
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
101 - 120 / 535
目標追尾装置
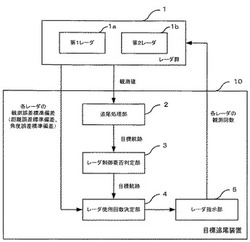
【課題】必要最小限のセンサ使用回数を効率的に決定することができる目標追尾装置を提供する。
【解決手段】目標追尾装置10は、追尾処理部2と、レーダ制御要否判定部3と、レーダ使用回数決定部4と、レーダ指示部5とを有している。追尾処理部2は、レーダ群1から得られた観測値を用いて目標の運動諸元を算出して、その算出した運動諸元から、目標航跡を導出するとともに、目標航跡の誤差共分散行列を算出する。レーダ制御要否判定部3は、目標航跡の誤差共分散行列に基づく目標航跡の推定精度と要求精度とを用いて、レーダ制御を実施するか否かを判定する。レーダ使用回数決定部4は、目標航跡の誤差共分散行列と、センサ毎の観測精度及び要求精度とを用いて、第1及び第2レーダ1a,1bのそれぞれについてのセンサ使用回数を制約付き最適化問題から導出する。
(もっと読む)
広帯域パルスレーダの距離計測方法

【課題】精度の高い距離計測が可能な広帯域パルスレーダの距離計測方法を提供する。
【解決手段】広帯域パルスレーダ信号の目標物からの反射波受信信号に対して各々異なる基底関数を使用する複数のウェーブレット変換を行なって各々ピーク値を算出する(ステップ23A,23B)。算出されたピーク値に補正を行ない(ステップ24)、この補正されたピーク値に基づいて距離算出を行なう。
(もっと読む)
目標検出装置及びコンピュータプログラム及び目標検出方法
【課題】少ない計算量で、目標と背景とを容易に区別できる評価値を算出することにより、目標の検出を容易にし、誤検出を減らす。
【解決手段】合計領域選択部132は、注目画素を通る複数の直線それぞれについて、複数の合計領域画素を選択する。直線判定部135は、上記複数の直線のうちから、合計領域選択部132が選択した複数の画素の輝度の合計または平均が最も大きい直線を判定する。背景領域選択部136は、注目画素を基準として、直線判定部136が判定した直線に対して略垂直な方向に位置する画素のなかから、複数の背景領域画素を選択する。目標判定部140は、注目画素の輝度と、複数の背景領域画素の輝度とに基づいて、注目画素が、目標画素であるか否かを判定する。
(もっと読む)
レーダ処理装置
【課題】信号処理に最大限の処理時間を費やせるレーダ処理装置を得る。
【解決手段】観測諸元を管理してレーダによる観測を制御する観測制御部1と、複数の追尾処理単位の情報を格納する追尾処理データベース4と、受信信号を信号処理する信号処理部2と、目標の追尾処理を行う追尾処理部3と、観測緒元に基き、追尾処理データベース4から対象とする追尾処理単位の情報を取り出して追尾処理単位の処理時間の上限値を算出し、算出した追尾処理単位の処理時間の上限値及び観測諸元を出力する追尾処理負荷予測部5と、予め設定されているレーダが電波を受信してから追尾結果を出力するまでの時間の上限値から、前記追尾処理単位の処理時間の上限値を引いて信号処理に費やせる処理時間を算出し、算出した信号処理の処理時間及び前記観測緒元に基づいて、信号処理の処理時間を規定するパラメータを変更して信号処理部2へ出力する信号処理内容変更部6とを設けた。
(もっと読む)
人感センサおよび空調装置
【課題】 演算コストの低い人感センサおよびこれを用いた空調装置を提供する。
【解決手段】ドップラーセンサと、信号強度を記憶する記憶部と、信号強度の少なくとも一部が第1の閾値より大きいかどうかを比較する信号強度比較部と、記憶部の少なくとも一部の分散値が第2の閾値より大きいかどうかを比較する分散値比較部と、比較結果とに基づいて設置された空間の人間の状態を推定する推定部と、を有する。
(もっと読む)
目標検出装置及び目標検出方法
【課題】目標検出の誤警報の低減を図り得るレーダ装置の目標検出装置を提供する。
【解決手段】目標検出部において、事前に受信ビデオ信号からクラッタの分布を形状パラメータ及びスレッショルド算出処理部162にて推定し、さらに擬似的な目標を示すテストセルを含めた形状ペラメータに対応するスレッショルドをレーダの1スキャンごとにスレッショルドメモリ163に記憶しておき、検出判定部165により、このスレッショルドメモリ163に記憶されたスレッショルドを利用して、ワイブルCFAR処理部164による処理から目標を検出するようにしている。
(もっと読む)
ドップラセンサ装置
【課題】 定常時ノイズ幅が所定の報知閾値に達していることを報知するドップラセンサ装置を提供する。
【解決手段】 送受信回路2は、送信信号を電波として所定の検出範囲に対して送信するとともに、検出範囲で反射された電波を受信して得られた受信信号に送信信号を混合した混合信号を出力する。フィルタ部31は、混合信号から所定の周波数帯のドップラ信号を抽出して出力する。判定部32は、上記のドップラ信号に基いて検出範囲における移動物体の有無を判定する。定常検出部33は、上記のドップラ信号の信号レベルの振動の幅の定常値である定常時ノイズ幅を検出する。報知部34は、上記の定常時ノイズ幅を所定の報知閾値と比較し、定常時ノイズ幅が報知閾値以上である場合に報知を行う。使用者は、報知部34の報知の有無により、定常時ノイズ幅が報知閾値に達しているか否かを知ることができる。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】コヒーレント積分を行う場合において、干渉成分による影響を軽減した信号処理装置を提供する。
【解決手段】ソート処理部153は、振幅値に応じてデータ列を並び替える処理を行う。閾値検出部154は、ソート処理部153によって並び替えられたデータ列の中から、振幅値の小さい順に複数点のデータを選択する。そして、閾値検出部154は、選択したデータの平均値を算出し、この平均値に所定の係数αを掛けた値を閾値として算出する。ゼロ置換処理部151は、閾値検出部154から入力された閾値と、各データの振幅値とを比較する。閾値以上の振幅値を示すデータが存在した場合、そのデータ(スイープメモリ13から入力した複素信号)を0に置換し、コヒーレント積分処理部161に出力する。閾値未満の振幅値を示すデータは、スイープメモリ13から入力した複素信号をそのままコヒーレント積分処理部161に出力する。
(もっと読む)
レーダ搬送波監視装置
【課題】装置の規模を小型軽量化しつつ、レーダ信号に対する監視データの信頼性を確保し向上させたレーダ搬送波監視装置を得る。
【解決手段】進行波及び反射波のレベル測定に際し、給電線路の電気長に基づいた測定時間幅を設け、その時間幅の中でのピーク値を取得することにより、特に反射波等、発生タイミングの一定しない場合においてもそのピークレベルを確実に取得する。また、進行波電力、及び反射波電力の監視に加え、レーダ搬送波の監視に必要な、周波数及びパルス情報等の機能についても、1つのFPGA内に単一モジュール化して構成する。
(もっと読む)
追尾装置
【課題】背景画素の誤抽出を低減し、追尾目標の画像上の大きさや向きの変化に影響を受けない高精度の追尾装置を提供する。
【解決手段】観測センサで同時に観測された同一画角の距離画像と強度画像がフレーム単位で入力され、最新フレーム画像の追尾点情報を入力とし該追尾点の距離画像から得る3次元位置座標と強度画像から得る強度値を観測ベクトルとし追尾フィルタにより次フレームでの追尾目標の状態予測値を出力する追尾フィルタ装置と、前記追尾目標の状態予測値に基づく最新フレーム画像での残差2次形式、追尾予測位置との距離差分、追尾予測強度との強度差分により各画素が目標を構成する確からしさを表す目標画素指標を算出しさらにここから最新フレーム画像での目標を構成する目標領域を抽出し目標領域に含まれる画素から追尾フィルタ装置への新たな追尾点情報を算出して出力する目標検出装置を含む。
(もっと読む)
道路端検出装置
【課題】自車両が走行する道路の道路端を検出する道路端検出装置において、道路端を検出する際の精度を向上できるようにする。
【解決手段】認識システムでは、道路端位置認識処理にて、自車両の進行方向における道路端の候補となる複数の検出点、および自車両の挙動の検出結果を取得する(S110)。そして、自車両が各検出点の真横まで移動したと仮定したときにおける自車両の位置に対する各検出点の位置を表す通過位置を、自車両の挙動に基づいて検出点毎に演算し、演算された各通過位置を、自車両と各検出点との距離に応じて予め設定された単位距離毎に複数のグループに振り分けたヒストグラムを生成する(S120)。このヒストグラムにおいて最も多くの通過位置が振り分けられたグループの代表値を自車両に対する道路端の位置として設定する(S130)。
(もっと読む)
位置決め装置の異常変位を判定するためのシステム、方法、および装置
【課題】 空間内の位置決め装置が変位されたかどうかを判定するための技術的解決法を提供する。
【解決手段】 本発明の実施例では、空間内の位置決め装置が変位されたかどうかを判定するためのシステム、方法、および装置が提供される。具体的には、測距信号を発する機能を有するタグと、当該タグからの測距信号に基づいて、当該タグが位置する位置点の位置決め装置に対する相対座標を取得するように構成された位置決め装置と、空間内の位置点の相対座標、位置決め装置の較正パラメータ、および信頼済み絶対座標に基づいて、位置決め装置が変位されたかどうかを判断するように構成されたサーバとを備えることのできるシステムが提供される。本発明の実施例により、位置決め装置が変位されたかどうかの判定を正確、包括的、かつリアルタイムに行うことができる。
(もっと読む)
位置推定装置およびプログラム
【課題】無線信号を送信する送信装置の位置を高精度で推定することのできる位置推定装置およびプログラムを得る。
【解決手段】入館管理装置20により、RFIDタグ52の位置を送信された無線信号に基づいて推定し、かつ当該推定対象とする領域を撮影するカメラ40によって得られた画像情報に基づいて前記領域に存在する人の位置を導出し、少なくとも推定したRFIDタグ52の位置を入力情報とし、補正後のRFIDタグ52の位置を示す物理量を出力情報とし、当該出力情報の正解情報を用いた学習機能を有するニューラル・ネットワークにより得られた物理量を用いて、推定したRFIDタグ52の位置を補正する一方、位置の推定対象としたRFIDタグ52の所持者が、位置の導出対象とした人とみなされる予め定められた条件を満足した場合に、導出した前記人の位置を示す物理量を前記正解情報としてニューラル・ネットワークを学習させる。
(もっと読む)
目標物探知装置および目標物探知方法
【課題】目標物が停止したのか失探したのかを判別して、追尾の誤りを削減することを目的とする。
【解決手段】ドップラ効果を利用して目標物が探知するレーダ装置の監視領域を分割した複数の分割範囲ごとに、電波到達可能であるか否かを示す電波到達可否情報と、ドップラ効果が有るか無いかを示すドップラ情報を関連付けて記録し、最後に探知された目標物の追尾結果を示す追尾情報と今回探知した目標物の探知結果を示す探知情報を用いて、最後に探知した目標物と今回探知した目標物とを関連付け、追尾処理が中止された対象の最後に探知された目標物の追尾情報に含まれる位置情報を参照して、最後に探知された目標物が含まれる分割範囲を検知し、該分割範囲において電波到達可能か否かとドップラ効果の有無を判定して、最後に探知された目標物が停止したかを判定する目標物探知装置および目標物探知方法である。
(もっと読む)
レーダ装置、及び方位検出方法
【課題】異なるターゲットに対応する周波数スペクトルが重なった場合でも、各ターゲットの方位を正確に算出可能なレーダ装置に関する技術を提供することを課題とする。
【解決手段】送信波が静止ターゲットと移動ターゲットを含むターゲットで反射された反射波を少なくとも2つの受信アンテナの受信信号として受信し、送信信号と受信信号から生成されるビート信号のピーク周波数の位相差を算出し、この位相差に基づいてターゲットの方位を算出する。ターゲットの方位の算出は、方位算出部で算出された静止ターゲットの位相差を記憶領域に記憶しておき、複数のターゲットのピーク周波数が重なるか否かを予測し、記憶される位相差に基づいて、ピーク周波数が重なる際の静止ターゲットの予測位相差を算出し、算出された位相差と静止ターゲットの予測位相差に基づいて移動ターゲットの予測位相差を算出し、ターゲットの方位を算出する。
(もっと読む)
周波数変調レーダシステム内の干渉を抑制するためのシステムおよび方法
本発明は、第1のマイクロ波放射を放出するための放出器と、第1のマイクロ波放射から引き出される第2のマイクロ波放射を検出するための受信機と、放出器および受信機に接続された制御システムとを有するシステムに関している。第1のマイクロ波放射は、複数の時間ポイントで、これらの時間ポイントに割り当てられた異なる周波数で放出される。時間ポイントと周波数の相関は、ランダムまたは擬似ランダムである。別法または追加として、時間ポイントにおける放出または受信のための時間期間の長さもランダムまたは擬似ランダムである。本発明は、さらに、周波数変調レーダシステム内の干渉を抑制するための方法に関している。 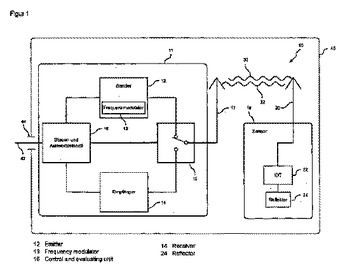 (もっと読む)
(もっと読む)
多目標追尾装置
【課題】早期にかつ正確に目標航跡を確立させる多目標追尾装置を得る。
【解決手段】サンプリング時刻毎の観測値数の履歴から目標数の仮説を立て、仮説の信頼度を計算することにより目標数を推定する目標数推定部3と、当該信頼度により目標数を決定する目標数確定判定部4と、決定された目標数に応じて多目標相関決定追尾処理部7の仮航跡の候補を抽出し、当該候補の最新の平滑値の尤度を過去数サンプリング時刻分の観測値に対して計算し、最も尤度が大きい仮航跡を選択して航跡を確立する航跡確立再判定部5とを備え、多目標相関決定追尾処理と並行して目標数推定を行って、分離目標の存在が確認されたら、多目標相関決定追尾処理で生成された仮航跡群から最も確度の高い航跡を抽出して確立させることによって、早期にかつ正確に目標航跡を確立させる。
(もっと読む)
UWBセンサシステム及びリーダ装置
【課題】1つの受信系を用いて、リーダが、レーダの人体検知距離を数メートル程度確保しつつ、無線タグのIDを取得すること。
【解決手段】UWB送信部310は、IR-UWBのパルス系列を用いて周期的且つ間欠的であって、リーダ300に固有のユニークワードを示すUW信号を送信し、UWB受信部320は、タグ200のタグIDを示すID信号と、UW信号がタグ200を装着した人体で反射された人体エコーと、を受信し、タグID検出部340は、ID信号からタグ200のタグIDを検出し、相関受信部330は、受信信号の遅延プロファイルを算出し、2次元プロファイル推定部370は、遅延プロファイルを用いて遅延時間領域及びドップラシフト領域の2次元電力スペクトラムを算出し、測距・生体検知部380は、2次元の電力スペクトラムを用いて人体エコーを検出する。ここで、UWB送信部310は、タグ200のタグIDが検出された後に、UW信号を送信する。
(もっと読む)
パッシブ型飛しょう体飛しょう制御装置および制御方法
【課題】TDOAとFDOAを観測し、目標の位置をパッシブに測位するパッシブ型飛しょう体において、測位精度の向上を図る。
【解決手段】既知の送信源から照射され目標に当たって散乱した散乱波と、既知の送信源から直接到来する直接波との両方を受信することでTDOAおよびFDOAを観測し、自らは電波を放射することなく目標を測位して自らの飛しょう経路を目標へと向かうように制御する飛しょう制御部(14)を備えたパッシブ型飛しょう体飛しょう制御装置であって、自機、送信源、目標の幾何学的配置からGDOPを演算するとともに、ISO−TDOAとISO−FDOAの直交度を推定し、現在の飛しょう体による測位誤差の定量的な判断指標を生成するGDOP演算部(18)をさらに備える。
(もっと読む)
レーダー信号を検出するための方法
【課題】レーダー信号を検出するための方法を提供する。
【解決手段】本発明によるレーダー信号の検出方法は、あらかじめ定めた基準時間または基準パルス収集個数に基づいて、複数のパルスを収集する段階(S100)と、複数のパルスをパルス幅に基づいて、類似パルス別にグループ化する段階(S300)と、全体グループをショートパルスタイプまたはロングパルスタイプ別に分類し、タイプ別グループ数を判断する段階と(S600)、タイプ別グループ数に基づいて、レーダー信号の存否を判断する段階(S700)と、を含みうる。
(もっと読む)
101 - 120 / 535
[ Back to top ]