
Fターム[5J070AH20]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 統計的検知処理 (560) | 二次元のもの (25)
Fターム[5J070AH20]に分類される特許
1 - 20 / 25
物体認識装置
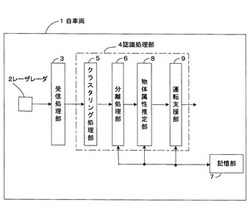
【課題】車載カメラのような他のセンサをさらに備えることなく低コストに、車載レーダが受信した反射点群のパターンから認識対象の物体を認識できるようにする。
【解決手段】レーザレーダ2が受信した反射点群のパターンの自車両1に対して反対方向に屈曲したL字状部分を分離処理部6により分離し、分離処理部6が分離したL字状部分が一部を構成する矩形に基づき、物体属性推定部8により認識対象の物体を認識する。
(もっと読む)
目標追尾装置及び目標追尾方法

【課題】目標の誤追尾を防止して、追尾精度を高めることができるようにする。
【解決手段】センサ1により特定されたプロットに対する類別処理を実施するプロット類別処理部2と、プロット類別処理部2から出力されたプロットの類別結果等を参照して、そのプロットの重心位置を追尾航跡の更新処理に使用するか否かを判定するプロット使用判定処理部3とを設け、追尾処理部4が、プロット使用判定処理部3によりプロットの重心位置を追尾航跡の更新処理に使用する旨の判定が行われた場合、そのプロットの重心位置を用いて追尾航跡を更新し、使用しない旨の判定が行われた場合、そのプロットの重心位置を用いずに追尾航跡を更新する。
(もっと読む)
代表位置検出装置、表示装置、レーダ装置、代表位置検出方法及び代表位置検出プログラム
【課題】物標の位置を精度よく検出することができる代表位置検出装置、表示装置、レーダ装置、代表位置検出方法及び代表位置検出プログラムを提供する。
【解決手段】画像データ生成部21が物標で反射したエコー信号に基づいて生成した画像データに対して、領域設定部22は、画像データの各画素の輝度に基づいて、物標を含む検出領域を画像データに設定する。画素選択部23は、設定した検出領域を構成する画素から、輝度が高い順を複数選択し、代表点検出部24は、画素選択部23が選択した画素の位置に基づいて、代表位置を検出する。
(もっと読む)
レーダ装置
【課題】昇順および降順周波数シーケンスを用いて送受信された信号同士の複素乗算結果から2次元フーリエ変換を用いて目標相対速度を計測可能なレーダ装置を得る。
【解決手段】目標相対速度情報取得手段11と、送信波形諸元を生成する送信波形制御器1と、任意周波数発振器2と、90度ハイブリッド器7と、送信機3と、送信機3からの信号を目標に照射して反射された信号を受信するアンテナ4と、分配器5と、位相検波器6a、6bと、低域通過フィルタ8a、8bと、A/D変換器9a、9bと、ビデオ信号記憶手段10と、目標相対速度Vdを用いて信号を補正する相対速度補正処理器12と、合成帯域処理器13と、目標距離Rを計測する目標検出処理器14とを備える。
(もっと読む)
目標物検出画像生成装置、目標物検出装置、クラッタ画像生成装置、目標物検出画像生成プログラム、目標物検出プログラム、クラッタ画像生成プログラム、目標物検出画像生成装置の目標物検出画像生成方法、目標物検出装置の目標物検出方法およびクラッタ画像生成装置のクラッタ画像生成方法
【課題】目標物だけを高い検出率で検出できるようにすることを目的とする。
【解決手段】レファレンスセル抽出部110は、レーダ画像191からターゲットセル101aを選択し、レーダ画像191からレファレンスセル101bを抽出する。画素平均値算出部120はレファレンスセル101bの画素平均値102を算出する。画素標準偏差算出部130はレファレンスセル101bの画素標準偏差103を算出する。標準偏差補正値算出部140は画素平均値102と画素標準偏差103との差を標準偏差補正値104として算出し、目標物検出画像生成部141は標準偏差補正値104をターゲットセル101aに対応する目標物検出画像194の画素領域に設定する。目標物検出部150は、目標物検出画像194から検出閾値より大きい画素領域を目標物領域として特定し、特定した目標物領域に対応する座標値を目標物座標値195として算出する。
(もっと読む)
船舶探知装置、船舶探知プログラムおよび船舶探知装置の船舶探知方法
【課題】レーダ観測により得られた画像データに基づいて船舶を高い精度で探知できるようにすることを目的とする。
【解決手段】CFAR方式演算部120は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶推定領域としてCFAR方式で特定する。ウエーキ方式演算部121は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶特定領域としてウエーキ方式で特定する。SC比マップ生成部130は、偏波組み合わせ毎に、船舶候補領域(船舶推定領域、船舶特定領域の一部)にSC比(海面散乱波の推定強度に対する船舶散乱波の推定強度)を設定してSC比マップ197を生成する。SC比合算マップ生成部140は、偏波組み合わせが異なる複数のSC比マップ197a〜Nを合算してSC比合算マップ198を生成する。船舶探知部150は、SC比合算マップ198に基づいて船舶領域を特定する。
(もっと読む)
埋設物探査装置
【課題】地中レーダ装置の受信信号に含まれる縞状ノイズ成分を容易に除去して画像の視認性を向上する。
【解決手段】2次元画像データにおける全ての反射時間軸方向の1次元画像データf(t)について、1次元ウェーブレット解析により時間−周波数領域へ変換して時間−周波数データを算出して縦縞ノイズの周波数成分を算出した後、ノイズ成分を抽出する第1フィルタリング処理を実行し、元の2次元画像データから抽出した縦縞ノイズ成分を除去する第2フィルタリング処理を実行して縦縞ノイズを除去し、更に、2次元画像データにおける全ての移動距離軸方向の1次元画像データf(t)について、同様のノイズ除去処理を実行して横縞ノイズを除去する。
(もっと読む)
レーダ画像処理装置
【課題】干渉信号の帯域幅によらず、合成開口レーダの受信信号から干渉信号を抑圧することによって、合成開口レーダ画像の劣化を防止可能なレーダ画像処理装置を得る。
【解決手段】合成開口レーダ画像に相当する第1の空間周波数領域の信号の非干渉帯域の信号に対して、2次元超解像法により超解像画像を生成し、超解像画像に相当する第2の空間周波数領域の信号を算出する2次元超解像処理手段4と、第2の空間周波数領域の信号を所定の関数で変換し、干渉信号を抑圧する干渉信号抑圧フィルタを生成する干渉信号抑圧フィルタ生成手段5と、干渉信号抑圧フィルタにより、合成開口レーダ画像から干渉信号が抑圧された画像に相当する第3の空間周波数領域の信号を算出する抑圧後信号算出手段と、第3の空間周波数領域の信号に対して、2次元IFFT処理により干渉信号が抑圧された合成開口レーダ画像を生成する2次元IFFT手段8とを備える。
(もっと読む)
画像処理装置
【課題】ウィンドウ内で複数の異なる性質を有する領域の有無を判定できる画像処理装置を得る。
【解決手段】局所領域を設定する局所領域設定部2と、局所領域のコヒーレンスを算出する局所領域コヒーレンス算出部3と、局所領域を複数のサブウィンドウに分割するサブウィンドウ設定部7と、コヒーレンスの理論平均値を算出する理論平均値算出部4と、コヒーレンスの理論標準偏差を算出する理論標準偏差算出部5と、閾値を算出する閾値算出処理部6と、各サブウィンドウのコヒーレンスを算出するサブウィンドウコヒーレンス算出部8と、各サブウィンドウのコヒーレンスの平均値を算出する平均処理部9と、閾値及び前記サブウィンドウのコヒーレンスの平均値の閾値処理に基づき、局所領域が一様な領域であるのか、局所領域内に異なる性質を有する領域の境界が含まれるのかを判定する境界領域判定処理部10とを設けた。
(もっと読む)
気象レーダシステムとその降水強度算出方法及びプログラム
【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を送信し、その反射波を受信する送受信装置11〜16と、その受信信号から偏波毎の受信電力を算出する信号処理装置17とを備える気象レーダシステムにおいて、データ変換装置19は、受信電力をもとに高分解能でレーダ反射因子(Z)を算出し、受信電力の偏波間位相差(φDP)をもとに低分解能で比偏波間位相差(KDP)を算出し、比偏波間位相差(KDP)をもとに低分解能領域毎の平均降水強度(Rave)を算出し、レーダ反射因子(Z)と降水強度(R)との関係式(Z=B×Rβ:B,βは定数)における第1定数(B)を、レーダ反射因子(Z)をもとに算出し、第1定数(B)、平均降水強度(Rave)及びレーダ反射因子(Z)をもとに第2定数(β)を推定し、上記関係式に基づいて、第1空間分解能の降水強度(R)を算出する。
(もっと読む)
気象レーダシステムとその降水強度算出方法及びプログラム
【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を送信し、その反射波を受信する送受信装置11〜16と、その受信信号から偏波毎の受信電力を算出する信号処理装置17とを備える気象レーダシステムにおいて、データ変換装置19は、偏波毎の受信電力をもとにレーダ反射因子(ZH,ZV)及び差分レーダ装置反射因子(ZDR)を算出し、受信電力の偏波間位相差(φDP)をもとに算出された比偏波間位相差(KDP)をもとに低分解能領域毎の平均降水強度(Rave)を算出し、レーダ反射因子(ZH)と降水強度(R)との関係式(ZH=B×Rβ:B,βは定数)における第1定数(B)を差分レーダ装置反射因子(ZDR)から算出し、さらに平均降水強度(Rave)及びレーダ反射因子(ZH)をもとに第2定数(β)を推定し、上記関係式に基づいて第1空間分解能の降水強度(R)を算出する。
(もっと読む)
自己位置推定装置、自己位置推定方法及びプログラム
【課題】自己位置の推定を高精度に行うこと。
【解決手段】自己位置推定装置10は、検出領域内の物体との距離情報を検出する距離センサ11を備え、距離センサ11により検出された物体との距離情報に基づいて、自己位置を推定する。また、自己位置推定装置10は、距離センサ11の検出領域を複数の小領域に分割し、距離センサ11により検出された物体の距離情報と、地図情報とに基づいて、小領域毎に自己位置を判定する小領域判定手段と、小領域判定手段により判定された小領域毎の自己位置の判定に基づいて、自己位置が正常であるか否かを最終的に判定する自己位置判定手段と、を備えている。
(もっと読む)
レーダ波浪解析装置
【課題】波浪情報の解析精度を向上する。
【解決手段】レーダ波浪解析装置10は、レーダ12の回転により得られる海面反射信号に対して2次元FFT処理を行うことにより2次元の波浪スペクトルを求める2次元演算手段16と、レーダ12の観測領域30での水深dに基づき作成され、観測領域30での浅海変形の影響を受けた海面反射信号に対応する波浪スペクトルを補正するための補正マップ20と、2次元演算手段16から出力された波浪スペクトルを補正マップ20で補正し、補正後の波浪スペクトルに基づいて観測領域30での波浪情報を取得する波浪情報取得手段25とを有する。
(もっと読む)
画像処理装置
【課題】地表面に生じた変化を高精度に捉えることができる画像処理装置を得る。
【解決手段】取得時間の異なる同一領域を観測した複数枚のレーダ画像を格納するデータ格納部1と、複数枚のレーダ画像から2枚のレーダ画像を選択して、2枚のレーダ画像の相関分布であるコヒーレンスマップを異なる窓の大きさでそれぞれについて複数枚算出するコヒーレンス算出処理部2と、得られた解像度の異なる各コヒーレンスマップにおける注目画素のコヒーレンスの値から最尤推定処理を実施するコヒーレンス最尤推定処理手段(尤度関数算出部20及び最尤推定処理部30)と、推定されたコヒーレンスの結果を格納する出力格納部2とを備える。
(もっと読む)
反射電磁波画像化システム
【課題】航空機など立体構造の対象物を画像化する場合、焦点が外れても画像がぼけないようにする。
【解決手段】対象物に中心部のエネルギー強度の強い平行ビームの電磁波を送信し、その反射波を平行ビームを受信するアンテナで受信し、その送信部及び受信部を一体にして上下、左右に移動させることにより反射電磁波の画像化を行う。
(もっと読む)
目標識別装置
【課題】多偏波観測により信号の次元を稼ぐことで目標識別性能の向上を図ることができる目標識別装置を得る。
【解決手段】複数の偏波チャネルで送受信を行い、多偏波レーダ画像を生成する多偏波レーダ画像取得手段1と、多偏波レーダ画像の各画素について全電力を算出して全電力画像を出力する全電力算出手段2と、全電力画像に対して閾値処理を適用して処理対象領域を抽出する第一閾値手段3と、抽出された領域に含まれる画素に対して近傍の領域から共分散行列の推定値を算出する共分散行列推定手段4と、共分散行列の固有値分解を行い、ポラリメトリックエントロピーとαパラメータを算出するエントロピー・αパラメータ算出手段5と、ポラリメトリックエントロピーとαパラメータ及び算出された全電力の値に対して識別判定を行う第二閾値手段6とを備えた。
(もっと読む)
レーダ装置
【課題】気象クラッタのドップラー周波数を高精度に測定し、気象クラッタを適切に抑圧することができるレーダ装置を提供する。
【解決手段】パルス信号の送受信によって目標物を検出する装置であって、低周波受信パルス信号から気象クラッタを検出し、気象クラッタのドップラー周波数および強度を出力する気象クラッタ検出部6と、ビーム走査毎に、ドップラー周波数に対する折り返し補正処理を実行し、第1補正後ドップラー周波数を出力する第1折り返し補正部8と、ビーム走査間で、第1補正後ドップラー周波数に対する折り返し補正処理を実行し、第2補正後ドップラー周波数を出力する第2折り返し補正部10と、第2補正後ドップラー周波数に対する平均化処理を実行して、ドップラー周波数平均値を出力する平均処理部12とを備えたものである。
(もっと読む)
目標追尾装置及び目標観測システム及び目標追尾方法及びプログラム
【課題】複数の目標が重なって一つの目標として観測されたのち重なった目標が離れて再び複数の目標として観測された場合でも、正しく目標を同定できる相関処理を実現する。
【解決手段】重複判定装置115は、複数の目標が重なって一つの目標として観測されたか否かを判定する。目標間距離算出装置121は、複数の目標が重なる直前に観測された位置の間の距離(重複前距離)を算出する。目標間距離ゲート設定装置131は、重複前距離に基づいて分離判定範囲を設定する。分離判定装置132は、分離判定範囲内に新たな目標が観測された場合に、重なった目標が離れて再び複数の目標として観測されたと判定する。分離妄評移動距離算出装置133は、分離目標移動距離を算出する。分離目標判定装置135は、分離目標移動距離に基づいて重なった目標が離れて観測された複数の目標を同定する。追尾装置150は、分離目標判定装置135が同定した目標を追尾する。
(もっと読む)
物体検出装置
【課題】検出信号のピーク値を的確に検出して適切な物体検出が行える物体検出装置を提供すること。
【解決手段】電波を送信し物体で反射した受信波を送信波とミキシングして検出信号を出力し、その検出信号において物体に対応したピーク値を検出する際に、ピーク値の検出予測位置に所定範囲の探索領域を設定し(S10)、その探索領域においてピーク値を検出し(S12)、その探索領域にピーク値を検出できない場合に検出信号の信号値の増加する側に探索領域をシフトさせてピーク値の検出を行う(S12〜S16)。これにより、探索領域を大きくすることなく広い範囲でピーク検出が可能となり、確実なピーク検出が行え、物体の検出精度の向上が図れる。
(もっと読む)
材料を検査するためのマイクロ波装置
本発明は、材料(150)に放射するための搬送周波数Fpの電磁信号を送信するための手段(110)と、電磁信号を受信するための手段(130)とを少なくとも備える、材料(150)を検査するための装置(100)であって、送信された電磁信号を空間的に標本化するために、送信手段(110)と材料(150)との間の信号経路に設けられている、電磁信号を周波数Fm1で変調するための第1変調手段と、材料(150)を通過した電磁信号を空間的に標本化するために、材料(150)と電磁信号受信手段(130)との間の信号経路に設けられている、電磁信号を周波数Fm2で変調するための第2変調手段(140)とをさらに備えることを特徴とする装置に関する。 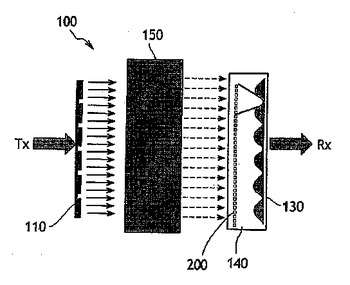 (もっと読む)
(もっと読む)
1 - 20 / 25
[ Back to top ]