
Fターム[5J070AH35]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フーリエ変換を行なうもの(DFT、FFT、IFFT) (880)
Fターム[5J070AH35]に分類される特許
341 - 360 / 880
センサ装置、入力装置及び制御方法
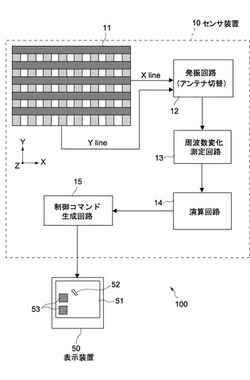
【課題】非接触で検出対象の多次元的な動きを検出することが可能なセンサ装置、これを備えた入力装置及び制御方法を提供する。
【解決手段】本発明の一形態に係るセンサ装置10は、アンテナパネル11と、発振回路12と、測定回路13と、演算回路14と、制御コマンド生成回路15とを有する。アンテナパネル11は、X方向及びY方向に配列された複数のアンテナ部111X、111Yを有する。発振回路12は、上記複数のアンテナ部と検出対象との間の距離に応じて異なる発振周波数を有する検出信号を出力する。測定回路13は、上記検出信号の周波数変化を測定する。演算回路14は、上記測定回路13によって測定された検出信号の周波数変化に基づいて、上記複数のアンテナ部の各々と上記検出対象との間の距離と、X、Y方向に沿った検出対象の動きに関する量とを算出する。
(もっと読む)
電波監視装置

【課題】 受信電波の周波数と監視対象として予め登録された周波数との間に誤差がある場合や、受信電波に帯域の広がりがある場合でも、電波の到来方位を正確に測定することができる電波監視装置を提供する。
【解決手段】 受信電波のスペクトラムデータを出力する監視受信機5を備え、方探信号処理器6において、前記スペクトラムデータから得られる電界強度と周波数偏移量とに基づき、実際に受信する電波の周波数を検出して測定周波数を補正し、方探受信機3に対して補正した測定周波数を設定する。
(もっと読む)
レーダ信号処理装置及びレーダ装置
【課題】I/Q検波回路で行われていたI/Q検波を、ハード規模の増加なく、処理の遅延を抑え、ソフトウェア処理により実行することが可能なレーダ信号処理装置及びそのレーダ信号処理装置を用いたレーダ装置を提供する。
【解決手段】アナログ−デジタル変換部から出力されるデジタル信号に対して、DSP20においてFFT処理21を行うことで、入力信号を所定の大きさのデータにブロック化する。そして、このブロック化された信号に対して零埋め処理22及び周波数シフト処理23を施した後、逆FFT処理24を行うことでI/Q信号を生成するようにしている。生成されたI/Q信号は、所定のクロック周波数に近づくべく、間引き処理25される。これにより、入力されるデジタル信号をブロック単位で処理することが可能になるため、I/Q検波をソフトウェア処理で行う際に、演算量の増加を抑えることが可能となる。
(もっと読む)
物体検知装置
【課題】 FM・CW型の物体検知装置でターゲットを一旦ミスペアリングした場合に、正しいペアリングのデータを遅滞なく出力して制御の応答性を高める。
【解決手段】 今回ペアリング候補選定手段S9は、今回相対関係および前回相対関係が同一の物体に基づくものか否かを判定し、同一の物体に基づくものと判定された場合に、今回相対関係の算出および前回相対関係の算出に用いられたペアリング候補を正しいペアリング組み合わせとして確定する。ペアリングフィードバック処理手段S10は、今回相対関係および前回相対関係が同一の物体に基づくものではないと判定された場合に、組み合わせが確定していないペアリング候補に基づいて前回相対関係を更新する。このように、今回相対関係および前回相対関係が同一の物体に基づくものではないと判定された場合に、前回相対関係に遡って今回相対関係の正誤を検証するので、正しい今回相対関係を速やかに確定させて制御の応答性を高めることができる。
(もっと読む)
任意信号発生装置
【課題】比較的低い周波数のサンプリング周波数を用いつつ、生成する信号の周波数帯域を拡張し、より高周波域までの任意波形の信号を生成可能とする。
【解決手段】目的信号を離散フーリエ変換した周波数領域の複素スペクトルをP組の信号成分に分割し、低サンプリングクロックで動作するP個の信号モジュールSG1,SG2,SG3,…,SGPに分配して分割処理し、それぞれの出力を合成することにより、任意信号を生成する。各信号モジュールは、分配された信号成分を逆離散フーリエ変換器10で逆離散変換し、デジタル信号処理の困難な高周波成分は、逆離散フーリエ変換出力を直交変調器17でアップコンバートする。これにより、並列数Pに反比例した低速のクロックで各信号モジュールSG2,SG3,…,SGPを動作させることができる。
(もっと読む)
レーダ装置
【課題】ターゲットの方向や個数を正しく算出できるレーダ装置を得る。
【解決手段】方向算出部32は、ターゲット40の複数変調区間のピーク周波数が0付近である場合に、ピーク周波数が0付近のピーク周波数スペクトラムから生成される共分散行列の加算を禁止する共分散行列加算禁止部33を有し、ピーク周波数が0付近外のピーク周波数スペクトラムから生成される共分散行列を加算した加算共分散行列に基づいてターゲット40の方向を算出する。
(もっと読む)
レーダ装置
【課題】短時間で高精度にターゲットの方向を算出できるレーダ装置を提供する。
【解決手段】複数変調区間を有する送信信号を送信する送信手段と、前記送信信号がターゲットで反射された反射信号を複数のチャネルを有するアレーアンテナで受信する受信手段と、前記送信信号と複数チャネル分の受信信号とをそれぞれミキシングして複数チャネル分のビート信号を得るミキシング手段と、前記複数チャネル分のビート信号をそれぞれ周波数解析する周波数解析手段と、前記複数チャネル分の周波数解析結果に基づいて、前記ターゲットの方向を算出する方向算出手段とを備えたレーダ装置において、前記方向算出手段は、前記複数変調区間のピーク周波数スペクトラムから生成される共分散行列を加算した加算共分散行列に基づいて前記ターゲットの方向を算出することを特徴とするレーダ装置。
(もっと読む)
レーダ送受信機、及びレーダ装置
【課題】 ビート信号のレベルに基づきアップビート周波数とダウンビート周波数のペアリングを確度良く行う。
【解決手段】 レーダ送受信機は、変調期間ごとに所定の周波数変調幅で周波数が上昇する第1の送信信号と、前記変調期間ごとに前記所定の周波数変調幅で周波数が下降する第2の送信信号とを前記変調期間より短いスイッチング周期で交互に切替えて送信し、前記変調期間における前記第1の送信信号とこれに対応する受信信号との周波数差を有する第1のビート信号と、前記第2の送信信号とこれに対応する受信信号との周波数差を有する第2のビート信号とを生成するので、従来、異なる時間帯で生成されていたビート信号を同一の変調期間内にほぼ同時に生成できる。よって、時間差に起因してペアリングすべきアップ/ダウンビート周波数のビート信号にレベル差が生じることがなくなり、ペアリングを確度よく行うことができる。
(もっと読む)
信号処理装置
【課題】センサでの観測データにより未知パラメータを推定する方法に用いる信号数の推定には、従来、経験則による閾値を用いるため、高精度な未知パラメータの推定ができない。
【解決手段】キュムラント行列演算手段で求めた、センサでの観測データの高次統計量に基づくキュムラント行列から、固有値固有ベクトル演算手段が固有値と固有値に対応する固有ベクトルに分解し、符号判定手段が分解された固有値の符号が反転するときまでの固有値数を検出して信号数を推定し、パラメータ推定手段で、符号が反転するときまでの固有値に対応する固有ベクトルを用いて、未知パラメータを推定する。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】 ビート信号の高調波に起因する目標物体の誤検出を回避し、かつビート信号のレベルが低い目標物体の検出漏れを回避する。
【解決手段】信号処理装置は、CW期間におけるビート信号のレベルを、前記ビート信号をA/D変換する受信回路の飽和レベルより低いレベルに低下させる信号レベル制御手段を有するので、CW期間では高調波に起因する誤検出が生じない。そして、距離・速度検出手段は、CW期間で検出した相対速度に基づいてFMCW期間での相対速度及び相対距離から目標物体の相対速度及び相対距離を検出するので、FMCW期間で高調波に起因する誤検出を回避し、さらにビート信号のレベルが低い目標物体の検出漏れを回避できる。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】ランダムに検出される検出位置情報に基づいて、正確に物体の進行方向および速度を検出できるようにする。
【解決手段】検出位置特定部81は、検出された物体の検出位置における速度、距離、および角度に基づいて、物体の相対的な検出位置を特定し、含有数カウント部86は、物体の相対的な検出位置を時刻に対応付けて、水平方向の検出位置を示す軸と進行方向の検出位置までの距離を示す軸とで設定される2次元の平面上にプロットし、物体の進行方向の先頭部分が所定時間内に通過すると予想される平面上の形状からなるフレームを所定の回転角度で回転させながら、回転角度毎にフレーム内に含まれるプロットされた検出位置の数をカウントし、方向決定部87は、カウントされたプロット数が最大となるフレームの回転角度に基づいて、物体の存在する存在位置、および進行方向を決定する。本発明は、車両安全装置に適用することができる。
(もっと読む)
レーダ装置
【課題】複数個のレーダの電波干渉を抑えることのできるレーダ装置を提供する。
【解決手段】レーダ装置1は、レーダ11、12、制御装置9を備え、制御装置9は、レーダ11、12の波形パターンを制御する。信号処理装置23は、制御装置9の指示を受けて、波形メモリ24からFM−CWモード3、CWモード4のVCO25の周波数変調パターンを選択してモード切換230を行い、送信アンテナ21から電波を出力する。そのとき、レーダ11、12で出力する連続波の信号の周波数が、互いに同じ周波数になる時間が連続しないよう、制御装置9は、それぞれの上記レーダの周波数変調パターンまたは当該パターンの出力タイミングを信号処理装置23に指示する。
(もっと読む)
レーダ装置
【課題】不要電波の送信を抑制するとともに、車両が停車時でも先行車両を検出する。
【解決手段】車両に搭載され所定の走査範囲をレーダ波で走査するレーダ装置は、前記車両の走行速度が第1の速度のときには、前記走査範囲内で第1の単位角度ごとにレーダ波を送信し、前記走行速度が前記第1の速度より遅い第2の速度のときには、前記走査範囲内で前記第1の単位角度より広い第2の単位角度ごとに前記レーダ波を送信する送信制御手段と、前記送信されたレーダ波の目標物体による反射波に基づいて前記目標物体を検出する目標物体検出手段とを有するので、レーダ装置全体としては不要なレーダ波の送信を抑制できるとともに、近距離の目標物体に対してはこれを検出するために必要なレーダ波の反射点を得ることができる。
(もっと読む)
レーダ装置
【課題】軽い演算負荷で干渉信号の影響を低減できるレーダ装置を提供する。
【解決手段】制御演算部は、送信信号と反射信号とを混合部で混合したビート信号を逐次サンプリングして取得する。制御演算部は、取得したビート信号に基づき、ビート信号に干渉信号が含まれる干渉期間を特定する。干渉期間を特定すると、制御演算部は、特定した干渉期間を除く期間で取得したビート信号に対してFFT処理をした結果に基づき、対象物との相対距離、及び相対速度を測定する。
(もっと読む)
レーダ装置の制御方法、レーダ装置、プログラム
【課題】レーダ装置において、対象物の測定精度を向上させる。
【解決手段】FM−CWレーダ機能とパルスレーダ機能とを併せ備えたレーダ装置において、FM−CWレーダ機能による対象物の測定(ステップ121)と、FM−CWレーダ機能で得られた距離データの部分だけでのパルスレーダ機能による測定と、これらの測定結果の比較(ステップ122)と、パルスレーダ機能で、FM−CWレーダ機能の測定結果の距離に対象物を検知できない場合、矛盾があった距離データの電力ピーク値の近傍のスライス値(Th1)を下げて行う再度のピーク探索と再ペアリング(ステップ124)とにより、レーダ装置による対象物の距離や速度の測定精度を向上させる。
(もっと読む)
レーダ装置
【課題】超分解能測角処理時に、不要な他の信号が混入して誤った方位角が得られることがある。
【解決手段】複数目標との相対距離や相対速度を算出し、超分解能測角処理を行う演算装置13を用いて方位角を測定するレーダ装置において、前記演算装置13は、検出したある目標について、2つの方位角が得られた場合、検出した他の目標の中から、方位角が前記2つの方位角のいずれかに等しく、かつ上昇または降いずれかの変調時にビート信号の周波数が等しい目標を探す他信号検出処理を行い、前記他信号検出処理により、条件を満たす他の目標が検出された場合には、前記検出したある目標の2つの方位角のうち、他信号検出処理により検出された他の目標の方位角と等しい側の方位角を削除するようにした。
(もっと読む)
車載用レーダシステム
【課題】
従来技術によれば、リアルタイムでターゲット検知情報の信頼性判断をすることができない、という課題がある。
【解決手段】
当該車載用レーダシステムは、第1の電波を送信する送信手段と、第1の電波がターゲットから反射される第2の電波を受信し受信信号を得る受信手段と、受信信号に基づいて、前記ターゲットまでの距離,相対速度、及び角度を算出する算出手段と、ターゲットまでの距離,相対速度、及び角度を検出できる第一の領域と、ターゲットまでの距離、及び相対速度のみを検出できる第二の領域とを有する第一及び第二のレーダを備え、算出手段は、第一のレーダの有する第二の領域及び第二のレーダの有する第二の領域が重畳する第三の領域において、ターゲットまでの距離,相対速度、及び角度を算出する。
(もっと読む)
パケット検出装置及びパケット検出方法、パケット検出装置及びパケット検出方法、距離測定装置及び距離測定方法、通信装置、コンピューター・プログラム
【課題】受信先端末からの返信パケットの到着時刻をディジタル処理におけるサンプリング・クロックよりも高い精度で判別する。
【解決手段】送信側と同じ特性のディジタル・フィルターのタップ係数を、クロック幅よりも細かい複数のタイミングでシフトさせ、各フィルターに通して複数種類の既知パターンをあらかじめ作成し保存しておく。そして、受信信号との複数種類の既知パターンの各々と相互相関を演算し、最大の相関値となる既知パターンに対応するタイミングをパケットの到来時刻と推定する。サンプリング・クロック幅よりも高い精度でのパケット位置の到着を推定可能になる。
(もっと読む)
レーダ装置
【課題】物標情報を高精度に求めることが可能なレーダ装置を提供すること。
【解決手段】本発明が適用されたレーダ装置は、FMCW方式のレーダ装置であり、変調周期毎に、受信結果を表すビート信号からスナップショットデータを生成する。また、各変調周期のスナップショットデータから生成した変調周期毎の自己相関行列を、複数周期分平均化し、その平均化後の自己相関行列に基づき、MUSIC法により物標方位を求める。但し、平均化は、各変調周期のスナップショットデータに含まれる雑音成分の量(干渉量)に基づき、加重平均により行う。即ち、各変調周期の自己相関行列に作用させる重み付け係数を、その変調周期の干渉量に応じた値に設定する(S570)。干渉量が小さい場合には重み付け係数を大きく、干渉量が大きい場合には、干渉量を小さくといった具合である。
(もっと読む)
信号処理装置、及びレーダ装置。
【課題】 機械走査方式のレーダ装置においてアンテナが所期の反転位置からずれた位置で反転したときでも精度よく回動角度を検出する。
【解決手段】所定の角度範囲内で往復回動する回動部が単位角度回動するときに角度信号が入力される信号処理装置であって、前記角度信号の状態遷移に基づいて前記回動部の回動方向の反転を検出する反転検出手段と、前記反転を検出した後に入力される前記角度信号に基づき前記回動部の回動角度を検出する回動角度検出手段とを有し、前記回動角度検出手段は、前記反転検出手段により前記回動部の第1の反転が検出された後第2の反転が検出されるまでに入力された前記角度信号に基づき、前記第2の反転が検出された後に入力される角度信号に基づく回動角度を補正するので、所期の反転位置からの角度信号に基づく回動角度を検出できる。
(もっと読む)
341 - 360 / 880
[ Back to top ]