑音信号の影響を抑え、目標の位置を正確に検出することが可能なレーダ装置及び受信データ処理方法を提供する。
【解決手段】 レーダ装置は、無線部、パルス圧縮部、ドップラフィルタ処理部、信号処理部、予測部及び積分部を具備する。パルス圧縮部は、無線部で受信したパルス信号に対してパルス圧縮処理を施す。ドップラフィルタ処理部は、パルス圧縮後のデータに対してドップラフィルタ処理を施す。信号処理部は、ドップラフィルタ処理部で1スキャン毎に取得されるデータを固有データに変換する。予測部は、過去のスキャンで取得された固有データに基づいて次スキャン時の目標の位置を予測し、予測した位置に過去の固有データを累積した予測データを作成する。積分部は、次スキャン時に取得される固有データと、累積される積分数が予め設定された回数に抑えられた予測データとを積分する。
(もっと読む)
移動物体検出装置
【課題】複数の移動体を単一の移動物体であると誤認識してしまう状況の発生を抑制
【解決手段】移動物体検出装置1は、レーダ波を前方に向けて送信し、送信したレーダ波の反射波を観測した結果に基づいて、レーダ波を反射した反射点の位置である反射点位置を連続して検出する。検出された2つの反射点位置のうち、移動物体検出装置1から遠い方の反射点位置である第1反射点位置を移動物体における前端部の位置であるとし、移動物体検出装置1から近い方の反射点位置である第2反射点位置を移動物体における後端部の位置であるとして、第1反射点位置と第2反射点位置との間の距離である反射点間距離の時間経過による変動量が、反射点間距離の変動量が小さいことを示す予め設定された変動判定条件を満たす場合に、第1反射点位置および第2反射点位置がそれぞれ移動物体の前端部および後端部の位置であると判断する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】送信波照射に対する反射波に基づいて、少なくとも物体までの距離を含む物体単位データを車幅方向角度に対応して取得する。そして、反射波に基づいて得た物体の相対速度及び自車速に基づいて移動物か停止物という認識種別を判定し、認識種別の判定結果に基づいて、移動物の中から自車両180に対する先行車181及び先々行車182の各物体単位データを抽出し、停止物の中から道路に沿って設置された反射体の各物体単位データを抽出する。この後、自車両180、先行車181、及び先々行車182の各物体単位データを用いてこれら3点を円で近似することにより当該円の半径を算出し、円の半径と、反射体の列と、に基づいて道路形状を認識する。
(もっと読む)
物体検知装置
【課題】画像処理による負荷を極力増大させることなく歩行者等の存在を検知できる物体検知装置を提供する。
【解決手段】物体検知装置は、強度が第1閾値以上である反射波の方向の範囲を物体が存在する物体範囲として、物体の幅を算出する物体幅算出手段33と、物体の幅が所定幅以上である幅広の物体に係る反射波の強度等が特定の状況にある場合、第1閾値よりも大きな第2閾値により、幅広の物体に係る物体範囲を分割する物体範囲分割手段36と、その物体範囲の分割後の各範囲に対応する画像データに基づき、目的物を検出する処理を行う目的物検出手段39とを備える。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な前記物体単位データを抽出する。そして、自車と先行車との間における自車の走行路上および先行車と先々行車との間における先行車の走行路上のいずれかに停止物体が存在する場合、抽出した物体単位データの中から前記走行路上の停止物体に該当するデータを削除する。この後、左角度方向から右角度方向及び右角度方向から左角度方向の両方向についてそれぞれ、接続条件として距離が単調増加であるデータ同士をグルーピングして路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。
(もっと読む)
追尾装置
【課題】センサと目標との距離が大きい場合には追尾維持性能を発揮し、センサと目標との距離が小さい場合には、各追尾目標に対する追尾精度を向上させる。
【解決手段】センサを介して2つの観測値を取得した場合に、センサ位置を基準点とした2つの観測値のなす角度を算出する角度算出部21と、角度算出部21により算出された2つの観測値のなす角度に基づいて2つの観測値に対する重み係数を算出し、重み係数に基づいて各観測値の各観測値間での重心をそれぞれ算出する角度基準重心算出部22と、角度基準重心算出部22により算出された各観測値の重心および各追尾目標に対する予測値に基づいて、各追尾目標に対する平滑値を算出する平滑処理部24とを備えた。
(もっと読む)
道路形状推定装置
【課題】自車両が走行する道路の形状を従来より正確に推定可能とする道路形状推定装置を提供する。
【解決手段】自車両に搭載され、当該自車両が走行する道路の形状を推定する道路形状推定装置であって、自車両周囲の静止物の存在位置を複数の検出点として検出する物体検出部と、複数の検出点同士を第1の接続方法により線分で順次接続することによって、道路の形状を示す接続線を形成する接続線形成部と、接続線の一部または全部の区間が所定の条件を満たす形状を成している場合、当該区間を、道路に沿って路側静止物が二重に配置された二重路側物配置区間として認識する二重区間認識部と、二重路側物配置区間が検出された場合、当該二重路側物配置区間に含まれる複数の検出点を第2の接続方法により接続し直して接続線を修正する接続線修正部と、接続線に基づいて道路の形状を推定する道路形状推定部とを備える、道路形状推定装置である。
(もっと読む)
受信専用フェーズドアレイレーダアンテナの較正方法
【課題】受信専用フェーズドアレイアンテナをその動作環境で較正する方法を提供する。
【解決手段】 受信専用フェーズドアレイアンテナをその動作環境において較正する方法。異なっているが未知の偏波の二つの送信信号を、受信専用アンテナアレイを較正するために使用し、受信エレメント位置と偏波を正確に知る。この方法は、マルチパス信号と標準ノイズの存在下でアンテナエレメントの複合重みと較正信号の垂直方向成分と水平方向成分の大きさを決定する。較正するための二つの異なる方法が提供される。第1の方法は、三つのエレメントの組み合わせを使用し、小さな行列を使用し、次にエレメント毎に全ての可能な結果を平均して較正定数を決定する。第2の方法は、単独値分解を使用して一度に全てのエレメントの較正定数を求めるが、大きな疎行列の操作を必要とする。
(もっと読む)
歩行者検出装置、歩行者検出方法およびプログラム
【課題】歩行者をより確実に検出することができる歩行者検出装置、歩行者検出方法およびプログラムを提供する。
【解決手段】車両の前方に向かって電波を送信する送信部11と、車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部12と、歩行者によって反射された電波の特性である歩行者反射電波特性が予め記憶された記憶部22と、受信部12により受信された反射電波の特性を、記憶部22に記憶された歩行者反射電波特性と対比することより、電波を反射した物標が歩行者であるか否かの判定を行う情報処理部21と、が設けられている。受信部12により受信された反射電波の特性と、記憶部22に記憶された歩行者反射電波特性とを対比させることにより、電波を反射した物標が歩行者か否かの判定を行うことで、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定を行うことができる。
(もっと読む)
天気および地面の反射情報を生成するための方法およびシステム
【課題】天気レーダーリターンデータを三次元バッファに格納する方法およびシステムの提供。
【解決手段】航空機に置かれるシステム30は、レーダー信号を送信し、送信されたレーダー信号のレーダーリターンの結果として、レーダー測定値を生成するレーダー・システム40を含む。三次元バッファ43は、複数の記憶場所を含む。プロセッサ42は、生成されたレーダー測定値に基づいた三次元バッファの記憶場所の反射値と、記憶場所に関して以前に格納された反射値と、不確実性パラメータと生成しまたは更新する。地面エレメントのための正規化されたレーダー断面の不確実性パラメータは、各々のエレメントと関連する地面のタイプに基づいて初期化される。天気反射の不確実性パラメータは、演繹的な情報に基づいて初期化される。生成された反射値は、記憶場所による三次元バッファ装置に格納される。
(もっと読む)
レーダ装置、バス、および乗客移動検出方法、並びにプログラム
【課題】車内を移動中の乗客の有無を検出すること。
【解決手段】レーダ波の反射物の車内における位置情報を、反射が起こった位置およびその位置の反射頻度として取得する位置情報取得部21と、取得した反射頻度を、バスの短手方向に加算する反射頻度加算部22と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車していないときに予め行って取得した位置情報を記憶する記憶部23と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車しているときに行って取得した位置情報から記憶部23に記憶されている位置情報を減算し、その減算結果として乗客の位置情報を検出する乗客位置検出部24と、乗客位置検出部24が検出した異なる時刻の乗客の位置情報を比較して車内を移動中の乗客を検出する乗客移動検出部25と、を有するレーダ装置1を構成する。
(もっと読む)
21 - 40 / 535
[ Back to top ]