
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
521 - 535 / 535
全国合成レーダ雨量情報提供システム

【課題】隣接するレーダ雨量計の観測結果と合成する場合、個々のレーダ雨量計における観測特性の差を補正しきれないため、互いの接合部に段差が現れてしまうといった問題があり、連続的なレーダ雨量を精度良く求めることができない。
【解決手段】レーダ雨量計の全国合成手段1と、災害履歴検索手段2と、全国合成手段1より得られた精度の高い実況のオンライン合成レーダ雨量を用いる流出予測手段3と、レーダ雨量計補正手段4とを備える。全国合成手段1は、オンラインデータ、記録データを用いて、個別のレーダ雨量計が観測した雨量と地上雨量とを基に1kmメッシュ単位で、日本全土の連続的な雨量として定量的精度を高めた雨量値を算出し、雨量分布画像を作成表示する。全国26基のレーダ雨量計の観測値を収集し、時々刻々、地上雨量を用いた定量的補正と連続的な合成を行い、全国の3次メッシュ毎の合成レーダ雨量を作成する。
(もっと読む)
レーダ装置、及び該レーダ装置を備えた車両制御装置

【課題】 アンテナに付着する異物の存在を容易かつ正確に判定するレーダ装置、及び該レーダ装置を備えて適切な車両制御を実行する車両制御装置を提供する。
【解決手段】 送信IC2を用いて送信アンテナ1から送信波を送信すると共に、物体により反射された送信波の反射波を受信アンテナ3a〜3i及び受信IC4a〜4iにより受信し、信号処理部5で物体までの距離または方位を検出するレーダ装置において、受信アンテナ3a〜3iが、それぞれ略同一の受信特性及び略同一方向の指向性を有すると共に所定の間隔で並べられた受信アンテナを備えたアレイアンテナである時に、受信信号レベル検出手段により複数の受信アンテナで受信された受信信号レベルを検出し、異物付着判定手段により、複数の受信アンテナ間の受信信号レベルのばらつき、あるいはレベル差が所定値以上の場合には、受信アンテナ3a〜3iの前面に異物が付着していると判定する。
(もっと読む)
2つの送−受信所の間の距離を求める方法及びこの方法を実施するための送−受信所
1. 2つの送−受信所の間の距離を求める方法、及びこの方法を実施するための送−受信所。
2.1 送−受信所は、車両技術において、通常鍵なし錠装置において、電子鍵モジュール又は鍵モジュールを確認する評価装置として使用される。明確な確認番号により評価装置に割当てられる鍵モジュールが評価装置の近くにない時、錠装置の不活動化が阻止される。評価装置と鍵モジュールとの間の交信は、送−受信所間におけるデータ電報の伝送によって行われる。新しい方法は、送−受信所間の距離を簡単に求めるのを可能にする。
2.2.新しい方法では、少なくとも3つのデータ電報が送−受信所の間で交互に伝送され、少なくとも3つのデータ電報の各データビットに、当該データ電報の受信の際、それぞれのデータビットの受信の時点にフリーランニングカウンタの計数状態に相当する計数値が割当てられ、少なくとも3つのデータ電報の各々に、当該データ電報の受信中に求められる計数値の和又は平均値に相当する計数和が割当てられ、計数和の重み付けされる加算による和数が、送−受信所間の距離の尺度として形成される。 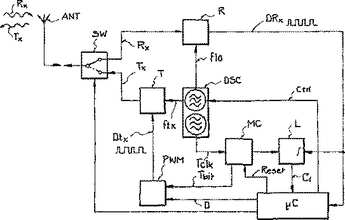 (もっと読む)
(もっと読む)
レーダ装置
【課題】ウェーブレット変換処理を利用するレーダ装置の規模を縮小すること。
【解決手段】入力信号を分解した後のウェーブレット展開係数wに、検出すべき所望信号と、不要なノイズおよびクラッタ成分とが含まれることに着目し、ウェーブレット展開係数wの軸上でスレショルドによる2値判定を実施することで、所望信号を検出する。すなわち、ウェーブレット展開係数wの軸上でCFARなどによる識別処理を実施することにより、スレショルドを越えた信号を検出信号として目標検出に供する。
(もっと読む)
車載用レーダ軸ずれ判定方法
【課題】 車載用レーダに関し、特に静止物を用いた車載用レーダ装置の軸ずれの誤判定を防止する軸ずれ判定方法を提供する。
【解決手段】 静止物分布からレーダの軸ずれ量を判定する際に、静止物分布に軸ずれ量の演算を間違う要素を検出したときは、その軸ずれ量の演算をキャンセルすることから成る。
(もっと読む)
レーダのタイミング調整方法およびタイミング自動調整機能を有するレーダ装置
【課題】 増幅器のオン/オフのタイミングおよびアンテナ選択のタイミングを精密に調整する。
【解決手段】 増幅器のオン/オフの調整の際には、送信信号の変調を停止し、スイッチ12にいずれのアンテナも選択させないことにより送信信号を全反射させて、ミキサ32の出力レベルの平均値が最小となるようにタイミングを制御する。アンテナ選択のタイミングの調整の際には、送信信号の変調を停止し、アンテナ10の近傍に反射物を置いたときに、ミキサ32の出力レベルの平均値が最大となるように選択のタイミングを調整する。
(もっと読む)
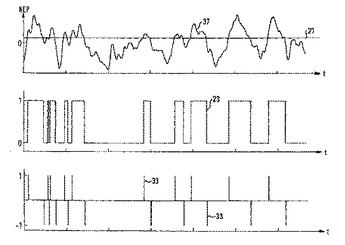
電波監視装置
【課題】 音声信号を高い精度で検出し、除去する電波監視装置を提供する。
【解決手段】 変換手段141が離散化された各受信信号を周波数領域の各信号に変換する。算出手段142が複数の変換された信号の大きさの最も大きい信号からm個(mは自然数:m=1,2,・・・)の信号のm個の周波数値を算出する。算出手段144が複数の変換された信号の大きさの最も大きい信号からn個(nは自然数かつn>m)の信号のn個の周波数値を算出する。統計値算出手段143、145、146がm個の周波数値を基にした第1の統計値とn個の周波数値を基にした第2の統計値を算出する。判定手段147が第2の統計値から第1の統計値を引いた値がある値よりも大きい場合に複数の変換された信号は音声信号であると判定する。分析手段が音声信号でないと判定された信号の分析を行う。
(もっと読む)
サブ開口サイドローブおよびエイリアスを軽減する技術
20dBを超えるいくつかのレベルの抑圧を提供する、サイドローブおよびエイリアスを軽減するための方法。方法は、1)サブ開口イメージに対して作用するように変更された、電波天文学において開発されたCLEANアルゴリズムのバージョン、2)CLEANアルゴリズムにおけるポイントを選択するサブ開口イメージピクセルの位相−振幅統計に基づく重み関数、および3)CLEANと一緒に、または別個に、サイドローブおよびエイリアスを軽減するサブ開口イメージピクセルの位相−振幅統計に基づく重み関数を含む。これらの方法は、すべての合成開口技術で使用されることが可能であり、SARに限定されない。 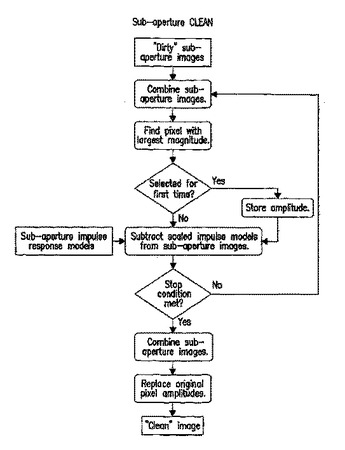 (もっと読む)
(もっと読む)
レーダ装置
送信部は、所定幅のトリガパルスによってパルス変調された所定の周波数を有するレーダ波を探査対象空間に発射する。受信部は、前記レーダ波の反射波を受信して受信信号を出力する。ローカルパルス発生部は、遅延部によって遅延された前記トリガパルスによってパルス変調された前記所定の周波数を有するローカルパルス信号を出力する。相関値検出部は、前記受信信号とローカルパルス信号との強度についての相関値を検出する。遅延時間可変部は、前記遅延時間を、前記トリガパルスの発生周期である前記所定周期の範囲内で順次変化させる。相関値記憶部は、可変される遅延時間毎に検出される前記相関値を記憶する。度数分布作成部は、記憶された相関値の前記遅延時間に対する度数分布を作成する。探査制御部は、作成された度数分布に基づいて、前記探査対象空間についての解析を行う。 (もっと読む)
間隔測定方法及び装置
本発明は、特に自動車(1)に連行される間隔センサ(5)と物体(5)との間の間隔測定を、電磁パルス(6)の送信及び物体により反射される信号(7)の受信、及び信号伝搬時間の検出により行う方法と、この方法の実施に適した装置に関し、物体(2)における反射後受信される信号(10)が量子化され、加算され、続いて平均値が形成され、方法の実施形態において、受信されるパルスが、変調信号(18)に重ねられる。 (もっと読む)
距離測定
本発明は、距離測定の方法であって、パルス状の電磁放射が少なくとも1つの送信器により発せられ、かつ反射された信号パルスが少なくとも1つの受信器により検出されるものに関する。本発明によると、対象物であって発せられた放射パルスが反射されるものからの距離が、パルスの伝播時間を決定することにより測定される。雑音が受信器により測定され、この受信器の雑音閾値を超える時点が決定され、信号パルスにより生成される雑音の変化が、それぞれ前記時点を含む複数の個々の測定を平均することにより検出される。
 (もっと読む)
(もっと読む)
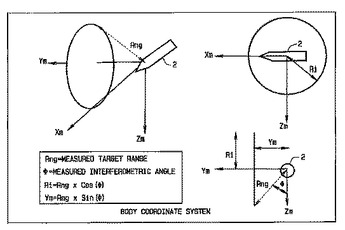
レーダ戻りデータを重み付ける方法および装置
前記レーダターゲット(48)の位置を決定することにおいて位相レーダエコーからの加算による地勢エコーフェーディングの影響を減少する方法が提供される。この方法は、レーダターゲットの地勢特徴から生じるレーダエコーフェーディングの程度に比例する、干渉角Φへ寄与する地勢特徴の影響を調整することにより、少なくともひとつのレーダエコーに基づきレーダターゲットへの干渉角Φを決定するステップと、干渉角Φをフィルタリングするステップとを含む。訂正された干渉角Φは、フィルタリングの少なくとも一部に基づいて提供される。
 (もっと読む)
(もっと読む)
時間領域のインパルス状の信号に基づく物体の高速な検出装置及び方法
超広帯域(UWB)RF信号を用いてターゲット領域における関心物体を検出するための方法及びシステムが開示されている。トランスミッタとアンテナアレイは、関心物体を含んでいるかもしれないターゲット領域を探査するために用いられる、超広帯域RFインパルス状信号を生成する。アンテナと信号処理手段は、ターゲット領域からの応答信号を受信し、一群の座標を生成するために応答信号を処理する。応答信号と既知の物体との間に対応が存在するか否かを決定するために、処理された応答信号の座標は、既存のデータベースにおける既知の物体の座標と比較さる。対応を示すものが存在する場合、既知の物体の存在が、システムのオペレータへ表示される。 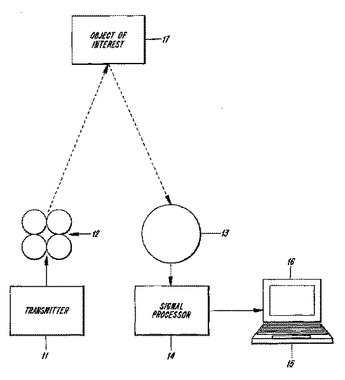 (もっと読む)
(もっと読む)
レーダ装置
【課題】 IQバランスの悪化により、偽スペクトルが発生し、距離,相対速度演算時間が増大するのを防止する。
【解決手段】 送信電磁波を出力する送信手段と、送信電磁波が目標物体で反射されて戻ってきた受信電磁波をIQ位相検波する受信手段と、この受信手段の出力信号を、FFT処理する信号変換手段と、この信号変換手段で変換されたデータの中に周波数の絶対値が同じで正負の両方に振幅レベルのピーク値を持つ一対のスペクトルがあれば、振幅レベルのピーク値の大きい方が真のスペクトルであると判定し、判定された真のスペクトルの周波数を用いて、目標物体との距離,相対速度を演算する信号処理手段とを備えたものである。
(もっと読む)
FMCWレ―ダ装置及び記録媒体
【課題】 移動物と静止物を正確に認識できるFMCWレーダ装置及び記録媒体を提供すること。
【解決手段】 ステッフ゜200では、周波数シフト量の幅を決定する。ステッフ゜210では、周波数シフトを行う。ステッフ゜220では、評価値|Vp|を算出する。ステッフ゜230では、近傍和Sum2を算出する。ステッフ゜240では、スペクトル全体和Sum1を算出する。ステッフ゜270では、全てのスペクトル全体和Sum1の値を比較して、真の周波数シフト量TSnを決定する。ステッフ゜280では、真の周波数シフト量にて周波数シフトしたスペクトルに関し、スペクトルピークの近傍和Sum2が閾値Thp以下か否かを判定する。ステッフ゜290では、移動物予測フラグがセットされているか否かを判定する。ステッフ゜300では、近傍和Sum2が閾値Thp以下で且つ移動物予測フラグがセットされていないので、そのスペクトルピークは静止物のスペクトルピークであると判断する。
(もっと読む)
521 - 535 / 535
[ Back to top ]