
Fターム[5J070AH45]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フィルタ手段 (829) | デジタルフィルタ (91)
Fターム[5J070AH45]に分類される特許
1 - 20 / 91
レーダ装置
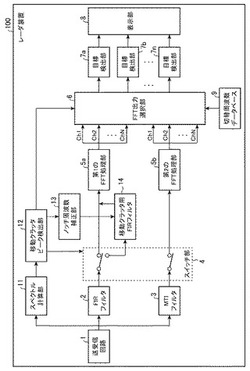
【課題】クラッタ抑圧性能と目標信号保存性能を両立させると同時に、静止クラッタと移動クラッタを抑圧することができるレーダ装置を得る。
【解決手段】受信信号の静止クラッタを抑圧するFIRフィルタ2と、受信信号の静止クラッタを抑圧するMTIフィルタ3と、ノッチ周波数補正部13が調整したフィルタ係数を用いて、FIRフィルタ2の出力信号の移動クラッタを抑圧する移動クラッタ用FIRフィルタ14と、FIRフィルタ2または移動クラッタ用FIRフィルタ14の出力信号に対してコヒーレント積分を行う第1のFFT処理部5aと、MTIフィルタ3の出力信号に対してコヒーレント積分を行う第2のFFT処理部5bと、移動クラッタピーク検出部12の検出結果に基づいて、第1のFFT処理部5aからの出力信号と第2のFFT処理部5bからの出力信号のいずれか一方の出力信号を選択するFFT出力選択部6とを備えた。
(もっと読む)
追尾装置

【課題】高分解能センサ及び低分解能センサによる航跡に対して正確な割り当てを行うことで、真の目標数分の航跡を生成する。
【解決手段】目標を観測して航跡を生成するセンサ1と、センサ1より低分解能であり、目標を観測して航跡を生成するセンサ2と、センサ1,2により生成された航跡を1対1で割り当てる航跡割当処理部3と、割当結果に応じて、センサ1により生成された航跡を、センサ2により生成された対応する航跡に基づいて更新する第1の航跡更新部5と、割当結果に応じて、センサ1により生成された未割当ての航跡を、センサ2により生成された複数の航跡に基づいて更新する第2の航跡更新部6と、センサ1,2の分解能比に基づいて、第1,2の航跡更新部5,6の動作を制御する分解能比判定処理部4と、更新された航跡を統合する航跡更新統合処理部7とを備えた。
(もっと読む)
ドップラーレーダシステム、及び物体検知方法
【課題】受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上する。
【解決手段】本発明に係るドップラーレーダシステム100は、送信アンテナ120と、複数の受信アンテナ121と、目標物体150に含まれる複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部105と、第1間隔を有する第1分割枠を用いて、測定点の第1重心116aを算出する第1重心算出部106aと、第1間隔より狭い第2間隔を有する第2分割枠を用いて、測定点の第2重心116bを算出する第2重心算出部106bと、複数の第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの第2重心116bを目標物体150の位置に決定する重心決定部107とを備える。
(もっと読む)
レーダ装置
【課題】空間に存在している複数の目標の検出性能を高めることができるとともに、測距性能を高めることができるレーダ装置を得ることを目的とする。
【解決手段】パルスドップラ処理の処理結果であるドップラ周波数と、1つの周波数変調帯域幅を用いるRGH処理の処理結果であるビート周波数fb及びPRI内の距離rpriとを用いて、複数の目標候補の組み合わせを決定し、複数の組み合わせの中から、正しい組み合わせを選択し、その組み合わせに係る各目標候補のビート周波数fb及びPRI内の距離rpriを用いて、各目標候補の相対速度v及び相対距離Rを算出する。
(もっと読む)
人体検知装置および自動水栓装置
【課題】消費電力を実質的に低減する水栓装置を提供する。
【解決手段】所定検知領域に送信したマイクロ波の反射波を受信し、前記所定検知領域に送信したマイクロ波と受信した反射波とに基づいてドップラ信号を生成し、ドップラ信号に基づいて前記所定検知領域における人体の存在を検知する水栓装置であって、前記反射波の受信と、前記反射波に基づくドップラ信号の生成と、を所定のサンプリング周期毎に実行しており、前記ドップラ信号が基準値からピーク値となるまでのサンプリング数を計数し、当該サンプリング数に応じた回数だけ、前記ピーク値以降のサンプリングを停止する。
(もっと読む)
レーダ装置、誘導装置及び目標追随方法
【課題】検出した移動速度に速度誤差が含まれている場合であっても、合成帯域レーダで高分解して検出した測定値をMTTで正確にトラッキングすることが可能なレーダ装置を提供する。
【解決手段】レーダ装置は、合成帯域レーダ、速度トラッキング部、誤差算出部、誤差変換部、レンジ修正部及び複数部位トラッキング部を具備する。合成帯域レーダは、目標で反射された反射波を受信し、受信した反射波に基づいて、目標の速度測定値を測定し、目標内の複数の部位毎のレンジ情報を検出する。速度トラッキング部は、過去の速度測定値に基づいて速度推定値を算出する。誤差算出部は、速度推定値と速度測定値との差から速度誤差を算出する。誤差変換部は、速度誤差をレンジ誤差に変換する。レンジ修正部は、検出されたレンジ情報をレンジ誤差に基づいて修正する。複数部位トラッキング部は、修正したレンジ情報に基づいて、目標内の複数の部位毎にトラッキングを行う。
(もっと読む)
目標追跡システムとそのプログラム及び方法、角度追跡装置とそのプログラム及び方法、目標追跡装置とそのプログラム及び方法
【課題】装置規模の縮小、処理時間の短縮を実現する。
【解決手段】目標追跡装置13において、角度追跡装置12−iから2次元観測値と2次元航跡の対が入力されると、予測処理部131により、維持している3次元航跡から2次元予測値を算出し、相関処理部132により、算出された2次元予測値と角度追跡装置12−iからの2次元観測値の相関の有無を判定し、相関がないと判定された場合、2次元航跡抽出部133により、相関がないと判定された2次元観測値の対となる2次元航跡を抽出し、3次元航跡生成部134により、2次元航跡抽出部133で抽出した異なる角度追跡装置からの2次元航跡に基づいて、3次元航跡を生成する。一方、相関があると判定された場合、平滑処理部135により、相関があると判定された2次元観測値を用いて2次元予測値に対応する3次元航跡を更新する。
(もっと読む)
受信装置および受信方法
【課題】マルチパス環境においても良好な受信性能が得られる受信装置を得ること。
【解決手段】モードS信号を受信する受信装置であって、受信信号を直交検波する直交検波部2と、直交検波後の受信信号に対して周波数オフセットを補償する周波数補償部5と、周波数オフセットの補償後の受信信号に基づいて先行波の到来時刻である先行波到来時刻を推定する先行波検出部3と、周波数オフセットの補償後の受信信号のプリアンブル部と先行波到来時刻とに基づいて、伝搬路の推定を行う伝搬路推定部6と、伝搬路推定部6による推定結果に基づいて、周波数オフセットの補償後の受信信号に対してマルチパスによる歪みを補償する等化処理を行い、等化処理結果に基づいてビット判定を行う等化部7と、を備える。
(もっと読む)
距離,速度測定装置
【課題】測定周期毎に、送信波を反射した物標との距離(ひいては速度)を可能な限り精度良く求めることができる距離,速度測定装置を提供する。
【解決手段】受光チャンネルCHi(i=1〜4)のそれぞれについて一発測距回路321と積分測距回路322とを並行して動作させ、受光チャンネルCHiから得られる受信信号Riが上閾値より大となる一発測距領域では一発測距回路321による第1測距値D1を、受信信号Riが下閾値以下となる積分測距領域では積分測距回路322による第2測距値D2を、受信信号Riが下閾値より大且つ上閾値以下となる中間領域では、両測距値D1,D2の加重平均値を距離データDとして生成する。
(もっと読む)
フェイズドアレーアンテナのブランチ間補正装置及びフェイズドアレーアンテナのブランチ間補正方法
【課題】回路規模を増大することなく、フェイズドアレーアンテナを構成する各アンテナに対応して設けられた各ブランチにおける高周波信号間の位相誤差を高精度に補正する。
【解決手段】フェイズドアレーアンテナのブランチ間補正装置は、変調部と、遅延部と、ミキサ部と、アンテナとを含むブランチを複数有し、更に、隣接する各々のブランチからの2つの高周波信号を基に周波数変換する周波数変換部と、周波数変換部からの出力信号を基にDC成分を抽出するフィルタ部と、フィルタ部により抽出されたDC成分を基に、ブランチの遅延部における所定の位相遅延量を判定する遅延制御部と、を備える。遅延制御部は、隣接する各々のブランチのうちいずれかの遅延部に、いずれかのブランチにおいて変調された送信信号の位相を、判定された所定の遅延量ほど遅延させる。
(もっと読む)
ターゲット識別システム
【課題】簡易な構成でありながら正確にターゲットである例えば人の移動軌跡を追跡するなどのターゲット識別をすることができるターゲット識別システムを提供すること。
【解決手段】送信アンテナTAの各素子アンテナから、互いに直交する信号を送信し、ターゲットで反射して帰ってくる信号を受信アンテナRAで受信して、整合フィルタによって、互いに直交する信号を分離することによって空間バーチャルアレーSVAを構成し、異なる時間に得られる信号について、ターゲットの移動に伴う位相ズレを補償することによって仮想的に位置がズレている素子アンテナの信号として得ることによって時間バーチャルアレーTVAを構成する。これによって、実質的に素子アンテナの数を増やし、開口長を拡大することができる。
(もっと読む)
広帯域ビーム形成装置、広帯域ビームステアリング装置及び対応する方法
【課題】アクティブイメージング装置において、ビーム形成装置、方法及びビームステアリング装置、方法に関する。
【解決手段】環境5にむけて無線を送信する1つの送信アンテナ15を含む広帯域送信ユニット10と、送信信号の周波数は、広帯域周波数レンジ内で時間と共に変化することと、環境5から無線を受信し、受信される無線から受信信号を生成する2つの受信アンテナ25及び1つの受信エレメント21,22を含む受信ユニット20と、ビーム形成重みを使用することにより、ビーム形成を実行して、ビーム形成された出力信号を受信信号から取得するビーム形成ユニット30と、受信信号の後続サンプルのうちそれぞれ異なる周波数における受信信号をビーム形成のために周波数依存の重みが使用されることと、周波数依存の重みは、受信ビームの所定の形状を生み出すように適合される。
(もっと読む)
目標追尾装置
【課題】PRI内距離を目標の運動諸元の推定処理に利用できるようにして、目標の運動諸元の推定精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】PRI内距離ゲート内外判定部14によりゲート内にあると判定されたPRI内距離毎に推定値の仮説を生成して、その仮説の信頼度を算出し、1以上の仮説の中で、信頼度が高い仮説を採択する推定値仮説生成部15や、推定値仮説生成部15により採択された仮説に係るPRI内距離を用いて、現時点での運動諸元の推定値を更新するPRI内距離フィルタ処理部16などを備える。
(もっと読む)
レーダ装置
【課題】 ステップ周波数をパルス信号帯域よりも大きくした場合においても、曖昧なく距離計測可能なレーダ装置を提供することを目的としている。
【解決手段】 ステップ周波数ずつ周波数が異なる受信パルス信号に基づく合成帯域処理により距離計測を行うレーダ装置であって、前記合成帯域処理が行われる前記受信パルス信号のスペクトルの帯域外の成分を強調する帯域外成分強調フィルタ処理を行うフィルタ処理器と、を備えたものである。
(もっと読む)
移動物体検出装置
【課題】複数の移動体を単一の移動物体であると誤認識してしまう状況の発生を抑制
【解決手段】移動物体検出装置1は、レーダ波を前方に向けて送信し、送信したレーダ波の反射波を観測した結果に基づいて、レーダ波を反射した反射点の位置である反射点位置を連続して検出する。検出された2つの反射点位置のうち、移動物体検出装置1から遠い方の反射点位置である第1反射点位置を移動物体における前端部の位置であるとし、移動物体検出装置1から近い方の反射点位置である第2反射点位置を移動物体における後端部の位置であるとして、第1反射点位置と第2反射点位置との間の距離である反射点間距離の時間経過による変動量が、反射点間距離の変動量が小さいことを示す予め設定された変動判定条件を満たす場合に、第1反射点位置および第2反射点位置がそれぞれ移動物体の前端部および後端部の位置であると判断する。
(もっと読む)
周波数検出方法及び装置
【課題】所望の周波数分解能力を維持しながらフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、複素乗算回数を減らす。
【解決手段】周波数fcを含む所定の周波数帯域幅Δfp内で受信信号の周波数解析を行う装置は、受信信号の周波数変換を行う変調器3と、変調器3の出力に接続したアナログフィルタ4と、アナログフィルタ4の出力をオーバーサンプリングでデジタル信号に変換するA/D変換器6と、A/D変換器6の出力から周波数帯域幅Δfpに相当する成分を抽出するデジタルBPF(バンドパスフィルタ)7と、周波数ゼロからΔfpに相当する帯域幅内に配置されるように、デジタルBPF7から出力される信号をダウンサンプリングするダウンサンプリング部8と、ダウンサンプリング部8の出力に対して高速フーリエ変換を行うFFT処理部9とを備える。
(もっと読む)
指示支援装置
【課題】本発明は、目標から到来した反射波で示される画像の分解能の向上を図る高分解能処理の対象を設定する指示支援装置に関し、構成が大幅に複雑化することなく高分解能処理の処理量を削減できることを目的とする。
【解決手段】到来した反射波で示される画像の内、前記画像に含まれる見かけ上の目標が位置する領域もしくは部位を抽出する抽出手段と、前記領域または前記部位を分解能の向上を図る高分解能処理の対象とする制御手段とを備える。
(もっと読む)
レーダ装置及び受信データ処理方法
【課題】 ドップラフィルタ処理後のデータをスキャン間で正確に積分することが可能なレーダ装置及びこのレーダ装置で用いられる受信データ処理方法を提供する。
【解決手段】 レーダ装置は、無線部、パルス圧縮部、ドップラフィルタ処理部及び積分処理部を具備する。無線部は、外部からパルス信号を受信し、パルス信号を、パルス圧縮係数を生成するサンプリング周波数よりも大きいサンプリング周波数でオーバーサンプリングしてデジタル変換する。パルス圧縮部は、デジタル変換でのオーバーサンプリングによりサンプル数が増加したデジタルデータに対して、パルス圧縮係数を用いてパルス圧縮処理を施し、パルス信号毎のレンジセル信号を生成する。ドップラフィルタ処理部は、レンジセル信号に対してドップラフィルタ処理を施すことで、レンジセル毎の周波数バンク信号を生成する。積分処理部は、周波数バンク信号をスキャン間でレンジセル毎に積分する。
(もっと読む)
ウェイト算出方法、ウェイト算出装置、アダプティブアレーアンテナ、及びレーダ装置
【課題】 ウェイト制御による時空間適応信号処理方式において、不要波方向を零にするためのウェイト算出に際し、目標のドップラー周波数に対して良好なSINR特性を得る。
【解決手段】 ウェイト算出回路271において、不要波のみから形成されると想定されるセルのデータから共分散行列を演算して適応ウェイトを求め、最終的に、ビーム合成回路272において、適応ウェイトによりアンテナ受信信号にウェイト制御を施して出力データとする。上記ウェイト算出回路271において、受信Mパルスに対してドップラーフィルタ後のmバンク選択するPost-Doppler処理を適用して共分散行列を算出し、この共分散行列に対し、目標ドップラー周波数、または、演算時間と信号処理利得の関係から、該当する複数のバンク部分を抽出して複数のウェイトを算出し、これによって目標のドップラー周波数に対して良好なSINR特性を得る。
(もっと読む)
追尾装置
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
(もっと読む)
1 - 20 / 91
[ Back to top ]