
Fターム[5J070AH23]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 周波数の測定 (249)
Fターム[5J070AH23]の下位に属するFターム
Fターム[5J070AH23]に分類される特許
1 - 20 / 49
擬似信号発生回路
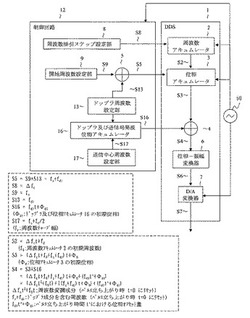
【課題】 PLDの制御回路およびDDSを用いた小規模なハードウェア構成で実現できる擬似信号発生回路において、擬似目標からのレーダ連続パルス受信信号を模擬する際に、目標が移動することで観測される周期的なパルス間位相推移に不連続点が発生する。
【解決手段】 制御回路内で擬似移動目標のパルス間位相推移量を積算するアキュムレータについて、ドップラ周波数成分のみで積算するのではなく、ドップラ周波数成分と送信局部発振波の中心周波数成分を合わせて積算することで、パルス立ち上がり時間が切替わる際でも位相誤差が発生しないようにした。
(もっと読む)
信号測定装置

【課題】突発的に入力される被測定信号の検出確度を高めて、この被測定信号が含まれる周波数帯域に対する高精度な検査をより確実に行う。
【解決手段】測定周波数帯域の被測定信号S1を分配する分配部3と、分配部3からの被測定信号S1aを入力して、測定周波数帯域を連続する3個の周波数帯域に分割した各分割帯域に含まれる各分割帯域内信号S2a〜S2cを並列的に検出する信号検出部4と、指定された分割帯域の周波数帯域幅と同じ周波数帯域幅で第1局発信号S3を掃引し、分配部3からの被測定信号S1bと第1局発信号S3とをミキシングして生成した信号S4を検波して、指定された分割帯域内の分割帯域内信号についての検波出力Vdを生成する受信部5と、信号検出部4で分割帯域内信号S2が検出された分割帯域のうちの1つを指定された分割帯域として受信部5に対して検波出力Vdを生成させる処理部7とを備えている。
(もっと読む)
センサ組立体およびセンサに対する機械構成部品の近接度を測定する方法
【課題】機械構成部品の近接度を測定する方法の提供。
【解決手段】マイクロ波センサ組立体110は、少なくとも1つのマイクロ波信号を生成するための信号ジェネレータ218と、前記信号ジェネレータに結合された放射源206と、を含む。放射源は、少なくとも1つのマイクロ波信号から電磁場を生成するように構成され、負荷信号が生成されるように物体が電磁場内に配置されたとき、放射源は離調する。マイクロ波センサ組立体は、放射源と信号ジェネレータとに結合された検出器214も含む。検出器は、放射源までの物体の近接度を測定するうえで使用するために負荷信号の一次周波数における負荷信号の振幅、位相、および電力の少なくとも1つを算出するように構成されている。
(もっと読む)
周波数検出装置及び周波数検出方法
【課題】無線信号の搬送周波数の検出において瞬時的な雑音や不要波成分による誤検出を低減する。
【解決手段】周波数検出装置1は、パルス信号を送信する送信部6と、信号を受信する受信部9と、送信部6により送信され物体70で反射して受信部9により受信されたパルス信号を追跡することによりパルス信号の反射時間を検出する検出部11と、反射時間が所定範囲内であるか否かを判定し、反射時間が所定範囲内でない場合にパルス信号の搬送周波数を検出対象の搬送周波数と判定する判定部12を備える。
(もっと読む)
電波発射源検出センサ、自動料金収受システム及び路側器
【課題】所定のレーンに設置された路側器と、その隣接レーンに存在する車載器との間で確立された誤通信を中断し、車載器に対する誤課金を防止することが可能な電波発射源検出センサと、このセンサを用いた自動料金収受システム及び路側器とを提供する。
【解決手段】所定のレーンに設置され、移動体に所持された応答器からの応答信号を第1の受信ビームにより受信し、応答器と通信を行う路側器に接続される電波発射源検出センサは、アンテナ部、検波部、方向特定部及び誤通信判定部を具備する。アンテナ部は、第2の受信ビームにより応答信号を受信する。検波部は、応答信号から、所定の検波周波数により必要信号を検波する。方向特定部は、検波結果に基づいて、電波強度を測定し、応答信号の到来方向を特定する。誤通信判定部は、電波強度及び到来方向等に基づいて、路側器と応答器との通信は誤りであるか否かを判定し、誤りであれば、誤通信通知を路側器へ出力する。
(もっと読む)
ドップラーセンサ及び該ドップラーセンサを用いた照明装置
【課題】干渉を発生させにくいドップラーセンサ及び該ドップラーセンサを用いた照明装置を提供する。
【解決手段】所定の検出範囲に電波を送信するとともに、検出範囲からの電波を受信し、送信に用いた送信信号と受信により得られた受信信号とからドップラー信号を生成して出力する送受信部3と、ドップラー信号を用いて検出範囲内における人体の有無を判定する人体判定部4と、他のドップラーセンサのような外部の発生源からの周期的な電波による上記ドップラー信号への影響の有無を判定する影響判定部5とを備える。送受信部3は、通常は電波の送信を間欠的とし、影響判定部5によって影響があると判定されると電波の送信を連続的とする。送受信部3が電波の送信を連続的としている期間には、より低い周波数を用いるような他のドップラーセンサとの間での干渉の発生が避けられる。
(もっと読む)
レーダ装置
【課題】JEMを伴う場合の目標相対速度を正しく算出し性能向上を図ったレーダ装置。
【解決手段】送受信手段で受信された時間領域の受信信号を周波数領域に変換する周波数領域変換手段と、周波数領域変換手段で変換された周波数領域の受信信号における信号強度に基づく演算処理を行い目標候補を検出するとともに目標候補の相対速度を算出する目標候補検出手段と、目標候補検出手段で検出された目標候補の相対速度に基づきJEM間隔を算出するJEM間隔算出手段と、JEM間隔算出手段で算出された異なる時刻のJEM間隔に基づき目標の運動を判定する目標運動判定手段と、目標候補検出手段で算出された異なる時刻の目標候補の相対速度に基づき目標候補の加速度を算出する目標候補加速度算出手段と、目標運動判定手段の目標運動判定結果と目標候補加速度算出手段の目標候補の加速度に基づき目標および目標の目標相対速度を判定する目標判定手段とを含む。
(もっと読む)
サブミリ波放射計
【課題】超微細粒子などからの放射、散乱信号を受信し、大気等の状況を判断する。
【解決手段】サブミリ波以上の電磁波を受信し、受信波はハーフミラー2で透過波と90°下に進む反射波に分け、透過波はファラデー回転板5で90°偏波する。また、ハーフミラー2に上側から、校正用の参照波をハーフミラーに入射する。その後2つに分かれたサブミリ波は、コーナーキューブハーモニックミキサ6により、中間周波数に変換する。その交叉偏波、強度を測定し、超微細粒子などからの放射、散乱状況を判断する。
(もっと読む)
周波数計測装置、周波数計測方法、速度計測装置及び速度計測方法
【課題】簡易な装置で短時間に周波数を計測する。
【解決手段】計測対象としての移動体によって反射されたマイクロ波を、電気信号に変換する。次に、この電気信号が増幅されることにより生成された電気信号を、第1出力回路13を用いて、第1出力回路13を構成するハイパスフィルタの減衰特性に応じた電圧レベルの直流信号SD13に変換する。同時に、第2出力回路14を用いて、第2出力回路14を構成するローパスフィルタの減衰特性に応じた電圧レベルの直流信号SD14に変換する。そして、直流信号SD13の値と直流信号SD14の値とを用いて、電気信号の周波数を算出する。
(もっと読む)
レーダ装置
【課題】異る周波数変調率で変調された受信ビート信号のビート周波数を組合せて目標距離を算出するレーダで、異る目標の振幅値及び測角値が閾値以内では目標の正しい組合せができず、又複数目標のビート周波数差がビート周波数分解能以下では信号を分離できない。
【解決手段】アンビギュイティのない距離分解能と、ビート周波数分解能からのパラメータで選択した周波数変調率で複数のPRIに亘りチャープ状に周波数変調されたキャリア信号を放射、目標での反射信号を受信し、キャリア信号で変換した受信ビート信号にPRI間FFTを行い作成したPRI内距離−ビート周波数マップから、検出した目標候補同士を組合せ、目標候補のビート周波数の組合せからアンビギュイティのない距離及び速度を算出、アンビギュイティのない距離によりPRI内距離の距離アンビギュィティを解消し目標との距離を算出する。
(もっと読む)
電波探知装置及びそれに用いるレーダ数判定方法
【課題】 同一方位の目標が単一のレーダから発射された電波であるか、複数のレーダから発射されたされた電波であるかを判定可能な電波探知装置を提供する。
【解決手段】 電波探知装置は、PRIフィルタ(14)を用いてレーダ波の分離を行い、周波数、方位、受信電力、パルス幅、PRIの情報を持つ目標データを作成して目標データ管理テーブル(18)に記録する。電波探知装置は、PRIフィルタ(14)後のTOAのうちの最も早い時刻のTOAと最も遅い時刻のTOAとを抽出して目標データに付加する付加手段(TOA情報付加回路16)を有し、付加手段(TOA情報付加回路16)にて最も早い時刻のTOAと最も遅い時刻のTOAとが付加された目標データを目標データ管理テーブル(18)に記録している。
(もっと読む)
パッシブレーダ装置
【課題】全体の処理時間を短縮させることができ、パッシブレーダを用いた逆合成開口レーダによる高分解能レーダ画像を実用的な方式で取得できるパッシブレーダ装置を提供する。
【解決手段】直接波受信処理部11及び散乱波受信処理部12は、それぞれ直接波及び散乱波について、間欠的に受信処理を行う。この場合、直接波受信処理部11及び散乱波受信処理部12は、T0[sec]の受信をΔt[sec]の間隔でN回繰り返す。レンジ圧縮部13は、パルス毎に相互相関処理を実行することによってレンジ圧縮を行う。レンジ圧縮部13は、レンジ圧縮によって得た相互相関関数であるレンジプロフィールを、後段のクラッタ抑圧部14に送る。クラッタ抑圧部14は、レンジヒストリにおけるパルス方向平均を、各レンジプロフィールから差し引く処理を実行することによって、背景の静止物からの反射信号を抑圧する。
(もっと読む)
電子情報受信機の信号識別方法
【課題】多重経路信号と意図しないMOPによる未識別または誤識別を防止して信号パラメータを抽出することができる電子情報受信機の信号識別方法を提供する。
【解決手段】本発明に係る電子情報受信機の信号識別方法は、受信した信号から直接経路信号と多重経路信号によるMOP(modulation on pulse)の開始時点および終了時点を検出するステップ;前記信号の開始時点から前記MOPの開始時点までの区間における前記信号のインフェーズ成分とクアドラチャ成分を利用して、信号強さ、周波数、位相のうちの少なくとも1つを抽出するステップ;および前記信号の開始時点から前記MOPの終了時点までの区間を前記信号のパルス幅として抽出するステップを含むことを特徴とする。
(もっと読む)
風計測装置
【課題】所望の風成分の風速を、比較的小さな演算量で、かつ高精度に推定することができる風計測装置を得る。
【解決手段】目標物で反射されて受信される受信信号のドップラ周波数から得られるドップラ速度に基づいて、遠隔点の風速を計測する風計測装置10であって、受信信号を周波数変換してドップラスペクトルを算出するドップラ速度算出部1と、ドップラスペクトルおよび推定条件に基づいて、スペクトルパラメータを推定する第1スペクトルパラメータ推定部3と、受信信号が得られた付近の領域における背景情報、およびスペクトルパラメータを推定する際の制約条件を、推定条件として第1スペクトルパラメータ推定部3に入力する推定条件入力部2と、スペクトルパラメータから所望の風成分を抽出し、この所望の風成分のドップラ速度を算出するスペクトルパラメータ判定部4とを備える。
(もっと読む)
渋滞検知装置及びプログラム
【課題】 片側複数車線の道路における渋滞の発生有無を検知することが可能な1つのドップラー方式の検出センサを用いた渋滞検知装置の提供。
【解決手段】 片側複数車線を走行中の1乃至複数の車両に対し放射した送信波と、車両からの反射波との差分波を周波数分析した結果に基づいて、車両の速度を算出するための周波数スペクトルを、振幅値が大きい順に抽出した複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを基準に特定する。すなわち、特定した振幅値が小さい周波数スペクトルの周波数を基準として他の周波数スペクトルの周波数との比較を行い、この比較により得られた周波数が小さい方の周波数スペクトルから速度を算出する。算出した速度を所定値と比較して渋滞発生の有無を判定する。これにより、片側複数車線の道路における渋滞の発生有無を検知することが、1つのドップラー方式の検出センサを用いるだけでできるようになる。
(もっと読む)
目標検出装置及び目標検出方法
【課題】低S/N環境下においても目標を精度良く検出できるようにする。
【解決手段】目標検出器4は、目標からの反射波を観測した信号から目標の距離と周波数とを2次元で表す観測信号を求める解析処理器11と、複数の粒子フィルタを並列に用いて、観測信号と基準時刻より前に抽出された予測信号とをもとに、基準時刻における目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出する抽出処理器12と、抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、基準時刻における目標の距離と周波数とを示す目標信号として検出する検出処理器13と、検出された粒子の軌跡をもとに目標を追跡する追跡処理器14とを具備する。
(もっと読む)
吐水装置または吐水装置を備えた水栓装置
【課題】
被検知体の動きに応じた最適なタイミングで吐水を開始することができる吐水装置を提供する。
【解決手段】
吐水部と、
放射した電波の反射波によって被検知体の移動に関する情報を取得するセンサ部と、
前記センサ部からの検知信号に基づいて前記吐水部からの吐水を制御する制御部と、
を備え、
前記制御部は、前記被検知体が前記吐水部に到達する前に前記吐水を開始させるために、前記被検知体の前記吐水部への接近動作における速度が所定時間略一定であった後、速度変化を検知して、前記吐水を開始することを特徴とする吐水装置。
(もっと読む)
水栓装置
【課題】人の手が吐水口の下に達する直前など、被検知体の動きに応じたタイミングで吐水を開始する水栓装置を提供する。
【解決手段】吐水部と、受水部と、吐水部からの吐止水を切り替えるバルブ250と、電波を放射し、被検知体により反射した反射信号を受信するアンテナ112と、アンテナ112で受信した反射信号によって被検知体の有無を判断する検知部100と、検知部100から出力される検知信号に基づいて被検知体の速度を識別し、その結果に基づき前記バルブ250の開閉を制御する制御部200と、を備えた水栓装置であって、制御部200は被検知体の速度が第一の閾値より高い状態から前記第一の閾値以下の状態に変化した後、所定時間の間、第一の閾値よりも高い速度状態に変化しないことを識別すると、バルブ250を開動作させる。
(もっと読む)
センサ装置、入力装置及び制御方法
【課題】非接触で検出対象の多次元的な動きを検出することが可能なセンサ装置、これを備えた入力装置及び制御方法を提供する。
【解決手段】本発明の一形態に係るセンサ装置10は、アンテナパネル11と、発振回路12と、測定回路13と、演算回路14と、制御コマンド生成回路15とを有する。アンテナパネル11は、X方向及びY方向に配列された複数のアンテナ部111X、111Yを有する。発振回路12は、上記複数のアンテナ部と検出対象との間の距離に応じて異なる発振周波数を有する検出信号を出力する。測定回路13は、上記検出信号の周波数変化を測定する。演算回路14は、上記測定回路13によって測定された検出信号の周波数変化に基づいて、上記複数のアンテナ部の各々と上記検出対象との間の距離と、X、Y方向に沿った検出対象の動きに関する量とを算出する。
(もっと読む)
航空機の識別方法、並びにそれを用いた航空機騒音の測定方法及び信号判定方法
【課題】民間機と軍用機を含めた航空機の識別方法を提供する。
【解決手段】航空機が放射する電波高度計電波、対空・対地走査電波、気象レーダ信号、敵味方識別信号、及び/又はトランスポンダ応答信号の電波の周波数掃引又はパルスの変調方式及び/又は偏波面の違いを解析することによって、上空を飛行する各航空機の自動識別を行う。そして、民間機と軍用機の飛行空域が重なる場所での航空機騒音の自動測定を行う。また、航空機の自動識別方法を用いて演算処理した航空機の自動識別データを騒音測定の測定開始トリガーや統計処理を用いた信号判定に用いる。
(もっと読む)
1 - 20 / 49
[ Back to top ]