
Fターム[5J070AH35]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フーリエ変換を行なうもの(DFT、FFT、IFFT) (880)
Fターム[5J070AH35]に分類される特許
161 - 180 / 880
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】検出精度を低減させることなく、高い精度で受信波の到来方向の検出を行う電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】周波数分解処理部22は、送信波及びターゲットから到来する受信波からビート信号に基づいた複素数データを算出する。ターゲット検知部31は、ビート周波数の強度値からピーク値を検出してターゲットの存在を検知する。ターゲット連結処理部32は、現在及び過去の検知サイクルにおいて検出される前記ターゲットを関連付ける。方位検出部30は、複素数データに基づく生成複素数データを、データ生成手段に対応させて生成し、アンテナ毎に、ターゲットの存在が検知されたビート周波数の複素数データ、及び、生成複素数データを用いてそれぞれ作成された正規方程式に基づいて受信波の到来方向を算出する。
(もっと読む)
車載レーダ装置

【課題】付着物検知手段で、レドームの付着物が検出された場合に、付着物が一時的にレドームに付着している状態か、定常的にレドームに付着している状態かを判別する車載レーダ装置を得る。
【解決手段】付着物検知手段16はレドーム6の付着物7による反射波の時間的変動を検出するレドーム反射変動検出部を備え、付着物検出手段16によりレドーム6の付着物7が検出された場合に、レドーム反射変動検出部により、レドーム6の付着物7による反射波の時間的変動が大きいときは、レドーム6に一時的に付着物7が付着したと判断し、レドーム6の付着物7による反射波の変動が小さいときは、レドーム6に定常的に付着物7が付着したと判断する。
(もっと読む)
レーダ装置及び目標探知方法
【課題】被探知目標を正確に探知する開口合成技術を実現する。
【解決手段】レーダ装置は、複数の受信アンテナで受信された各エコー信号から生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成する信号合成部と、複数の送信アンテナのアレイ多項式と複数の受信アンテナのアレイ多項式との積から得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得する補正データ取得部と、この補正データを用いて当該合成ベースバンド信号ベクトルを補正する補正部と、この補正部により補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行う推定部と、を備える。
(もっと読む)
FM−CWレーダ装置
【課題】ビット数の少ないAD変換器を用いて目標物を検出するFM−CWレーダ装置を得ること。
【解決手段】送信波と反射波との周波数差の信号であるビート信号の出力先を切り替えるアナログスイッチ12と、ビート信号に対して最も広い通過特性を持つバンドパスフィルタ13と、ビート信号に対して所望の周波数以下の帯域を減衰させる特性を持つバンドパスフィルタ14と、アナログスイッチ12がビート信号の出力先としたバンドパスフィルタを入力元とする接続の切り替えを行うアナログスイッチ15と、通過したバンドパスフィルタの特性に応じた利得でビート信号を増幅する利得制御増幅器16と、ビート信号を通過させるバンドパスフィルタを決定して各アナログスイッチへ通知し、さらに、当該バンドパスフィルタの特性に基づいて利得制御増幅器16の利得の大きさを決定する制御部17と、を備える。
(もっと読む)
距離測定装置
【課題】距離測定装置において、距離測定の信頼性の向上を図る。
【解決手段】距離測定装置においては、周波数制御回路により周波数掃引される送信波と反射波との合成波のパワーが検出され、その検出信号の周波数成分が、分析回路により分析され、その分析結果を基に距離が算出される。周波数制御回路は上記発振周波数の掃引を複数回行う。そして、各回に距離算出回路により算出される距離データのうち、全ての回に存在する距離データが距離判定回路により真値と判定される。これにより、複数回の発振周波数掃引のいずれかの回で、外来ノイズ又は干渉等に起因して、誤った距離データが距離算出回路により算出されたとしても、他の回の周波数掃引時に誤った距離データが算出されなければ、距離判定回路は誤った距離データを真値と判定しない。従って、真値と判定される距離データに誤差が生じ難くなり、そのため、距離測定の信頼性の向上を図ることができる。
(もっと読む)
移動体周辺監視システム
【課題】複数の距離測定センサを備えた移動体周辺監視システムにおいて、各距離測定セ
ンサにより高精度に障害物までの距離を測定し、しかも、製造コストを低減する。
【解決手段】移動体周辺監視システムにおいて、センサ制御装置は、各距離測定センサに
よる距離測定範囲に対応した周波数掃引幅の掃引パターンを記憶している。センサ制御装
置は、各距離測定センサに、その取付位置に応じて距離測定範囲を設定し、その距離測定
範囲に対応する周波数掃引幅の掃引パターンP1、P2、P3に従ってセンサ内の信号源
の発振周波数を掃引させる。これにより、各距離測定センサの取付位置に応じた夫々の距
離測定範囲で各距離測定センサにより高精度に距離を測定することができる。しかも、上
記掃引パターンはセンサ制御装置が記憶しているので、各距離測定センサはその構成を共
通化することができる。
(もっと読む)
移動体周辺監視システム
【課題】送信波を放射することにより障害物を検知する複数の検知センサを備えた移動体周辺監視システムにおいて、各検知センサ間の干渉を抑制し、検知精度の向上を図る。
【解決手段】各検知センサ2は、信号源20の発振周波数を掃引する周波数制御回路21と、上記発振周波数と同じ周波数の送信波を放射する送受信回路22と、電源制御回路24とを備える。電源制御回路24は、上記発振周波数が掃引される期間だけ、上記送信出力をオンし、他の期間は、上記送信出力をオフする。従って、いずれかの検知センサ2で上記発振周波数が掃引され上記送信出力がオンであるときに、他の検知センサ2で上記発振周波数が掃引されていなければ、他の検知センサの上記送信出力はオフされている。このため、各検知センサ2の送信波又は反射波と他の検知センサの送信波又は反射波との間の干渉の発生を防ぐことができ、検知センサ2の検知精度の向上を図ることができる。
(もっと読む)
距離測定装置
【課題】距離測定装置において、測定期間の延長及び製造コストを抑えながら、測定可能な距離範囲を近距離側にも遠距離側にも拡げる。
【解決手段】距離測定装置においては、周波数制御回路により周波数掃引される送信波と反射波との合成波のパワーが検出され、その検出信号が、分析回路により、特定の処理期間、サンプリングされ、その周波数成分が分析される。そして、その分析結果を基に距離が算出される。上記周波数制御回路は、周波数掃引幅が互いに異なる掃引パターンP1、P2、P3の各々に従って掃引する。従って、測定対象物までの距離が、近、中、遠距離のいずれであっても、上記検出信号の周波数を、分析回路により分析可能な周波数範囲内に収めることができ、各距離を測定することができる。しかも、近/遠距離側の測定範囲を拡げるために、上記処理期間を延ばしたり、分析回路を高速度の演算が可能なものにしたりしなくて済む。
(もっと読む)
誘導装置
【課題】
HPRF(High Pulse Repetition Frequency)の電波にて目標を探知・追尾する従来の誘導装置においては、メインローブクラッタと目標のドップラ周波数が重なる領域(ビーム領域)では、メインローブクラッタと目標の区別がつかず、メインローブクラッタを誤検出する可能性があるため、あらかじめメインローブクラッタの周波数領域を算出し、その領域内は探知しないようにしているため、クラッタのレベルが低く、実際は目標を探知できる場合があったとしても、探知できないという課題がある。
【解決手段】
従来は受信部と局部発振部が1セットであったが、複数の受信部と局部発振部のセットを有することで、目標からの反射信号とクラッタを弁別することができ、ビーム領域の目標を探知することを可能にするものである。
(もっと読む)
車載用レーダ装置及び車載用レーダシステム
【課題】多周波変調異常を検出する機能を有する車載用レーダ装置を提供する。
【解決手段】2周波CW変調処理部101のように、送受信信号のIF信号に位相差が発生するような変調処理方式と、FM変調処理部102のように、送受信信号から得られるドップラ周波数がターゲット距離に応じて変動するような特性を持つ変調方式を有し、前記位相差から算出されるターゲット距離と、前記ドップラ周波数の変動量から算出されるターゲット距離の差分が所定値以上になった場合、多周波変調処理が異常であると判断することができる。
(もっと読む)
船舶識別装置
【課題】大規模な処理装置等を実装することなく、他の船舶に成りすましている不審船を検出することができるとともに、精度よく船舶の個体識別を行うことができるようにする。
【解決手段】信号特性照合部17により信号特性が合致していると判定された場合、AIS受信機14により受信されたAIS信号を発信しているAIS装置が搭載されている船舶については利用者IDに係る船舶であると判別し、信号特性照合部17により信号特性が合致していないと判定された場合、あるいは、その利用者IDがデータベース15に登録されていない場合、上記AIS装置が搭載されている船舶については不審船であると判別する。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置では、方位角、仰角によらず同じ抑圧帯域幅を持つクラッタ抑圧フィルタを使用していたため、特にアンテナビームが正面方向の場合において低速接近目標や横行目標、離隔目標に対する目標検出感度が劣化するという課題があった。
【解決手段】 アンテナビームの方位角および仰角の情報を抽出し、アンテナビーム角度によって変化するクラッタ形状に応じて最適なフィルタ荷重を決定することで、アンテナビームが正面方向の場合においても低速接近目標や横行目標、離隔目標に対する目標検出性能の改善を図ることができる。
(もっと読む)
気象レーダ信号処理装置及びそのグランドクラッタ除去方法
【課題】MTI処理後のグランドクラッタの消え残りと気象エコーとを高精度に区別する。
【解決手段】MTI処理A1により、目標反射波受信信号のIQデータからグランドクラッタ成分を除去することで気象エコー成分を抽出する。続いて、スペクトル評価処理A2により、気象エコー成分から順次正規化したパルスペア合成ベクトルを求め、そのパルスペア合成ベクトルの総和の絶対値からスペクトルの平坦さを評価する評価指標を算出し、この評価指標に基づいてグランドクラッタの除去と気象エコーの保持を行う。最終的に、ノイズ除去処理A3により、処理A2の評価指標に対する振幅成分の電力値に対する閾値処理を行って孤立点を除去することでノイズを除去する。このようにしてスペクトルの平坦さを評価し、この評価指標に対する閾値処理によりグランドクラッタ除去を行う。
(もっと読む)
レーダ装置及びコンピュータプログラム
【課題】側方対象物の誤検知を防ぐことができるレーダ装置を提供する。
【解決手段】電波を送信する送信アンテナ14と、送信された電波が対象物により反射された電波を受信する複数の受信アンテナ15と、受信アンテナ15で受信された各受信信号と送信アンテナ14で送信した送信信号とを混合して受信アンテナ15毎にビート信号を生成するビート信号生成部と、各ビート信号の信号強度に、受信アンテナ15毎に関係付けられた所定の重みをかけ、ビート信号の信号強度を変更する重み付け処理部17と、重み付け処理部17により信号強度が変更されたビート信号に基づいて、対象物の方位を検出する方位検出部19と、を備える。
(もっと読む)
レーダ画像処理装置
【課題】干渉信号の帯域幅によらず、合成開口レーダの受信信号から干渉信号を抑圧することによって、合成開口レーダ画像の劣化を防止可能なレーダ画像処理装置を得る。
【解決手段】合成開口レーダ画像に相当する第1の空間周波数領域の信号の非干渉帯域の信号に対して、2次元超解像法により超解像画像を生成し、超解像画像に相当する第2の空間周波数領域の信号を算出する2次元超解像処理手段4と、第2の空間周波数領域の信号を所定の関数で変換し、干渉信号を抑圧する干渉信号抑圧フィルタを生成する干渉信号抑圧フィルタ生成手段5と、干渉信号抑圧フィルタにより、合成開口レーダ画像から干渉信号が抑圧された画像に相当する第3の空間周波数領域の信号を算出する抑圧後信号算出手段と、第3の空間周波数領域の信号に対して、2次元IFFT処理により干渉信号が抑圧された合成開口レーダ画像を生成する2次元IFFT手段8とを備える。
(もっと読む)
レーダ装置、物標速度検出方法、及び、物標速度検出プログラム
【課題】不定性を生じさせることなく、物標の相対速度を広範囲にわたって検出可能なレーダ装置を提供する。
【解決手段】船舶用レーダ装置は、信号発生部と、送信タイミング制御部と、相関処理部と、速度検出部と、を備える。信号発生部は、送信パルス信号を発生させる。送信タイミング制御部は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理部は、送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。速度検出部は、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】コヒーレント積分を行う場合において、干渉成分による影響を軽減した信号処理装置を提供する。
【解決手段】ソート処理部153は、振幅値に応じてデータ列を並び替える処理を行う。閾値検出部154は、ソート処理部153によって並び替えられたデータ列の中から、振幅値の小さい順に複数点のデータを選択する。そして、閾値検出部154は、選択したデータの平均値を算出し、この平均値に所定の係数αを掛けた値を閾値として算出する。ゼロ置換処理部151は、閾値検出部154から入力された閾値と、各データの振幅値とを比較する。閾値以上の振幅値を示すデータが存在した場合、そのデータ(スイープメモリ13から入力した複素信号)を0に置換し、コヒーレント積分処理部161に出力する。閾値未満の振幅値を示すデータは、スイープメモリ13から入力した複素信号をそのままコヒーレント積分処理部161に出力する。
(もっと読む)
自動車用レーダ・システムおよび方法
【課題】 アンテナ・ビームの各々における距離ゲートを変化させることによって、検出ゾーンのカバレッジを可変とする。
【解決手段】 レーダ検出プロセスは、FFT出力信号の導関数を計算し、指定検出ゾーン内において物体を検出することを含む。一実施形態では、FFT出力信号の二次導関数におけるゼロ交差が物体の存在を示す。物体の距離は、ゼロ交差が発生した周波数の関数として判定する。また、各レーダ・ビームおよび処理サイクルにおいて物体の有無を示す指標を収容した検出表についても記載する。このような指標を少なくとも2つ組み合わせて、検出ゾーンにおける物体の有無を検出する。
(もっと読む)
低電力空間結合フェーズドアレイレーダー
【課題】低電力空間結合フェーズドアレイレーダーを提供する。
【解決手段】レーダーシステムが取り付けられるか、又は組み込まれる構造にレーダーシステムを適合させることができるようにする複数の小型レーダーである。レーダーシステムは、クロックと、クロックと通信する複数の周波数変調/持続波(FM/CW)又はパルス圧縮レーダーユニットと、複数のFM/CWレーダーユニットと通信するプロセッサとを備える。複数のFM/CWレーダーユニットはそれぞれ一列のアンテナ素子を含む。
(もっと読む)
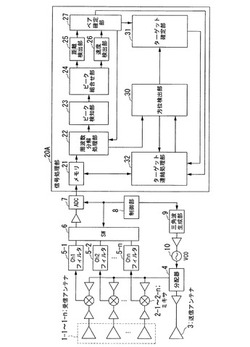
レーダ装置及びコンピュータプログラム
【課題】レーダで検知した対象物が低背検知対象物であるか否か判別することができる電子走査型レーダ装置を提供する。
【解決手段】電波を送信する送信アンテナ3と、前記送信された電波が対象物により反射された電波を受信する受信アンテナ11から1nと、前記受信された電波に基づいて前記対象物までの距離を検出する距離検出部24と、前記検出した距離の関数として、前記受信された電波の電力を算出する受信電力算出部22と、所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部28と、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部29と、を備える。
(もっと読む)
161 - 180 / 880
[ Back to top ]