
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
121 - 140 / 535
レーダ画像処理装置
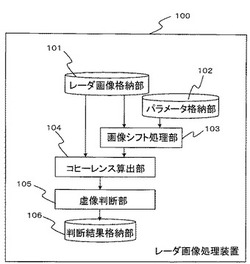
【課題】この発明は、アジマスアンビギュイティ以外の種類の虚像についても検出することができるレーダ画像処理装置を提供する。
【解決手段】パラメータ格納部102には、既知の1分解能を最小単位として処理対象画像をずらす大きさであるシフト量や、処理対象画像をずらす方向等を表すシフトパラメータが予め格納されている。画像シフト処理部103は、パラメータ格納部102に格納されたシフトパラメータのシフト量に基づいて、レーダ画像格納部101に格納された処理対象画像をシフトする。コヒーレンス算出部104は、シフト前の処理対象画像と、シフト後の処理対象画像とについて、相関の度合いを示すコヒーレンスを算出する。虚像判断部105は、コヒーレンス算出部104によって算出されたコヒーレンスに基づいて、処理対象画像内に虚像が存在しているか否かを判断する。
(もっと読む)
人体検知装置

【課題】 ドップラ信号を利用した人体検知装置において、少ない演算量で、人の行動状態を的確に把握する。
【解決手段】 人体によって反射された伝播波のドップラ信号を利用した人体検知装置であって、人体に向けて伝播波を放射する伝播波発信部と、人体によって反射された伝播波を受信する伝播波受信部と、上記伝播波発信部によって放射された伝播波及び上記伝播波受信部によって受信された伝播波に基づいてドップラ信号を生成するドップラ信号生成部と、このドップラ信号生成部によって生成されたドップラ信号を解析してドップラ信号の振幅を算出するドップラ信号解析部と、上記ドップラ信号の振幅が上記第一振幅閾値を上回った後に上記第一振幅閾値を下回ると、その時点よりも所定期間前の上記ドップラ信号の振幅に基いて人体までの距離を推定し、その推定結果に基いて人体の行動状態を判定する行動状態判定部と、を有することを特徴とする。
(もっと読む)
信号処理装置、レーダ装置及び信号処理プログラム
【課題】受信信号の種類に応じて柔軟に信号処理を行うことが可能な信号処理装置を提供する。
【解決手段】レーダ指示機3は、受信信号取得部13と、種類識別処理部18と、種類別信号処理部20と、を備える。受信信号取得部13は、レーダアンテナ11が受信した受信信号を取得する。種類識別処理部18は、受信信号の種類を識別する。種類別信号処理部20は、受信信号を種類ごとに抽出する。また、前記種類別信号処理部20は、抽出された受信信号に対して、受信信号の種類ごとに個別の信号処理を行う。
(もっと読む)
データ処理装置、動作認識システム、動作判別方法、及びプログラム
【課題】ドップラーセンサを用いて、加速度の大きさに依存せず対象物の動作を認識することが可能なデータ処理装置、動作認識システム、動作判別方法、及びプログラムを提供する。
【解決手段】データ処理装置100は、認識対象物20に対して放射した電磁波である放射波の周波数と、上記放射波が上記認識対象物により反射した反射波の周波数との差分の周波数を有するドップラーセンサ出力信号を取得するデータ取得部102と、上記ドップラーセンサ出力信号の特徴を示す特徴量を抽出する特徴量抽出部106と、上記特徴量に基づいて、上記認識対象物の動作を判別する動作判別部108と、を有する。
(もっと読む)
位相情報を用いたサブミリ波レーダー
サブミリ波長アクティブレーダーシステム(10、20、30)のための信号処理装置(30)は、レーダーシステムによって受信されダウンコンバートされた信号を処理する。このダウンコンバート信号は、時変振幅とコンテンツに依存する周期的成分を有する位相成分とを有する視野中の所定のピクセルに対応する。コンテンツに関する情報は、周期的成分から識別される。振幅のみよりも位相を使用することによって、ダウンコンバート信号中に追加の情報が存在する。位相は、振幅のみよりも、オブジェクト、バックグラウンド及び大気条件のような、コンテンツ中の変化により敏感である。位相情報は、周期的成分が保持されることを可能とする。この周期的成分は、コンテンツフラター、サブミリ波定常波における変化、および、もし表面層が複数の半波長の厚さを有している場合、サブミリ波放射の受信された反射中における干渉縞に原因して、コンテンツに特有であり得る。 (もっと読む)
最適位置算出装置、最適位置算出方法およびプログラム
【課題】任意のタイミングで、高精度、かつ、軌道が滑らかな航空機情報を表示する技術を提供する。
【解決手段】最適位置算出装置20は、複数のセンサのそれぞれによって観測された観測データに基づく航空機情報を記憶する航空機情報記憶部210と、前記複数のセンサのうち2以上のセンサを優先センサとして特定するための優先センサ情報を各観測領域に対応付けて記憶する優先センサ情報記憶部200と、航空機の表示位置の更新タイミングにおいて、前記優先センサ情報に基づいて、複数の前記航空機情報のなかから、前記優先センサによって観測された最新の観測データに基づく前記航空機情報を抽出するセンサ選択部240(航空機情報抽出部)と、抽出された前記航空機情報に基づいて、前記更新タイミングにおける航空機の最適位置を算出する最適位置算出部250と、前記最適位置を出力する表示部260(出力部)とを備える。
(もっと読む)
車両の周囲状況を表す方法
本発明は、車両(5)の周囲状況を表す方法に関しており、ここでは、車両(5)の周囲にある対象体をセンサによって検出し、それぞれ検出した対象体を2つの座標点(11,13)と、各座標点(11,13)に割り当てられた位置曖昧さ(15)とによって表し、これらの座標点(11,13)および位置曖昧さ(15)をインタフェースにデータとして記憶し、このインタフェースには車両(5)の走行アシストシステムがアクセス可能である。本発明はさらに車両(5)と対象体との衝突確率を求める方法に関しており、ここではまず上記の車両(5)の周囲を表す方法を使用して車両(5)の周囲を表し、つぎのステップでは上記の位置曖昧さ(15)を考慮して、この車両(5)が走行するチューブ状走行パス(23)を求め、続いて対象体とチューブ状走行パス(23)との重なり度を求め、ひいては衝突確率を求める。 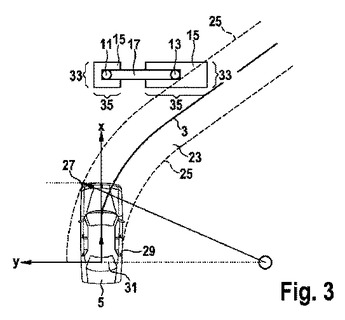 (もっと読む)
(もっと読む)
レーダ装置
【課題】複数の対象物との相対距離、及び相対速度をそれぞれ測定することのできるレーダ装置を提供する。
【解決手段】ステップチャープ法で測定した相対距離に基づき、それぞれの対象物との相対距離を最尤推定するための推定範囲を決定する。そして、測定するときに受信した反射信号と送信信号とを混合した混合信号を示す信号関数を生成する。推定範囲内で生成した仮定距離に基づき信号関数を示す関数の候補となる信号関数候補を生成し、生成した信号関数候補の中で信号関数を示す信号関数候補を特定する。特定した信号関数候補に代入した略同一の仮定距離を対象物との相対距離として最尤推定する。さらに、推定した相対距離に基づき対象物との相対速度も推定する。
(もっと読む)
センサバイアス推定装置
【課題】バイアスベクトル推定値を高精度に算出可能なセンサバイアス推定装置を得る。
【解決手段】それぞれのセンサが、観測値と予測値とに基づいて相関観測値を算出するとともに、相関観測値に基づいてセンサ航跡を算出し、算出結果を出力する装置に適用され、複数のセンサ10、20のバイアスを推定するセンサバイアス推定装置であって、センサ航跡に基づいて、時刻同期および航跡相関を実行し、同一航跡と判定されたセンサ航跡の組を出力する同期処理部30と、同一航跡と判定されたセンサ航跡の組に対してバイアス格子点探索処理を実行し、バイアス推定値を算出するバイアス格子点探索処理部40と、相関観測値に基づいて、バイアス推定フィルタ処理を実行し、バイアスベクトル推定値を算出するバイアス推定フィルタ処理部60とを備え、バイアス推定フィルタ処理部60は、バイアス推定値をバイアスベクトル推定値の初期値として設定するものである。
(もっと読む)
車載用レーダ装置
【課題】レーダ測定座標系の軸ずれ角度の推定処理に必要な演算資源量を減らし、装置サイズを小さくすることができる車載用レーダ装置を得る。
【解決手段】ターゲット情報として方位角度と相対ドップラー速度を測定する測定部14と、ターゲットの相対ドップラー速度と自車の走行速度及び自車の旋回速度に関する条件を満足するターゲット情報を抽出し、新たなターゲット情報として、抽出されたターゲット情報のうち、方位角度と、相対ドップラー速度を自車の走行速度で除算した速度比とを蓄積する抽出蓄積部15と、抽出蓄積部に蓄積されたターゲット情報を読み出して、レーダによる測定座標系の軸ずれ角度をターゲットの方位角度の2次多項式に基づいて推定する軸ずれ角度推定部16とを備える。
(もっと読む)
レーダ装置
【課題】ターゲットの検出数を可及的に多く維持しながらも、検出時においてターゲットが移動している場合でもその検出をより的確に行えるレーダ装置を提供する。
【解決手段】複数の送信アンテナを有する送信アンテナ群と、複数の受信アンテナを有する受信アンテナ群と、前記送信アンテナ群の各送信アンテナから送信波を順次切り替えて送信する送信切替手段と、を備えるレーダ装置において、送信波の送信が順次行われるときに、前記各送信アンテナの送信波がターゲットで反射されその反射波を受信する前記受信アンテナ群を、該送信アンテナに対応する仮想的な仮想サブアレーとして機能させる。これにより、複数の仮想サブアレーに対応する仮想相関値に対して、送信切替が行われた前記送信アンテナのそれぞれの、前記受信アンテナ群に対する相対位置に基づいた空間平均処理を施し、ターゲットの検出を行う。
(もっと読む)
干渉波検出装置、レーダ装置及び干渉波検出方法
【課題】レーダ受信信号から干渉波による影響を高精度に検出する。
【解決手段】対象点選択部173は、観測対象から反射された所定ヒット数のレーダ受信信号から、少なくとも1つの受信信号を選択する。平均電力算出部174は、当該所定ヒット数のレーダ受信信号から、当該レーダ受信信号の受信電力の平均値を算出する。選択された受信信号の電力値と、当該平均値との差分が算出され、当該差分が所定の閾値以上である場合に、干渉判定部175が、選択された受信信号に干渉波が混入していると判定する。
(もっと読む)
気象レーダシステムとその降水強度算出方法及びプログラム
【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を送信し、その反射波を受信する送受信装置11〜16と、その受信信号から偏波毎の受信電力を算出する信号処理装置17とを備える気象レーダシステムにおいて、データ変換装置19は、偏波毎の受信電力をもとにレーダ反射因子(ZH,ZV)及び差分レーダ装置反射因子(ZDR)を算出し、受信電力の偏波間位相差(φDP)をもとに算出された比偏波間位相差(KDP)をもとに低分解能領域毎の平均降水強度(Rave)を算出し、レーダ反射因子(ZH)と降水強度(R)との関係式(ZH=B×Rβ:B,βは定数)における第1定数(B)を差分レーダ装置反射因子(ZDR)から算出し、さらに平均降水強度(Rave)及びレーダ反射因子(ZH)をもとに第2定数(β)を推定し、上記関係式に基づいて第1空間分解能の降水強度(R)を算出する。
(もっと読む)
目標検出装置
【課題】ワイブル分布に従ったクラッタ等が存在する環境において受信されたレーダ信号中から、検出確率を低下させることなく一定の誤警報確率のもと、高速に目標を検出する、小型かつ低コストな目標検出装置を得る。
【解決手段】ワイブル分布の確率密度関数における形状パラメータcを算出する際に、検波信号xの平均値<x>と検波信号xの自乗平均値の平方根√<x2>を用いず、これらに替えて検波信号xの自乗値<x>2と検波信号xの自乗平均値<x2>を用いることによって、回路規模/演算コストの増大要因となる平方根算出演算を含まずに形状パラメータcを算出する。
(もっと読む)
気象レーダシステムとその降水強度算出方法及びプログラム
【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を送信し、その反射波を受信する送受信装置11〜16と、その受信信号から偏波毎の受信電力を算出する信号処理装置17とを備える気象レーダシステムにおいて、データ変換装置19は、受信電力をもとに高分解能でレーダ反射因子(Z)を算出し、受信電力の偏波間位相差(φDP)をもとに低分解能で比偏波間位相差(KDP)を算出し、比偏波間位相差(KDP)をもとに低分解能領域毎の平均降水強度(Rave)を算出し、レーダ反射因子(Z)と降水強度(R)との関係式(Z=B×Rβ:B,βは定数)における第1定数(B)を、レーダ反射因子(Z)をもとに算出し、第1定数(B)、平均降水強度(Rave)及びレーダ反射因子(Z)をもとに第2定数(β)を推定し、上記関係式に基づいて、第1空間分解能の降水強度(R)を算出する。
(もっと読む)
画像処理方法、画像処理装置及びひび割れ検知システム
【課題】電磁波を用いて撮像された透視画像から被撮像体に生じたひび割れを高い精度で検知することを課題とする。
【解決手段】電磁波を用いて撮像された構造物の透視画像の各画素にそれぞれ対応し、ニューロン間の相互作用を対称とする2次元のニューロン配列を備え、各ニューロンにおいて、エッジ度算出部13aにより対応画素のエッジ度を算出し、画素連結度算出部13bにより周辺画素に対する対応画素の連結度を算出し、エネルギー値算出部13cによりエッジ度と連結度とに基づいてニューロンのエネルギー値を算出し、エネルギー値更新部13dにより既存のエネルギー値を更新して、更新後のエネルギー値が、同一列における他ニューロンのエネルギー値以上の場合には、ニューロン値を1に更新し、他ニューロンのエネルギー値未満の場合には、0に更新する。
(もっと読む)
信号処理装置
【課題】本発明は、目標から到来した波動信号を処理し、クラッタの除去または抑圧を図る信号処理装置に関し、構成が大幅に複雑化することなく、誤警報確率を低く設定し、かつ安定に維持できることを目的とする。
【解決手段】目標から到来する波動信号と前記波動信号の瞬時値の平均値との差を求める信号抽出手段と、前記波動信号の瞬時値と、所定の係数と前記平均値との積とを比較する比較手段と、前記波動信号の瞬時値が前記積より大きい場合と小さい場合とに、それぞれ前記波動信号の瞬時値と前記差とを選択し、前記選択された瞬時値および差の列を前記目標の識別に供する選択手段とを備える。
(もっと読む)
レーダ装置
【課題】物体の左右方向及び上下方向の少なくとも一方の位置を正確に検出することの可能なレーダ装置の提供。
【解決手段】レーダ装置100は、左右方向に配列され、少なくとも一部が上下方向にずれて配設された複数(ここでは、3個)の素子アンテナ(21、22、23)を有する受信アンテナ2と、位置検出ECU(5)と、を備える。また、位置検出ECU(5)は、前記複数の素子アンテナ(21、22、23)で受信された受信信号の位相差に基づいて、物体TGの上下方向位置P1を検出する第1位置検出部53と、上下方向位置P1の履歴に基づいて、該上下方向位置P1を補正して、補正後の上下方向位置である第1補正位置P1Aを求める第1位置補正部(54)と、を備える。
【選択図】図2 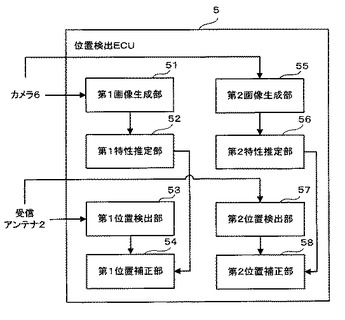 (もっと読む)
(もっと読む)
イベント検出装置
【課題】エリアに応じて検出するイベントを強調したり、マスク(無視)したりして、小さな変化のイベントを検出することもできるし、大きな変化のイベントをマスクすることもできるイベント検出装置を提供すること。
【解決手段】送信機が送信した電波を受信する複数のアンテナ21と、該複数のアンテナによって受信した信号を受信ベクトルとして該受信ベクトルから相関行列を演算する相関行列演算手段22と、該相関行列演算手段によって演算された相関行列に信号部分空間を分割する写像行列をかけるフィルタ手段23と、該フィルタ手段によって前記写像行列をかけられた相関行列を固有値展開して得られる固有値に関する固有ベクトルを演算する固有ベクトル演算手段24と、該固有ベクトル演算手段によって演算された前記固有ベクトルの経時変化を検出してイベントを検出するイベント検出手段25とを有するイベント検出装置。
(もっと読む)
地盤変化の調査方法
【課題】より正確な調査結果が得られる地盤変化の調査方法を提供する。
【解決手段】本発明は、地盤上の複数の調査ポイントPSiの座標の生の変化量ΔBX(PSi)、及び、地盤上の少なくとも1の参照ポイントPRiの座標の生の変化量ΔBX(PRi)を提供する工程と、参照ポイントの座標の真の変化量ΔRX(PRi)を決定する工程S110と、調査ポイントの座標の生の変化量、参照ポイントの座標の生の変化量、及び、参照ポイントの座標の真の変化量に基づいて、調査ポイントの座標の補正された変化量ΔCX(PSi)を算出する工程S130と、を備えている。
(もっと読む)
121 - 140 / 535
[ Back to top ]