
Fターム[5J070AH40]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フィルタ手段 (829) | 帯域フィルタ (197)
Fターム[5J070AH40]の下位に属するFターム
Fターム[5J070AH40]に分類される特許
1 - 20 / 183
FMCWレーダ装置
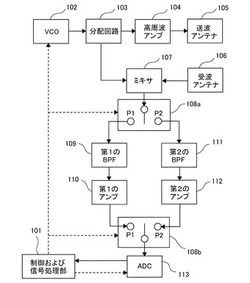
【課題】広い距離範囲に渡って複数のターゲットを検出し、検出した各ターゲットまでの距離および相対速度の測定が可能であるFMCWレーダ装置を提供する。
【解決手段】複数の距離範囲観測期間を設定する手段(101)と、距離範囲観測期間ごとで異なる複数の変調周波数幅を設定する手段(101)と、送信信号と受信信号から距離範囲観測期間ごとにビート信号を生成する手段(107)と、生成されたビート信号の通過帯域幅を設定する手段(109、111)と、通過帯域幅設定手段を通過するビート信号を増幅する手段(110、112)と、増幅されたビート信号をデジタルデータに変換する手段(113)と、距離範囲観測期間ごとに通過帯域幅設定手段および増幅手段を切り替える手段(108a、108b)を備える。
(もっと読む)
遠隔通信装置の間の見通し線(LOS)距離を判定する方法

【課題】送受信器の間の距離を正確に判定する。
【解決手段】遠隔装置から到着信号を受信するように構成された超再生受信器と、到着信号に基づいて遠隔装置までの距離を少なくとも部分的に判定するように構成された回路と、を含む無線通信装置を開示する。超再生受信器は、比較的高い感度で、距離測定回路が到着信号の見通し線(LOS)部分をその非LOS部分から識別することを可能にするように構成される。この回路は、到着信号のLOS部分の時刻を使用して、遠隔装置までの距離をより正確に判定することができる。この回路は、信号を遠隔装置に送信し、遠隔装置から応答信号を受信することによって、信号の送信および受信の各々の時刻から遠隔装置までの距離を判定することができる。
(もっと読む)
侵入検知システム、侵入検知用子機、侵入検知用親機、侵入検知方法および侵入検知プログラム
【課題】検知対象エリア内のどの場所に侵入者が存在するかを特定することが可能な侵入検知システム、侵入検知用子機、侵入検知用親機、侵入検知方法および侵入検知プログラムを提供する。
【解決手段】侵入検知用子機102a,102b,102c,102dが送信する無線信号の送信エリアは、侵入検知用親機101の設置位置を含み、かつ侵入検知用子機102a,102b,102c,102d間で互いに異なる。侵入検知用親機101は、侵入検知用子機102a,102b,102c,102dからそれぞれ送信された無線信号を受信し、受信した各無線信号に基づいて、空間特徴量を無線信号ごとに算出し、算出した空間特徴量に基づいて無線信号に対応する送信エリアにおける人間の動作を検知する。
(もっと読む)
探知測距装置および探知測距方法
【課題】複数の送信素子および複数の受信素子を有する探知測距装置の処理時間の短縮と回路の簡略化とを図る。
【解決手段】探知測距装置は、互いに異なるキャリア周波数を有するM個のプローブ信号を生成する信号生成回路と、M個のプローブ信号を送信するM個の送信素子と、ターゲットからのエコー信号を受信するN個の受信素子と、N個の受信素子のそれぞれに対して設けられ、M個のプローブ信号の中の少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、復調エコー信号を周波数領域でフィルタリングしてM個のプローブ信号に対応するM組のデータ信号を生成するN個の復調回路と、N個の復調回路によって生成されるM×N組のデータ信号に基づいてターゲットを探知する信号処理部と、を有する。
(もっと読む)
距離検出システム
【課題】測定側機器からの発呼信号とこれに対応する応答機器からの応答信号とにそれぞれ特徴を持たせることによって、応答機器までの距離の算出を可能とする。
【解決手段】測定側機器1Aは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器から送信されてくる応答信号を受信する測定側受信部12と、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器から受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Aと応答側機器との間の距離を算出する距離算出部15と、応答側機器の応答側特徴量記憶部に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えている。
(もっと読む)
知覚システム
【課題】新規な知覚システムを実現すること。
【解決手段】実施例1の知覚システムは、人や物体に取り付けられた励振器1と、励振器1から離間して設けられた電磁場変動検出器2と、知覚装置3と、を備えている。電磁場変動検出器2は、互いに離間して設けられた2つのアンテナ20A、Bを有し、励振器1からの電磁波をアンテナ20A、Bで受信して、受信した2つの電気信号の位相差を測定する。知覚装置3は、電磁場変動検出器2によって測定した位相差の時間変化を、人の知覚に訴える現象に置き換えて、人に知覚させる。
(もっと読む)
無線測距装置、無線端末及び無線測距システム
【課題】折り返しパルスの受信レベルが高速に大きく変動する環境においても、適切な利得によって折り返しパルスを受信し、正確に測距する無線測距システムを提供する。
【解決手段】リーダ制御部25は、タグ−リーダ間の距離を検出するために、送信電力、受信ゲインおよび自折り返しパルスの送信レベルの組合せを周期的に切り替える。第1の組合せでは、リーダ制御部25は、送信電力、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「小」、「小」、「大」に設定する。この場合、タグAとタグBでは、リーダ5からの送信パルスの受信レベルが第1の閾値より小さいので、折り返し送信しない。タグCでは、送信パルスの受信レベルが第1の閾値より大きいので、折り返し送信する。第2の組合せでは、リーダ制御部25は、送信電力、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「中」、「中」、「中」に設定する。
(もっと読む)
マイクロ波エレメントへの物体の近接を検出するために使用されるセンサアセンブリ
【課題】マイクロ波エレメントへの物体の近接を検出するために使用されるセンサアセンブリを提供する。
【解決手段】少なくとも1つのマイクロ波信号を発生するように構成された信号発生器104と、信号発生器104に接続された結合器106と、結合器106に結合されたマイクロ波エレメント108と、結合器106に接続された処理モジュール112が含まれている。マイクロ波エレメント108は、少なくとも1つのマイクロ波信号の関数として電磁界を発生するように構成されている。マイクロ波エレメント108は、物体102が電磁界と相互作用すると、装荷信号を結合器106へ反射するように構造化されている。処理モジュール112は、基準信号を使用して装荷信号を処理し、マイクロ波エレメント108への物体の近接を表すデータ信号を生成するように構成されている。データ信号はサブ−マイクロ波周波数を画定する。
(もっと読む)
レーダ装置
【課題】部品点数の増加を抑えて、ナイキスト周波数による折り返しで発生した信号成分を検出する。
【解決手段】複数のアンテナの送受信波に基づいてターゲットの検出信号を生成する検出信号生成部と、生成されたターゲットの検出信号に対して周波数解析を行い、ターゲットの信号成分を抽出し、該信号成分に対して所定の処理を実行することで、ターゲットまでの距離、ターゲットとの相対速度、ターゲットの方位のうち少なくとも何れか一つを算出する検出信号処理部と、を備え、検出信号生成部は、ナイキスト周波数よりも高い周波数帯域において各アンテナに対応する検出信号に変化を与えるフィルタ部を有し、検出信号処理部は、フィルタ部によって変化が与えられた各アンテナに対応する検出信号から信号成分を取得することで、該信号成分がナイキスト周波数による折り返しで発生した信号成分か否かを判定する。
(もっと読む)
微細振動特徴量算出装置、微細振動特徴量算出方法及びプログラム
【課題】微細振動の測定環境に関わらず、被測定物に発生している微細振動に関する特徴量を正確に算出すること。
【解決手段】本発明に係る微細振動特徴量算出装置は、微細振動を伴う物体に対して、所定の周波数を有する放射波を放射するとともに、当該放射波の前記物体による反射波を検出し、放射波の周波数と反射波の周波数との差分に相当する周波数を有するビート信号を出力するドップラーセンサから出力された当該ビート信号を取得するビート信号取得部と、取得したビート信号を周波数領域の信号へと変換する周波数変換部と、周波数領域の信号へと変換されたビート信号を利用して、微細振動の振動速度の時間に関する急峻な変化を表すビート信号特徴量を算出するビート信号特徴量算出部と、を備える。
(もっと読む)
方位測定装置
【課題】電磁波を目標物に照射し、目標物によって反射された電磁波を受信して目標物の方向を測定する方向測定装置において、構成を簡素にすること。
【解決手段】発振器10はパルス波である信号を生成し、送信アンテナ11は漏れ波アンテナである。この漏れ波アンテナは周波数によりビーム方向が変化する。パルス波は周波数的に広がりを持っているため、信号の放射方向も周波数により異なることとなる。その結果、目標物によって反射されて受信アンテナ12により受信された信号は、目標物の方位によって異なる周波数スペクトルを有する。受信した信号をBPF14A〜Cにそれぞれ透過させて信号強度を測定することで、目標物が3方向のいずれの方位にあるかを検知することができる。
(もっと読む)
距離算出装置、及び制御方法
【課題】飛翔体が最接近した時の飛翔体までの距離を算出すること。
【解決手段】飛翔体Xに対して送信波を送信した場合に得られる反射波のドップラー信号の周波数の推移値と、飛翔体Xまでの距離に応じて推移する周波数の推定値とに基づいて、飛翔体Xが最接近した時の飛翔体Xまでの距離を算出する距離算出部164を備える。
(もっと読む)
信号測定装置
【課題】突発的に入力される被測定信号の検出確度を高めて、この被測定信号が含まれる周波数帯域に対する高精度な検査をより確実に行う。
【解決手段】測定周波数帯域の被測定信号S1を分配する分配部3と、分配部3からの被測定信号S1aを入力して、測定周波数帯域を連続する3個の周波数帯域に分割した各分割帯域に含まれる各分割帯域内信号S2a〜S2cを並列的に検出する信号検出部4と、指定された分割帯域の周波数帯域幅と同じ周波数帯域幅で第1局発信号S3を掃引し、分配部3からの被測定信号S1bと第1局発信号S3とをミキシングして生成した信号S4を検波して、指定された分割帯域内の分割帯域内信号についての検波出力Vdを生成する受信部5と、信号検出部4で分割帯域内信号S2が検出された分割帯域のうちの1つを指定された分割帯域として受信部5に対して検波出力Vdを生成させる処理部7とを備えている。
(もっと読む)
電波受信装置とその信号処理方法
【課題】 目標の周波数が不確定であっても目標を確実に捕捉することの可能な電波受信装置を省スペース化して提供すること。
【解決手段】 実施形態の電波受信装置は、目標から到来する電波に基づいて目標を一定の視野内に捕捉するために用いられる電波受信装置において、複数の受信アンテナと、アンテナ切換部と、受信部と、信号処理部と、制御部とを具備する。アンテナ切換部は、上記複数の受信アンテナから任意のアンテナを選択する。受信部は、上記選択された受信アンテナで受信された任意の帯域の信号を検波する。信号処理部は、受信部で検波された信号を処理して上記複数のアンテナで受信された信号の諸元を得る。制御部は、上記目標を検出する検出モードにおいて、上記受信アンテナの受信帯域を連続する互いに異なる帯域に個別に設定し、上記目標の方位を探知する方探モードにおいて、上記受信アンテナの受信帯域を上記目標から到来する電波の帯域に合わせこむ。
(もっと読む)
FM−CWレーダ装置、ペアリング方法
【課題】目標物に対するペアリングを短期間で精度良く行うことを可能とするFM−CWレーダ装置、ペアリング方法を提供すること。
【解決手段】電圧制御発振器11の制御電圧VCONTの算出方法を周波数上昇区間と周波数下降区間とで異なるように制御し、送信波と受信波を混合して得られたビート信号の周波数成分を算出し、周波数上昇区間におけるビート信号の周波数成分と、周波数下降区間におけるビート信号の周波数成分とのペアリングを行い、ペアとなった成分同士の信号レベルの差が所定値以下である周波数成分のペアを、目標物(ターゲット)に対応する正しいペアとして特定する。
(もっと読む)
超広帯域パルス・センサ
【課題】外部の干渉波の影響を除去でき、目標物までの距離検出精度の高いUWBパルス・センサの提供。
【解決手段】探知波生成部15は、周波数fmin〜fmaxを間隔Δfで等分した全周波数点集合から使用周波数点集合を含む周波数点を離散周波数点系列に従って並べ、探知波を順次発振する。探知波が目標物で反射された反射波は、受信後、位相検波器10で位相検波され周波数点に対する位相点系列が生成される。欠落補償部11は、各位相点に対応する周波数点の昇順又は降順で並べ替え、欠落した周波数点に対応する位相点を補間し、補間された位相点系列を算出する。逆離散フーリエ変換部12は、補間された位相点系列を逆離散フーリエ変換しレンジ・スペクトルを生成し、レンジ・スペクトルのピークの位相値からアンテナから目標物までの距離を算出する。
(もっと読む)
送受信装置及び同期システム
【課題】2つの送受信装置の間の同期確立と距離を測定する
【解決手段】他の第2送受信装置に対して第1信号を送信し、第2送受信装置において受信した第1信号を折り返して第2信号として返信して、フェズドロックループ(PLL)により同期をとる送受信装置である。基準信号を出力する基準発振器と、送信ベースバンド信号を発生する、位相と周波数が可変の信号発振器と、送信ベースバンド信号により搬送波を変調して得られる第1信号を送信する送信器を有する。第2送受信装置から受信した第2信号を復調して受信ベースバンド信号を得る受信器と、送信ベースバンド信号と基準発振器の出力する基準信号との第1位相差を検出する第1位相比較器と、受信ベースバンド信号と基準発振器の出力する基準信号との第2位相差を検出する第2位相比較器と、第1位相差と第2位相差との絶対値の差を出力する比較器とを有する。比較器の出力が零となるように、信号発振器の位相と周波数をフィードバック制御した。
(もっと読む)
距離測定装置
【課題】計算量が少なく、かつ距離の算出精度を十分に高めることができる距離測定方法を用いた距離測定装置を提供することを目的とする。
【解決手段】受信手段と、測定部21と、記憶部22と、演算部(距離演算部)17と、を備え、演算部17は、記憶部22から取り出した振幅測定値を処理して、隣接チャンネルを含む周辺チャンネルよりも振幅が小さくなる極小値を検出し、隣接チャンネル間で高域側チャンネルの位相から低域側チャンネルの位相を差し引いた隣接チャンネル間の位相差を周波数軸方向に配列してなる位相差曲線において前記振幅極小値が検出されたチャンネル付近の極値が極大値であれば、その時に測定された前記位相差を用いて距離演算を行い、前記極値が極小値であればその時に測定された位相差は距離演算から排除することを特徴とする。
(もっと読む)
車両内の識別対象物を検出する方法
【課題】識別対象物が、自動車の周りの領域の内部に位置するかどうかについての判断を行なうことのできるシステム。
【解決手段】校正信号(S_CAL)をアンテナ装置の方向に送出して制御電力(PR)を決定し、制御電力(PR)に対応する関数信号(S_FONC)をアンテナ装置の方向に送出して、アンテナ装置が所定の磁界を放出するようにし、識別対象物が受信し、かつ放出磁界に対応する磁界(Br)を測定して、公称磁界(B0)と比較し、かつ前記比較の結果によって変わる形で、識別対象物が、アンテナ装置の周りの領域(ZO)の内部に位置するかどうかについての判断を行なう。
(もっと読む)
レーダ装置
【課題】2周波数を同時に受信し2周波数を独立に可変できるレーダ装置。
【解決手段】異なる第1及び第2RF中心周波数を持つ異なるRFパルスに対する第1及び第2RF信号を同時に受信する装置で、第1及び第2RF中心周波数の平均周波数を発生するローカル周波数発生器3の出力に基づき90度位相差を有する2つのローカル信号を生成し出力する90度分配器5の出力と第1及び第2RF信号の各々を同一の2つのRF信号に分配する分配器1の出力とを混合するミクサ7a,7b、ミクサのIF信号をフィルタリングするフィルタ9a,9b、この出力をA/D変換するA/D変換器11a,11b、この出力をリサンプルしてサンプリング間隔を変更するリサンプル回路13a,13bの各々は同一特性であって、この出力を合成する90度ハイブリッド15を有する。
(もっと読む)
1 - 20 / 183
[ Back to top ]