
Fターム[5J070AH33]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 包絡線検波を行なうもの(振幅による測定) (448)
Fターム[5J070AH33]に分類される特許
1 - 20 / 448
位置検出装置
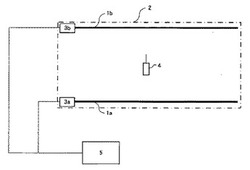
【課題】移動体の位置を精度良く検出する位置検出装置を提供する。
【解決手段】位置検出エリア2に敷設された漏洩同軸ケーブル1a,1bと、漏洩同軸ケーブル1a、1bに接続され、電波を送受信し、この送信する電波には固定局識別信号を含み、電波の送信出力値を変更できる少なくとも2つのアクセスポイント3a、3bと、位置検出エリア2内を移動し、アクセスポイント3a、3bからの送信電波を受信し、受信した固定局識別信号と移動局識別信号を含む電波を送信する少なくとも1つの携帯端末4と、アクセスポイント3a、3bに接続され、電波送信出力値を設定し、固定局識別信号と移動局識別信号と電波送信出力値とから携帯端末4の位置を特定する制御処理部5を有する位置検出装置。
(もっと読む)
無線タグ方向探知システム

【課題】ノイズ検出用のアンテナを追加することなく、ノイズの少ない通信チャネルを探すことができる無線タグ方向探知システムを提供する。
【解決手段】無線タグ200は、送信するデータを、トリガデータと、方向探知用データに分ける。無線タグリーダ100は、通信用アンテナ140で受信待ちを行い、トリガデータを受信したらチャネル指定データを送信する。このチャネル指定データを受信した場合に、無線タグ200は方向探知用データを送信する。また、無線タグリーダ100は通信用アンテナ140で受信待ちをしている間、方向探知用アンテナ150を用いて、方向探知チャネルの候補チャネルでノイズ強度を測定して方向探知チャネルを決定する方向探知チャネル決定処理を行なう。そして、チャネル指定データで、この方向探知チャネル決定処理で決定した方向探知チャネルを指定し、方向探知用データの送受信は、指定した方向探知チャネルで行う。
(もっと読む)
システム及びプログラム
【課題】 警報対象の存在を報知した場合に、ユーザがそれを見落とすことなく知ることができるシステムを提供すること
【解決手段】 警報報知する手段として、表示部5に加えてカラーLED22を光源とする発光部を設ける。制御部18は、条件を満たした場合に、LEDを光源とする発光部の発光状態を制御して警報報知をする。このとき、発光状態の制御は、警報条件を満たした警報対象に対応した発光色で発光する。
(もっと読む)
物体距離検出装置
【課題】物体に対する距離の検出精度を向上させる。
【解決手段】物体距離検出装置10は、レーダ装置11の発信部11aにより電磁波が発信された時刻から受信部11bにより反射波が受信された時刻までの時間差を検出し、時間差に基づき車両から物体までの距離を算出する距離検出部25と、時間差と反射波の受信強度との対応関係を示す2次元直交座標面上での受信強度分布の波形Fにおける受信強度の増加側および減少側での傾きに応じて、受信強度の極大値(推定ピーク電圧Vpeak)を推定する極大値推定部24と、受信強度分布の波形Fにおける受信強度が電圧閾値Vth以上である時間幅(推定パルス幅W)と、極大値(推定ピーク電圧Vpeak)とに基づいて、距離検出部25により算出された距離を補正する距離補正部26とを備える。
(もっと読む)
遠隔ロケーションにおけるRFIDベースの誘導
【課題】区域内でユーザを位置特定するため、および誘導するための誘導位置特定システム等を提供する。
【解決手段】クエリ信号40を送信し、応答信号42を受信するように構成されたRFID(無線周波数識別)読取りデバイス14と、区域内に配置されたRFIDタグ8を含む。RFIDタグは、その区域内のRFIDタグのロケーションに関連付けられた固有の情報を格納する。RFIDタグのそれぞれは、RFID読取りデバイスからクエリ信号を受信し、その固有の情報を伝送する応答信号をRFID読取りデバイスに送信するように構成される。RFID読取りデバイスは、応答信号を利用して、その区域内のそのRFID読取りデバイスの現在のロケーションを特定するように構成される。
(もっと読む)
レーダ信号処理装置
【課題】 目標信号のパルス幅に対してサンプリング周波数を高くとった場合、デフルータ処理を行なう際に目標が複数のレンジビンにまたがるため、目標信号にもかかわらずブランキングレンジ処理を行なってしまい、目標のパルス幅を狭め、目標検出精度を低下させてしまうことがある。
【解決手段】 ブランキングレンジ判定において、ジャミング候補と判定されたレンジビンの前後Nレンジビン間に目標信号が存在するかを確認し、目標信号が存在した場合、そのレンジビンは目標として、ブランキングレンジ処理を行なわず、目標信号が存在しない場合、そのレンジビンはジャミングと判定し、ブランキングレンジ処理を行なう。
(もっと読む)
信号測定装置
【課題】突発的に入力される被測定信号の検出確度を高めて、この被測定信号が含まれる周波数帯域に対する高精度な検査をより確実に行う。
【解決手段】測定周波数帯域の被測定信号S1を分配する分配部3と、分配部3からの被測定信号S1aを入力して、測定周波数帯域を連続する3個の周波数帯域に分割した各分割帯域に含まれる各分割帯域内信号S2a〜S2cを並列的に検出する信号検出部4と、指定された分割帯域の周波数帯域幅と同じ周波数帯域幅で第1局発信号S3を掃引し、分配部3からの被測定信号S1bと第1局発信号S3とをミキシングして生成した信号S4を検波して、指定された分割帯域内の分割帯域内信号についての検波出力Vdを生成する受信部5と、信号検出部4で分割帯域内信号S2が検出された分割帯域のうちの1つを指定された分割帯域として受信部5に対して検波出力Vdを生成させる処理部7とを備えている。
(もっと読む)
レーダ装置及び目標探知方法
【課題】被探知目標を適正に探知する開口合成を可能とする。
【解決手段】目標を探知するレーダ装置において、空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナと、各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得する包絡線検波部と、各基準パスの受信信号の包絡線間の積分距離の最小値を与える遅延量から基準パス間の位相補正量を決定する決定部と、決定された位相補正量を用いて、2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正部とを含む。
(もっと読む)
レーダ装置及びレーダ装置の信号処理方法
【課題】簡単な装置構成で、ウェザークラッタの影響を受ける領域における目標の検出率を向上させ、安定した目標追尾が行えるレーダ装置及びその信号処理方法を提供する。
【解決手段】信号処理器2は、検出処理手段21、追尾処理手段22、及びウェザー判定処理手段23から構成されている。ウェザー判定処理手段23は、ウェザークラッタの影響を受ける領域(ウェザークラッタ情報)を算出し、ウェザークラッタ情報を取得した検出処理手段21は、ウェザークラッタの影響を受ける領域に対して、通常の検出判定用スレッショルドよりも低く設定されたウェザークラッタ領域検出判定用スレッショルドを適用するようにした。これにより、簡単な装置構成で、ウェザークラッタの影響を受ける領域における目標の検出率が向上し、安定した目標追尾を行うことが可能なレーダ装置が得られる。
(もっと読む)
制御装置、レーダ検知システム、レーダ検知方法
【課題】レーダから出力された検知結果によって異常を監視し、レーダの性能の低下を検知する。
【解決手段】取得部1aは、レーダ2から出力された信号に基づき、車道を走行した複数台の走行車両のそれぞれについて、検知開始位置および検知終了位置の座標を取得する。算出部1bは、検知開始位置の座標の平均値および検知終了位置の座標の平均値を算出し、算出結果を有する検知状況情報を検知状況情報記憶部1eに記憶させる。比較部1cは、検知状況情報が示す検知開始位置の座標の平均値および検知終了位置の座標の平均値とそれぞれの所定の基準値とを比較する。異常判定部1dは、比較部1cによる比較結果に基づいて、レーダ2の異常の発生の有無を判定し、異常が発生したと判定した場合には異常の発生を示す情報を出力する。
(もっと読む)
速度計測装置
【課題】路面に対する移動体の速度を正確に計測する。
【解決手段】速度計測装置は、路面形状データを取得する路面形状センサ11と、路面形状データを格納するメモリ12と、メモリ12に格納された路面形状データに基づいて、車両10の速度を計算する演算装置13とを備える。路面形状センサ11は、路面に電波を放射し、路面形状センサ11からの距離が異なる路面上の複数の構造物によって反射された各反射波の信号レベルと、路面形状センサ11から各構造物までの伝搬距離とを測定することで、路面形状データを取得する。演算装置13は、各路面形状データの伝搬距離を、路面に射影した水平距離に変換し、類似する路面形状データが取得されるときの路面形状データとの水平距離の差を決定し、水平距離の差を測定時間の差で除算して移動体の速度を計算する。
(もっと読む)
センシングシステム、センシング方法及びプログラム
【課題】電磁波によるセンシングを行うよりも対象物のセンシングにおける電力損失を抑えることができるセンシングシステムを提供する。
【解決手段】送信アンテナ16は、電源20に接続されており、入力される電力の一部を受信アンテナ18に伝達する。情報処理装置14は、電源20から出力される電力と、送信アンテナ16から電源20に還る電力と、に基づいて、送信アンテナ16と受信アンテナ18との間の距離に応じた値を特定する。情報処理装置14は、距離に応じた値に基づく処理を実行する。
(もっと読む)
無線端末方向探知装置
【課題】同周波数帯に干渉電力が存在する場合にも、精度の良い方向探知が可能な無線端末方向探知装置を提供する。
【解決手段】方位角θを変化させつつ(ステップS2、S9)、電力値を検出し(ステップS3)、検出した電力値に基づいて電力値パターンを生成し(ステップS11)、生成した電力値パターンを用いてタグ方向を判定する(ステップS12)。ただし、変調情報が正常に復調できるか否かを判断し(ステップS5)、正常に復調できない場合にはその変調情報に対応する電力値は用いず、補間により電力値パターンを生成する(ステップS11)。これにより、受信電力が大きくても、異なったシステムの無線端末からの電波の干渉が大きい電波を除去して無線端末の方向を探知することができる。よって、誤った方向を探知してしまうことが抑制できる。
(もっと読む)
気象レーダ装置及び気象観測方法
【課題】三次元気象データを一定の高い観測精度で取得すること。
【解決手段】本実施形態に係る気象レーダ装置は、複数のアンテナ素子を鉛直方向に配列したフェーズドアレイ方式のアンテナ11と、アンテナ11により各方位方向について複数の仰角方向に所定のヒット数のパルスを送信し、その反射波を受信する送受信部13と、上記仰角方向の変化に対して送受信部13で受信された信号のS/N(signal-to-noise ratio)と観測精度との関係に基づいて上記ヒット数を変更させる送信タイミング信号を生成する信号処理部14と、この送信タイミング信号に従って送信信号を作成する送信制御部15とを具備する。
(もっと読む)
電波受信装置及び信号分析方法
【課題】 電波を分析する際の処理を短縮させることが可能であり、かつ、ハードウェア規模の増大を抑えることが可能な電波受信装置及びこの装置で用いられる信号分析方法を提供する。
【解決手段】 電波受信装置は、アンテナ、RF受信器、IF受信器、検出処理器及び信号分析処理器を具備する。アンテナは、電波を受信する。RF受信器は、前記アンテナで受信した受信信号に対して振幅検波を行い、第1の検波結果を生成すると共に、前記受信信号をIF帯のIF信号へ変換する。IF受信器は、前記RF受信器からのIF信号に対して振幅検波及び位相検波を行い、第2の検波結果を生成する。検出処理器は、前記第1の検波結果をビデオ積分し、前記第2の検波結果に対してFFT(Fast Fourier Transform)を行う。信号分析処理器は、前記ビデオ積分の結果と前記FFTの結果とを参照し、前記電波の分析を行う。
(もっと読む)
データ処理装置
【課題】リセット状態を解除されたCPUが周期データの先頭位置を検出することなく、周期データの適切な位置からデータを処理できるデータ処理装置を提供する。
【解決手段】データ受信回路は、CPUがリセット状態の場合(S412:Yes)、データ計測装置から受信したデータをCPUに出力せず、リセット発生フラグをセットする(S414)。CPUはリセット状態ではないが(S412:No)、リセット発生フラグがセットされている場合(S416:Yes)、CPUのリセット状態は解除されているが周期の最後までデータを受信していないことを表しているので、データ受信回路はCPUにデータを出力しない。受信データ数が1周期分のデータ数以上の場合(S420:Yes)、周期の最後のデータを受信したことを表しているので、CPUがリセット状態ではない場合(S422:No)、データ受信回路はS402でリセット発生フラグをクリアする。
(もっと読む)
エコー信号処理装置、レーダ装置、エコー信号処理プログラム及びエコー信号処理方法
【課題】簡単な構成で、物標追尾等の処理で用いることができる有用な情報を取得することが可能な信号処理装置を提供する。
【解決手段】信号処理装置3は、スキャン相関処理部33と、物標状態判別部38と、を備える。スキャン相関処理部33は、第1の時刻に受信された第1エコー信号のレベルと、前記第1の時刻よりも前の第2の時刻に受信された第2エコー信号のレベルと、に基づいて、第1の時刻におけるスキャン相関信号レベルを出力する。物標状態判別部38は、第1エコー信号のレベルと、第1の時刻におけるスキャン相関信号レベルと、に基づいて、第1エコー信号に対応した物標の状態を判別する。
(もっと読む)
車両用レーダ装置
【課題】受信波形と基準信号との差分に基づいて測距を行う際に、車両走行状態で周囲環境が変化しても安定的に基準信号を取得する。
【解決手段】基準信号取得部24でターゲットが存在しない状態の受信検波波形を「基準信号」として取得し、処理波形算出部25で受信検波波形から基準信号を差分して実際のターゲットからの受信波形を取り出し、距離測定演算部26で距離演算を行う。基準信号の取得は、基準信号となる受信波がターゲットの反応を含んだものより信号レベルが低くなることに着目して行い、複数回のフレームデータ(受信検波波形)から、サンプリング時間毎に最低値又は最低値に順ずる値を抽出し、抽出した値をつなげて作成したフレームデータを基準信号として取得することで、閾値を用いることなく走行状態で基準信号を安定的に取得して更新する。
(もっと読む)
画像レーダ装置
【課題】画像化する領域における補償誤差を小さくしつつ、分割する領域のサイズを従来のものよりも大きくして画像再生処理の効率を向上させるとともに、分割する領域の数を減らして結合後の画像における不連続部分を減らすことができる画像レーダ装置を得る。
【解決手段】軌道データ格納部12に格納されたプラットフォームの実軌道の軌道データに基づいて、参照軌道を算出する参照軌道算出部21と、地表上に、位相補償に用いられる複数の基準点を設定する複数基準点設定部22と、実軌道および参照軌道と基準点との距離差に基づいて、位相補償量を決定する補償量決定部23と、位相補償量に基づいて、観測データ格納部13に格納された観測データの位相を補償する補償処理部31と、位相補償後の観測データに対して画像再生処理を実行し、レーダ画像を再生する再生処理部32とを備える。
(もっと読む)
走行車両台数計測装置及びプログラム
【課題】 1車線の道路上を走行した車両台数を正しく計測することが可能なドップラー方式の検出センサを用いた走行車両台数計測装置の提供。
【解決手段】 1車線上における任意の計測範囲内を走行中の車両に対し放射した送信波と、車両からの反射波との差分波を周波数分析することによって抽出される車両の速度と振幅値とを取得してそれらの時間変位を記録する。記録した車両速度と振幅値とに基づいて、前記計測範囲に車両が進入してから通過し終わるまでにかかる経過時間を確定し、当該確定した経過時間毎に車両台数をカウントする。すなわち、単に車両速度のみを用いて通過車両の台数をカウントするのではなく、車両速度に振幅値を組み合わせて用いて通過車両の台数をカウントする。これにより、計測範囲内における車両の移動態様を的確に把握して通過車両の台数をカウントすることが、ドップラー方式の検出センサを用いるだけでできるようになる。
(もっと読む)
1 - 20 / 448
[ Back to top ]