
Fターム[5J070AH39]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フィルタ手段 (829)
Fターム[5J070AH39]の下位に属するFターム
Fターム[5J070AH39]に分類される特許
121 - 140 / 541
車両ドライバ支援装置およびレーダ装置操作方法
物標認識装置
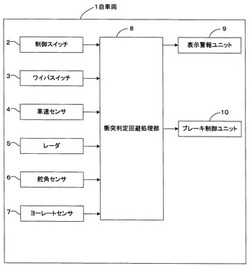
【課題】レーダがオフセット搭載されている場合に、自車両に接近する物標が衝突しないと誤判断するのを防止して物標検出精度を向上する。
【解決手段】衝突判定回避処理部8により、自車両1と物標200との距離がレーダ5の水平方向の検知角と搭載位置のオフセット量とに基づいて設定された所定距離以内になったか否かを判定し、所定距離以内に物標200が接近したときに、物標200が近づくにつれて略自車両1の車幅に設定される衝突判定領域を前記検知角に応じてレーダ5の搭載位置側へ拡大修正する。
(もっと読む)
偽像低減装置、レーダ装置、偽像低減方法、および偽像低減プログラム

【課題】画像処理を行うことによりビームサブ偽像を低減する偽像低減装置を提供する。
【解決手段】ビームサブ偽像検出部154は、各距離における極座標画像データについて、所定レベル以上の値を示す画素がスイープ方向に連続する数を算出し、連続スイープ数が閾値Th以上であれば、偽像候補として抽出する。また、ビームサブ偽像検出部154は、偽像候補の方位方向の幅と、距離方向の幅とに基づいて、ビームサブ偽像を検出する。
(もっと読む)
低電力空間結合フェーズドアレイレーダー
【課題】低電力空間結合フェーズドアレイレーダーを提供する。
【解決手段】レーダーシステムが取り付けられるか、又は組み込まれる構造にレーダーシステムを適合させることができるようにする複数の小型レーダーである。レーダーシステムは、クロックと、クロックと通信する複数の周波数変調/持続波(FM/CW)又はパルス圧縮レーダーユニットと、複数のFM/CWレーダーユニットと通信するプロセッサとを備える。複数のFM/CWレーダーユニットはそれぞれ一列のアンテナ素子を含む。
(もっと読む)
レーダ装置及びコンピュータプログラム
【課題】レーダで検知した対象物が低背検知対象物であるか否か判別することができる電子走査型レーダ装置を提供する。
【解決手段】電波を送信する送信アンテナ3と、前記送信された電波が対象物により反射された電波を受信する受信アンテナ11から1nと、前記受信された電波に基づいて前記対象物までの距離を検出する距離検出部24と、前記検出した距離の関数として、前記受信された電波の電力を算出する受信電力算出部22と、所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部28と、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部29と、を備える。
(もっと読む)
レーダ装置
【課題】相関処理をするときに生じるノイズの影響を低減できるレーダ装置を低コストで提供する。
【解決手段】符号化された信号を符号信号として送信する送信手段と、符号信号が対象物で反射した反射信号を受信する受信手段と、送信手段から送信される符号信号を符号化するときの符号と同一の符号を比較符号として記憶する記憶手段と、符号と同一の比較符号と、反射信号から復号した符号とのいずれか一方の連続する複数の符号の中で予め定められたN番目の符号と、いずれか他方の符号との相関に基づいて対象物を測定する測定手段と、N番目の符号と他方の符号との相関に基づいて対象物を測定した後、N+1番目以降の符号と他方の符号との相関に基づき、測定手段によって計算された測定結果の中で誤った測定結果があるか否か判断する判断手段とを備える。
(もっと読む)
追尾レーダ装置
【課題】地図情報を用いて不要反射波からの目標誤検出を低減することにより、追尾維持率の改善を図る。
【解決手段】検出処理部31は、地図情報記憶装置50から現在観測中の地域の地図情報を読み出し、当該地図情報から追尾目標の反射波と誤認識する不要反射波を発生する領域を追尾対象外として区分けするプロット検出用フィルタ(52,54,55)を作成し、当該プロット検出用フィルタ(52,54,55)に基づいて追尾対象外の領域を除いた領域からの反射波についてのプロットのみを検出する。
(もっと読む)
レーダーシステム及びその製造方法
送信アセンブリ(10)、受信アセンブリ(20)、制御部(30)及び信号処理部(40)を含むレーダーシステム(100)について述べる。送信アセンブリ(10)は、入力信号(31)を受信し、入射レーダー信号(2)を送信する。送信アセンブリ(10)は、レンズキャビティ(74)、複数のビームポート(60)、複数のアレイポート(62)及びパッチアンテナアセンブリ(14)を有するRotmanレンズ(12)を含む。レンズキャビティ(74)は、10ミクロン〜120ミクロン、好ましくは40ミクロン〜60ミクロンのレンズギャップ(h)を有する。パッチアンテナアセンブリ(14)は、Rotmanレンズ(12)から複数の時間遅延同相信号を受信し、入射レーダー信号(2)をターゲット(4)に向けて送信するように動作可能な複数のアンテナアレイ(130)を含む。受信アセンブリ(20)は、反射レーダー信号(6)を受け取り、出力信号を生成する。信号処理部(40)は、入力信号(31)を出力信号と比較し、ターゲット(4)のレンジ、速度及び位置を決定するアルゴリズムを実施する。 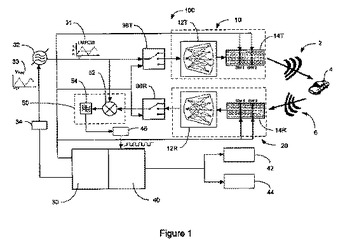 (もっと読む)
(もっと読む)
レーダ装置、物体検知システム、および、物体検知方法
【課題】レーダ装置で異なる物体情報を一つの物体と誤判定することを防止する技術を提供する。
【解決手段】第1の走査の代表検知点が第2の走査において存在しない場合、第1の走査において検知された代表検知点の次に車両に近い検知点を第2の走査における代表検知点に設定する。この第2の代表検知点が、第1の走査の代表検知点の位置から遠方側に所定距離以上に離れた位置に存在する場合は、第1の代表検知点と第2の代表検知点とを異なる物体の情報と判定する。これにより、異なる物体を一つの物体と誤判定することに起因する物体の移動方向の誤った判定を防止できる。
(もっと読む)
レーダ信号処理装置
【課題】レーダ信号処理装置がクラッタを抑圧し目標検出するときに、誤警報率を低く一定に抑えつつ、信号処理負荷を低減し規模を抑制する。
【解決手段】受信信号は、コヒーレント積分を行なうCINT処理系31と、MTI(移動目標指示)処理を行なうMTI処理系32に分配される。受信ビデオ選択部17にて、例えば操作員が目標、クラッタ、信号処理負荷などの状況を考慮していずれかの処理系信号を選択する。CFAR処理を用いずに作成したクラッタマップデータ10を参照して目標検出するときに、対象がクラッタ領域のときはCFAR処理に、クラッタフリー領域のときは固定スレッショルド検定に切替える処理切替部11、12を備える。この結果、処理負荷が高く規模の増大に繋がるCFAR処理を、クラッタ領域のときに限定して実施することにより、信号処理負荷を低減し、誤警報率を低く抑えつつ装置規模を抑制できる。
(もっと読む)
気象レーダ信号処理装置及びそのグランドクラッタ除去方法
【課題】MTIと速度幅フィルタについて有効なパラメータを自動的に求める。
【解決手段】予め設定されたMTIパラメータに基づいて目標反射波の受信信号からグランドクラッタ成分を演算し除去するMTI処理器A1と、前記グランドクラッタが除去されたMTI処理後の信号を予め設定された速度幅パラメータを基づく閾値と比較して、MTI処理後の信号に含まれる気象エコー成分を抽出する速度幅フィルタA2と、前記速度幅フィルタの出力から気象情報を得る気象情報演算部A3とを備え、レーダ設置地点での観測データ及び模擬気象エコーを用いて前記MTIパラメータ及び速度幅パラメータの最適値を自動探索し、自動探索されたMTIパラメータ及び速度幅パラメータを事前にMTI処理器A1及び速度幅フィルタA2に設定することで、オフラインでのシミュレーションによるパラメータ調整を自動化する。
(もっと読む)
物体検知装置および物体検知方法
【課題】相互に属性が異なる複数の物体の存否、位置、変位または属性の検知ないし測定を簡単な構造により高精度に行うと共に、相互に属性が異なる複数の物体を確実に識別する。
【解決手段】発振器11から発せられる基本送信信号から相互に周波数が異なる複数の単位送信信号を生成し、これらの単位送信信号を合成して合成送信波として送信する。そして、検知対象物に反射した合成送信波の反射波を受信し、この反射波を周波数ごとに分離して複数の単位受信信号を生成し、複数の単位送信信号と複数の単位受信信号とを周波数ごとにそれぞれ重畳することにより形成される複数の定在波のそれぞれの振幅値に基づいて検知対象物の存否、位置、変位および属性を検知する。
(もっと読む)
リミッタ回路
【課題】高いリーケージ抑圧特性およびフィルタ特性を有するレーダ装置用のリミッタ回路を提供する。
【解決手段】マイクロ波帯で使用するPINダイオードを用いたリミッタ回路であって、一端がRF主線路に接続されて寄生成分を打消すキャパシタ(6aまたは6b)と、このキャパシタ(6aまたは6b)の他端に接続されたアンチパラレル接続のPINダイオード接続体(7aと8aの接続体、または7bと8bの接続体)を備え、このキャパシタとPINダイオード接続体は、RF主線路とグランド間で直列に接続されている。
(もっと読む)
目標物探知装置および目標物探知方法
【課題】目標物が停止したのか失探したのかを判別して、追尾の誤りを削減することを目的とする。
【解決手段】ドップラ効果を利用して目標物が探知するレーダ装置の監視領域を分割した複数の分割範囲ごとに、電波到達可能であるか否かを示す電波到達可否情報と、ドップラ効果が有るか無いかを示すドップラ情報を関連付けて記録し、最後に探知された目標物の追尾結果を示す追尾情報と今回探知した目標物の探知結果を示す探知情報を用いて、最後に探知した目標物と今回探知した目標物とを関連付け、追尾処理が中止された対象の最後に探知された目標物の追尾情報に含まれる位置情報を参照して、最後に探知された目標物が含まれる分割範囲を検知し、該分割範囲において電波到達可能か否かとドップラ効果の有無を判定して、最後に探知された目標物が停止したかを判定する目標物探知装置および目標物探知方法である。
(もっと読む)
送受信ビーム形成装置
【課題】目標波電力が低い場合にも精度良くビーム形成することができる送受信ビーム形成装置を得る。
【解決手段】送受信ビーム形成装置は、分配器の出力にそれぞれ送信ビーム荷重を乗算する送信用乗算器と、受信器の出力に受信ビーム形成荷重を乗じる受信用乗算器と、受信用乗算器の出力を合成する合成手段と、合成手段の出力のSNRが最大化するような受信ビーム形成荷重を算出するとともに算出した受信ビーム形成荷重で受信用乗算器を制御する受信荷重制御手段と、受信荷重制御手段で算出された受信ビーム形成荷重を送信ビーム形成荷重とするとともに送信ビーム形成荷重で送信用乗算器を制御する送信荷重制御手段と、を備えた。
(もっと読む)
レーダセンサ
本発明は、相並んで配置された複数のアンテナ素子(41)と、外側のアンテナ素子(41)に繋がった少なくとも1つの給電点(43l、43r)と、を有するアンテナ構成(40)を備えたレーダセンサに関する。アンテナ素子(41)は、遅延区間(42)を介して直列に相互接続される。本発明によれば、レーダセンサは、所定の周波数のレーダ信号を生成し評価することに適した少なくとも2つの送受信ユニット(20)を有する。少なくとも2つの送受信ユニット(20)は、アンテナ構成(40)の給電点(43l、43r)と接続される。少なくとも2つの送受信ユニット(20)のレーダ信号の周波数は、互いに独立して設定可能である。 (もっと読む)
電波到来方向推定装置および電波到来方向推定方法
【課題】電波到来方向を推定するための受信回路の構成を簡略にした、電波到来方向推定装置および電波到来方向推定方法を提供する
【解決手段】複数のアンテナ11は相対的な位置を固定して配置される。受信機1は、複数のアンテナの数より少ない数であって、所定の電波を受信する。時分割スイッチ14は、受信機1に同時には1つのアンテナ11が接続するように、受信機1とアンテナ11との接続を所定の周期で切り替える。直並列変換器4は、受信機1とアンテナ11との接続を所定の周期で切り替えて受信機1で受信した信号を、複数のアンテナ11のそれぞれで受信した信号に分配する。到来方向算出部5は、複数のアンテナ11のそれぞれで受信した信号に分配した信号から、受信した電波の到来方向を算出する。
(もっと読む)
機体座標において目標に対する干渉角を決定するための方法および装置
【課題】航空機機体座標内で目標への物理的角度を求めるためにレーダエコーデータを処理する方法を提供する。
【解決手段】このレーダエコーデータはアンビギュオウスレーダチャネル(226)と左のレーダチャネル(224)で受信されるレーダエコーデータ間の位相差、右のレーダチャネル(228)とアンビギュオウスのレーダチャネル(226)で受信されるレーダエコーデータ間の位相差、および右のレーダチャネル(228)と左のレーダチャネル(224)で受信されるレーダエコーデータ間の位相差を含む。本方法は3つの位相差について位相バイアスを調節するステップ(570、572、574)と、3つの位相差間の位相のアンビギティーを解析することで信号を供給するステップ(576)と、航空機機体座標内で目標への物理的角度を与えるためにその信号をフィルタ処理するステップ(578)とを含む。
(もっと読む)
周波数変調レーダシステム内の干渉を抑制するためのシステムおよび方法
本発明は、第1のマイクロ波放射を放出するための放出器と、第1のマイクロ波放射から引き出される第2のマイクロ波放射を検出するための受信機と、放出器および受信機に接続された制御システムとを有するシステムに関している。第1のマイクロ波放射は、複数の時間ポイントで、これらの時間ポイントに割り当てられた異なる周波数で放出される。時間ポイントと周波数の相関は、ランダムまたは擬似ランダムである。別法または追加として、時間ポイントにおける放出または受信のための時間期間の長さもランダムまたは擬似ランダムである。本発明は、さらに、周波数変調レーダシステム内の干渉を抑制するための方法に関している。 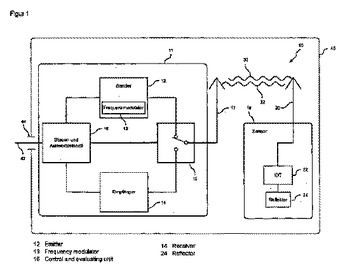 (もっと読む)
(もっと読む)
偽像低減装置、レーダ装置、偽像低減方法、および偽像低減プログラム
【課題】画像処理により偽像を低減する偽像低減装置を提供する。
【解決手段】偽像低減処理部17は、自船に最も近く、物標と判断できる程度の高いエコーレベル(所定のしきい値以上のエコーレベル)を有するエコーの反射物(鏡)とする。偽像低減処理部17は、物標のエコー画像を細線化し、線画像に変換する。偽像低減処理部17は、このようにして得られた線画像の端点を2点抽出し、反射物をこの2点の座標で表すベクトルとして設定する。偽像低減処理部17は、自船の位置と上記端点(端点Aおよび端点B)を結ぶ直線(ラインAおよびラインB)を設定する。そして、反射物の直線とラインA、ラインBで囲まれた領域を偽像領域とする。偽像低減処理部17は、以上の処理を行った後、偽像領域内のエコーレベルを低減する(顔像輝度値を下げる)処理を行い、偽像を低減する。
(もっと読む)
121 - 140 / 541
[ Back to top ]