
Fターム[5J070AH19]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560)
Fターム[5J070AH19]の下位に属するFターム
二次元のもの (25)
Fターム[5J070AH19]に分類される特許
1 - 20 / 535
目標追尾装置
障害物検出装置
追尾装置
【課題】高分解能センサ及び低分解能センサによる航跡に対して正確な割り当てを行うことで、真の目標数分の航跡を生成する。
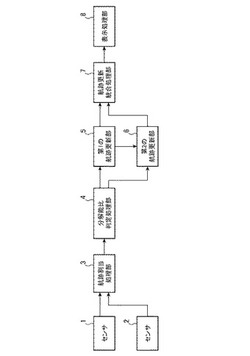
【解決手段】目標を観測して航跡を生成するセンサ1と、センサ1より低分解能であり、目標を観測して航跡を生成するセンサ2と、センサ1,2により生成された航跡を1対1で割り当てる航跡割当処理部3と、割当結果に応じて、センサ1により生成された航跡を、センサ2により生成された対応する航跡に基づいて更新する第1の航跡更新部5と、割当結果に応じて、センサ1により生成された未割当ての航跡を、センサ2により生成された複数の航跡に基づいて更新する第2の航跡更新部6と、センサ1,2の分解能比に基づいて、第1,2の航跡更新部5,6の動作を制御する分解能比判定処理部4と、更新された航跡を統合する航跡更新統合処理部7とを備えた。
(もっと読む)
周辺物体検出装置

【課題】レーダセンサを利用した周辺物体検出において検出性能を向上させる周辺物体検出装置を提供することを課題とする。
【解決手段】レーダセンサを利用し、車両周辺の周辺物体の過去の検出結果と今回の検出結果に基づいて周辺物体を検出する周辺物体検出装置であって、レーダセンサによるセンサ情報に基づいて周辺物体を検知した方向と周辺物体を検知しなかった方向の情報(例えば、周辺物体の存在確率)を取得し、各方向の情報に対して信頼度(例えば、遮蔽由来信頼度)を付与し、各方向の情報と付与した各信頼度に基づいて周辺物体の情報を検出し、特に、周辺物体を検知しなかった方向の情報に付与する信頼度を周辺物体を検知した方向の情報に付与する信頼度よりも低い信頼度とすることを特徴とする。
(もっと読む)
ドップラーレーダシステム、及び物体検知方法
【課題】受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上する。
【解決手段】本発明に係るドップラーレーダシステム100は、送信アンテナ120と、複数の受信アンテナ121と、目標物体150に含まれる複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部105と、第1間隔を有する第1分割枠を用いて、測定点の第1重心116aを算出する第1重心算出部106aと、第1間隔より狭い第2間隔を有する第2分割枠を用いて、測定点の第2重心116bを算出する第2重心算出部106bと、複数の第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの第2重心116bを目標物体150の位置に決定する重心決定部107とを備える。
(もっと読む)
車両用歩行者検知装置、車両用歩行者保護システム
【課題】歩行者をより確実に追尾することが可能な車両用歩行者検知装置等を提供すること。
【解決手段】車両に搭載される車両用歩行者検知装置であって、車両周辺に放射した電磁波が障害物で反射されて前記車両に帰還した反射波を受信する受信手段と、前記受信手段が受信した反射波のデータを格納する記憶手段と、前記記憶手段に格納された反射波のデータを参照して前記反射波の強度の分散を算出し、該算出した反射波の強度の分散が基準値以上である場合に前記障害物が歩行者であると判別し、前記障害物が歩行者であると判別した後、同一の障害物を歩行者とみなして該歩行者の位置に関する情報を出力する制御手段と、を備える車両用歩行者検知装置。
(もっと読む)
受信装置
【課題】受信信号の処理効率を向上して負荷を軽減する。
【解決手段】受信装置は、検出手段と、デコード手段と、相関判定手段とを備える。検出手段は、受信信号からモードS応答のプリアンブルを特定する所定のパルスパターンの有無を検出する。デコード手段は、検出手段がモードS応答のプリアンブルを検出すると、プリアンブルとデータブロックで構成されるモードS応答をデコードする。相関判定手段は、検出手段がモードS応答のプリアンブルを検出すると、プリアンブルに続くデータブロックに含まれる各パルスの位相値のレベルと、プリアンブルの位相値のレベルとの相関を判定し、相関結果が所定条件のとき、プリアンブルに続くデータブロックのデコードを中止させるデコード中止通知をデコード手段に出力する。
(もっと読む)
等価時間サンプリング装置、オシロスコープ、レーダ装置、および、等価時間サンプリング方法
【課題】一部に時間的に変化する領域を含む対象信号を正確にサンプリングすること。
【解決手段】周期性を有する対象信号を等価時間サンプリング方式に基づいてサンプリングする等価時間サンプリング装置1において、対象信号の周期に対応する一定期間に亘って対象信号を所定の間隔でサンプリングするとともに、当該一定期間のサンプリングをフィールドとした場合に、当該フィールドを複数回実行するサンプリング手段(サンプリング部2)と、対象信号において変化する領域を検出する検出手段(制御部3)と、検出手段の検出結果に基づいて、サンプリング手段を制御し、変化する領域に対応するフィールドの開始のタイミングを調整する調整手段(調整部5)と、を有することを特徴とする。
(もっと読む)
移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラム
【課題】移動体がすれ違うなどの観測値と対象物の対応関係が曖昧になるシーンでも、位置推定精度の低下を招かず、対象物の移動経路の推定誤りを引き起こさない、移動体位置推定装置及び方法、並びに、移動体位置推定プログラムを提供する。
【解決手段】識別情報割り当て手段103は、移動体の識別情報と位置情報を低頻度で出力する第1の観測手段101から観測値が得られる時点Aと、時点Aの次に観測手段101から観測値が得られる時点B、及び、時間区間ABにおいて、移動体の位置情報を高頻度で出力する第2の観測手段102から得られる観測値の系列に対して、時点A、Bにおける第1の観測手段101の観測値と第2の観測手段102の観測値の位置の近さが最小になるように、及び、時間区間ABにおける観測手段102の観測値の移動量の合計が最小になるように、第2の観測手段102の観測値に対して第1の観測手段の観測値に含まれる識別情報を割り当てる。
(もっと読む)
探知測距装置および探知測距方法
【課題】複数の送信素子および複数の受信素子を有する探知測距装置の処理時間の短縮と回路の簡略化とを図る。
【解決手段】探知測距装置は、互いに異なるキャリア周波数を有するM個のプローブ信号を生成する信号生成回路と、M個のプローブ信号を送信するM個の送信素子と、ターゲットからのエコー信号を受信するN個の受信素子と、N個の受信素子のそれぞれに対して設けられ、M個のプローブ信号の中の少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、復調エコー信号を周波数領域でフィルタリングしてM個のプローブ信号に対応するM組のデータ信号を生成するN個の復調回路と、N個の復調回路によって生成されるM×N組のデータ信号に基づいてターゲットを探知する信号処理部と、を有する。
(もっと読む)
レーダ装置およびレーダ装置の性能低下判定方法
【課題】短時間で高精度な性能低下判定処理を実現することができるレーダ装置およびレーダ装置の性能低下判定方法を得る。
【解決手段】レーダ装置1の検知性能に関する性能低下判定処理を実施する性能低下判定部50は、測定部40で得られた測定結果を加工して、加工済反射物体を生成する測定結果加工部51と、相対距離の範囲と方位角度の範囲とによって形成されるエリア毎に、加工済反射物体の反射波レベルの代表値を計算し、エリア毎反射波レベル代表値を算出するエリア毎反射波レベル代表値計算部52と、エリア毎に、エリア毎反射波レベル代表値とエリア毎反射波レベル代表値閾値とを比較して、エリア毎性能低下度を算出するエリア毎性能低下度計算部53と、各エリアについて、エリア毎性能低下度を組み合わせて性能低下判定結果を出力するエリア毎性能低下度組合せ判定部54とを有する。
(もっと読む)
受信装置
【課題】本発明は、UWB通信方式を用い、消費電力をより低減し得る受信装置を提供する。
【解決手段】本発明の受信装置Rxは、一定の時間間隔で配列された短パルス波であるウルトラワイドバンド方式の送信信号を送信する送信装置Txから送信された短パルス波が物体に当たって反射した反射波を受信する受信装置Rxであって、受信信号を周波数変換して中間信号を出力する伸長器31と、中間信号から、目的とするパルスの識別および到来時刻識別を行ってパルス検出信号を出力するパルス検出器33と、パルス検出信号に基づいて物体の運動の有無を検出する物体運動検出部とを備え、伸長器31は、受信信号に含まれる短パルス波の発生タイミングに同期して間欠動作する発振器31aを含み、物体運動検出部は、反射波を複数回受信することによって得られた各受信強度の分散値に基づいて前記物体の運動の有無を検出する。
(もっと読む)
移動物体監視システム
【課題】熱線センサ等の移動物体センサとユーザが携帯するICタグとで監視エリアにおける不審者を検知する監視システムにおいて移動物体センサが人物を検出したときに、単に当該監視エリア内にてICタグ等の携帯装置の存在を検知するだけでは、検出された人物が当該携帯装置を身につけているとまでは判断できない。
【解決手段】リーダ部22及びタグ検出手段42は、無線タグ16が発した無線信号を受信して、無線タグ16の位置を検出する。リンク処理手段44は、センサ部20が検知した人物の位置と無線タグ16の位置とを照合してそれらを対応付ける。確度判定手段46は人物と無線タグ16との対応関係の持続性に基づいて、当該人物が無線タグ16を帯同している確度を判定する。監視装置は確度を所定の閾値と比較することにより人物が無線タグ16を帯同しているか否か判定する。
(もっと読む)
レーダ装置、誘導装置及び目標追随方法
【課題】検出した移動速度に速度誤差が含まれている場合であっても、合成帯域レーダで高分解して検出した測定値をMTTで正確にトラッキングすることが可能なレーダ装置を提供する。
【解決手段】レーダ装置は、合成帯域レーダ、速度トラッキング部、誤差算出部、誤差変換部、レンジ修正部及び複数部位トラッキング部を具備する。合成帯域レーダは、目標で反射された反射波を受信し、受信した反射波に基づいて、目標の速度測定値を測定し、目標内の複数の部位毎のレンジ情報を検出する。速度トラッキング部は、過去の速度測定値に基づいて速度推定値を算出する。誤差算出部は、速度推定値と速度測定値との差から速度誤差を算出する。誤差変換部は、速度誤差をレンジ誤差に変換する。レンジ修正部は、検出されたレンジ情報をレンジ誤差に基づいて修正する。複数部位トラッキング部は、修正したレンジ情報に基づいて、目標内の複数の部位毎にトラッキングを行う。
(もっと読む)
移動物体検出装置、移動物体検出方法及び移動物体検出用コンピュータプログラム
【課題】レーダの検知範囲内に存在する静止物体を移動物体として誤検出することを抑制可能な移動物体検出装置を提供する。
【解決手段】移動物体検出装置(1)は、レーダ(2)から、そのレーダからの距離とその距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信するインターフェース部(11)と、複数の計測データのそれぞれから第1の閾値以上となる受信レベル信号を検出し、レーダからの距離ごとに、第1の閾値以上となる受信レベル信号の出現頻度を表す背景値を求める背景データ更新部(21)と、計測データ中で第1の閾値よりも高い第2の閾値以上の強度を持つ受信レベル信号に対応する距離にある物体のうちで、背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する移動物体検知部(22)とを有する。
(もっと読む)
目標運動推測システム及び方法
【課題】各探信の度に目標の速度及び該速度の時間変化を取得できる目標運動推測システム及び方法を提供する。
【解決手段】未知のパラメータである目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、該未知のパラメータ数と同数以上のセンサの観測データから得られる目標のドップラー速度を成分とするドップラーベクトルを生成し、さらに各センサの観測データから得られる目標の方位及び該目標からの波の発信時刻を用いて未知のパラメータ数と同数の成分を有する方位行列を生成する。そして、速度パラメータベクトルをドップラーベクトルと方位行列の乗算結果で示す連立方程式を構築し、この連立方程式を解くことで、未知のパラメータである目標の速度成分及びその時間変化成分を求める。
(もっと読む)
車列長測定装置、車列長測定方法及び車列長測定用コンピュータプログラム
【課題】特殊な車両及び車両を後方から撮影するカメラを用いずに、車両の列の長さを測定できる車列長測定装置を提供する。
【解決手段】車列長測定装置は、所定の検知範囲内の車両の前面に対向して設置されたセンサから取得したセンサ信号に基づいて車両を検知し、検知された車両の位置及び速度を求める車両検知部21と、検知された車両のうち、センサに接近中でかつ最も近くを走行中の第1の車両の位置及び速度の変化から、第1の車両の停止位置を推定する停止位置推定部24と、推定された停止位置よりも車間距離だけセンサに近い位置を停車中の車両の列の最後尾と推定することで、停車中の車両の列の長さを求める車列長推定部25とを有する。
(もっと読む)
物標検出装置,壁判定方法
【課題】車両の周囲に存在する物体を検出する物標検出装置において、壁状の静止物体が移動物体として誤認識される頻度を低減する。
【解決手段】探査周期毎に測距データを取得し(S100)、取得した測距データをクラスタリング(S110)し、自車両が停止中ではない場合(S120-N)、クラスタが単一の反射点からなる場合、即ち、クラスタが示す物標が壁であるか否かを判定できない場合(S140-N)、または、クラスタが複数の反射点からなり(S140-Y)、かつ同一クラスタに属する二つの反射点間を結ぶ直線の傾き(基準方向と交差する角度)Yが許容壁範囲内(X−ΔX≦Y≦X+ΔX)にある場合、即ち、クラスタが示す物標が壁であると判定された場合(S150,S160-Y)、そのクラスタを、トラッキング処理や移動/停止判定の処理対象から除去する(S170)。
(もっと読む)
レーダ装置及びレーダ装置の動作方法
【課題】検出性能向上と妨害波誤検出確率の低下を両立するレーダ装置及びレーダ装置の動作方法を提供する。
【解決手段】複数のレーダパルスを照射する送信部とレーダパルスに対応する複数の受信データを生成する受信部と目標物を探知する探知部において、受信部は前記複数の受信データをレンジセル毎に受信波のデータを生成し、前記探知部は、前記複数の受信データの全てを対象として、前記受信波のデータを積分し、全範囲積分部と前記複数の受信データを複数のグループに分割し、前記複数のグループそれぞれについて前記受信波のデータを積分し、前記複数のグループに関する積分結果を示す複数のグループ積分データを生成するグループ積分部と前記全範囲積分データと前記複数のグループ積分データとを比較することにより、目標物を示すレンジセルを検出し、検出結果データを生成する比較判定部とを備える。
(もっと読む)
距離,速度測定装置
【課題】測定周期毎に、送信波を反射した物標との距離(ひいては速度)を可能な限り精度良く求めることができる距離,速度測定装置を提供する。
【解決手段】受光チャンネルCHi(i=1〜4)のそれぞれについて一発測距回路321と積分測距回路322とを並行して動作させ、受光チャンネルCHiから得られる受信信号Riが上閾値より大となる一発測距領域では一発測距回路321による第1測距値D1を、受信信号Riが下閾値以下となる積分測距領域では積分測距回路322による第2測距値D2を、受信信号Riが下閾値より大且つ上閾値以下となる中間領域では、両測距値D1,D2の加重平均値を距離データDとして生成する。
(もっと読む)
1 - 20 / 535
[ Back to top ]