
Fターム[5J070AJ02]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | 座標変換 (57)
Fターム[5J070AJ02]の下位に属するFターム
r、θ←→X、Y (23)
Fターム[5J070AJ02]に分類される特許
1 - 20 / 34
物体検出装置及び物体検出方法
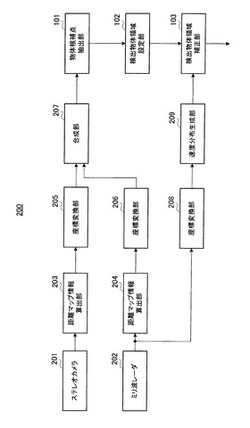
【課題】誤結合検出を防止することにより、物体検出精度を向上させることができる、物体検出装置及び物体検出方法を提供すること。
【解決手段】物体検出装置200において、検出物体領域補正部103が、基準画像平面内の座標群と、レーダによって検出された、各座標における検出移動速度とが対応付けられた移動速度マップ情報に基づいて、検出物体領域設定部102によって設定された検出物体領域を補正する。こうすることで、検出物体領域が誤結合の結果として得られたものであっても、その検出物体領域を移動速度マップ情報を用いて修正することができる。この結果、物体検出精度を向上させることができる。
(もっと読む)
干渉除去装置、レーダ装置、及び干渉除去方法

【課題】レーダ映像の分解能を損なわずに、干渉除去する際のメモリ使用量を削減する。
【解決手段】干渉除去装置は、スイープデータ値の数値範囲を区分した複数の級のうち、入力されるスイープデータ値に対応する級を選択する級選択部と、入力されるスイープデータ値と方位方向に隣接するスイープデータ値に対して算出されたフィルタ出力値であって複数の級のいずれかの級により方位方向の相関を示すフィルタ出力値と、級選択部が選択した級とに基づいて、方位方向の相関を示すフィルタ出力値を算出するフィルタ処理部と、フィルタ処理部が算出した入力されるスイープデータ値に対するフィルタ出力値と、予め定められたしきい値とに基づいて入力されるスイープデータ値が干渉であるか否かを判定し、干渉であると判定された場合、予め定められた抑圧値を出力し、干渉でないと判定された場合、入力されるスイープデータ値を出力する干渉抑圧部とを備える。
(もっと読む)
測位情報形成装置、検出装置、及び測位情報形成方法
【課題】物体検出精度を向上する測位情報形成装置、検出装置、及び測位情報形成方法を提供すること。
【解決手段】測位情報形成装置100において、合成部103が、カメラ距離マップ情報とレーダ距離マップ情報とを合成し、「合成マップ情報」を生成する。この合成マップ情報は、検出装置200において物体検出処理に用いられる。こうすることで、カメラ距離マップ情報とレーダ距離マップ情報とを合成した情報に基づいて物体検出することができるので、物体検出精度を向上することができる。すなわち、カメラ距離マップ情報とレーダ距離マップ情報とを合成することにより、地面又は壁面等からの反射による不要なノイズの除去が期待できるので、物体検出閾値を低く設定することができる。このため、従来では、検出不可能と判断された物体であっても、検出することができる。
(もっと読む)
画像変化選別装置
【課題】地表面に生じた物理的な変化を対象に、ノイズが残った状態でも変化領域の特徴量抽出および選別対象変化候補領域の限定を行い、選別対象変化であるか否かを判定可能な画像変化選別装置を得る。
【解決手段】変化抽出結果画像のノイズ除去部2と、特徴量抽出部3と、画像をセグメント分割するセグメント生成部4と、セグメント位置調整部5と、セグメントの交差特徴算出部6と、交差特徴に基づくセグメント選択部7と、セグメント変換部8と、交差特徴と変換後セグメントとに基づくマッチング用のテンプレート選択部9と、選択されたテンプレートと変換後セグメントとのマッチング部10と、マッチング結果の適合テンプレートの空間的連続性評価結果に基づき適合テンプレートを選択するテンプレート評価部11と、選択後適合テンプレートTsを空間的に配置した変化選別結果を出力する変化選別部12と、を備えている。
(もっと読む)
レーダ情報表示装置
【課題】投影方法を切り替えてもレーダ情報や地図情報が表示されるまでの遅延を少なくすることができるようにする。
【解決手段】レーダ情報記憶バッファ210および地図情報記憶バッファ220は、それぞれが2つの記憶バッファ211(221),212(222)と、当該記憶バッファの一方を記憶情報の読み出し状態にした場合に他方を更新情報の書き込み状態となるように切り替えるバッファ切り替え手段213(223)とを有しており、座標変換手段240と画像生成手段230による表示画像生成処理は、所定の周期で、かつ当該周期内の一定の期間に割り当てて繰り返して行い、レーダ情報記憶バッファ210および地図情報記憶バッファ220の更新情報の書き込み処理は、所定の周期内の残りの期間に割り当てて任意の時期に行う。
(もっと読む)
物標探知装置、物標探知方法、および物標探知プログラム
【課題】より正確なスキャン相関処理を行える物標探知装置を実現する。
【解決手段】物標探知装置100の相関処理部6は、スイープメモリ2に記憶された極座標系のエコーデータと、読出用メモリ70Bにて極座標系で記憶された前回スキャンのスキャン相関処理後記憶データとを、スキャン相関処理する。この際、アドレス決定部5は、アンテナ回転情報取得部3からのアンテナ回転情報と位置検出部4からの位置情報および船首方位とを用いて、スイープメモリ2からのエコーデータと、読出用メモリ70Bからのスキャン相関処理後記憶データとの座標系を一致させるように、読出アドレスを設定して、読出用メモリ70Bへ与える。書込用メモリ70Aは、アドレス決定部5により今回スキャンの基準タイミングの座標系で設定された書込アドレスに準じて、相関処理部6からのスキャン相関処理後データを記憶する。
(もっと読む)
障害物検出装置
【課題】車両周辺の障害物の位置・形状及びスペースを広範囲かつ正確に検出すること。
【解決手段】アレイ状に配置された素子から送信波を送信し、障害物での反射波を各素子で受信する。その受信信号を受信した時間から障害物の距離を算出し、各素子の受信信号の位相差から障害物の方向を算出する。また、広範囲で障害物を検出するために、各素子に入力する送信信号の位相差を適宜変えて、送信波の合成指向性を制御するとともに、各素子の受信信号に乗算する係数を適宜変えて、受信波の合成指向性を制御する。特に、隣接素子間に位相差を同相、逆相交互に設定することで、指向性を狭角、広角と交互に切り替え、広範囲の障害物の位置検出を可能とする。さらに、移動しながら検出した位置情報から、車両走行経路周辺の障害物の位置・形状及びスペースの認識を可能とする。
(もっと読む)
レーダ装置
【課題】検出した各物標のエコーの種類を正確に識別するレーダ装置を提供する。
【解決手段】挙動データ発生部11は、エコーデータが物標検出閾値以上であるかを判定し、判定結果に基づく挙動判定用データを生成するとともに、挙動判定用データを過去数スキャン分並べた挙動データPnを生成する。連続性検出部9は、エコーデータのスイープの方位方向およびスイープの回転方向である距離方向に対する連続性を検出し、連続性データAnを生成する。エコー種類判定部6は、今回のエコーデータが固定物標のエコーか移動物標のエコーか不要波のエコーかを、挙動データPnおよび連続性データAnを組み合わせて判断する。さらには、海面反射領域設定部14からの海面反射領域データBnを用いることで、海面反射のエコーであるかも判断する。
(もっと読む)
状況表示装置
【課題】多数の目標の状況を正確かつ迅速に把握することを可能とする。
【解決手段】第1の座標変換手段により、観測したセンサ中心空間の座標を地球中心空間の座標に変換し地球中心座標記憶手段に記憶し、目標の位置を管理する目標リストを用いて、航跡管理手段により、異なるセンサにより得られた複数の観測値および異なる時刻に得られた複数の観測値を地球中心空間の座標と比較して同一の目標に対応するかを判定し、判定結果に基づき目標の位置情報を更新し、第2の座標変換手段により、記憶された地球中心空間の座標をスクリーン座標に変換してスクリーン座標記憶手段に記憶し、画像生成手段により、目標のリストに基づいてスクリーン座標記憶手段から所定の目標座標情報を読み出し、当該読み出した座標の位置に目標を表すシンボルの画像を生成する。
(もっと読む)
電波測角アンテナ、これを備えた電波測角装置、及び飛しょう体
【課題】従来のレドーム内に設置される電波測角アンテナでは、レドームの影響を受けるため正確な入射角が計測できないという問題がある。
【解決手段】そのために、本発明の電波測角アンテナは、同一の面に配設された複数の計測アンテナと、前記計測アンテナに対して交差する方向に配設された複数の補助アンテナとを備えたことを特徴とする。これにより、補助アンテナにより入射方向を算出し、その情報を用いて、計測アンテナの誤測角を低減するものである。
(もっと読む)
鉄筋コンクリート体の健全性の非破壊評価方法、及びその装置
【課題】コンクリート体のひび割れや脆弱化等により損傷を受けたコンクリート体の健全性非破壊で効果的に評価する方法を提供する。
【解決手段】上記課題は、鉄筋コンクリート体の健全性を非破壊で評価するにあたり、電磁波レーダーkにより鉄筋コンクリート体g内の鉄筋hの探査を、所定の探査間隔で、コンクリート体gの評価対象領域の全体にわたり行うことによって、少なくとも鉄筋hの深さ位置を取得し、取得した深さ位置に乱れがある探査箇所範囲をコンクリートの不健全箇所として評価する、ことにより解決される。
(もっと読む)
位置検知システム及びそれに用いる位置検知用シート体
【課題】本発明は、本発明は、多数の無線IDタグの精度よく短時間で配列できるとともにこれらの無線IDタグのマッピング作業を効率よく行うことが可能な位置検知システム及びそれに用いる位置検知用シート体を提供することを目的とするものである。
【解決手段】位置検知システムは、矩形状の位置検知用シート体1、位置検知用シート体1にマトリクス状に規則的に配列された多数の無線IDタグ2、検知対象である移動体に取り付けられて無線IDタグ2の一部と交信してIDデータを取得するIDリーダ3、IDリーダ3から発信されるIDデータを中継器4を介して取得し移動体の位置を検知する情報処理装置5を備えている。位置検知用シート体1には、無線IDタグ2に対応して等間隔で位置決め用マークが表示されており、位置決め用マークを基準に複数の位置検知用シート体を敷設することでマッピング処理を簡単に行うことができる。
(もっと読む)
追尾装置
【課題】角度バイアス及び距離バイアス推定精度の高精度化と、バイアス推定の演算時間の高速化を図ることができる追尾装置を得る。
【解決手段】センサ群10、観測値が同一目標から得られた観測値であるかを判定し、同一目標からの観測値の集合を蓄積する観測値データベース30、データベースから同一目標からの観測値を抽出する観測値出力制御処理部40、推定すべき全バイアス成分を、複数組割り当てるバイアス成分組割当処理部50、割り当てられたバイアス成分組毎に設けられた、バイアス成分組初期値設定処理部、バイアス成分組推定処理部及びバイアス成分組収束判定部、バイアス成分組毎のバイアスベクトル推定値とその誤差共分散行列を時系列に蓄積するバイアスデータベース90を備える。
(もっと読む)
レーダ装置
【課題】目標が複数存在し、目標の距離と角度のペアが不明な状況下でも、誤ったペアによる偽目標を排除し、正しいペアリング結果を出力可能なレーダ装置を得る。
【解決手段】距離・角度観測値を生成する距離・角度観測値検出部1と、複数の仮説を生成する仮設生成部4と、初期の距離・角度観測値を生成する初期状態量設定部5と、予測値と観測値との相関処理結果に基づいて、相関のとれた距離・角度観測値を選抜する相関処理部7と、観測値に基づいて予測値を算出する追尾フィルタ部8と、仮説の対数尤度を算出し、全サンプルの仮説の対数尤度の和およびサンプル数を算出する対数尤度算出部9と、サンプル数が所定の閾値以上である場合に仮説毎の対数尤度の和を出力するサンプル数判定部11と、信頼度が最大となる仮説に含まれる距離と角度のペアをペアリング結果として出力する最大信頼度仮説判定部12とを備える。
(もっと読む)
物体検出装置
【課題】 レーダを用いた物体検出において物体を正確に検出する物体検出装置を提供する。
【解決手段】 本発明に係る物体検出装置1の物体検出部4は、複数の検出点データから一つの物体に対応する複数の検出点データをグルーピングするグルーピング手段41と、グルーピング手段によりグルーピングされた検出点データに対応する画像部分から、検出対象物体の所定の一部分を探索して検出する部分探索手段42と、レーダ検出部から、部分探索手段により検出された一部分の両端へ延びる2本の直線を算出する直線算出手段43と、グルーピング手段によりグルーピングされた検出点データのうち、直線算出手段により算出された2本の直線よりも内側の検出点データを、検出対象物体の一部分に対応する検出点データとして抽出する検出点抽出手段44とを有する。
(もっと読む)
レーダ装置および類似装置、画像表示方法
【課題】
探知レンジを変えた場合に、それまでに蓄積していた探知画像を変更後のレンジの縮尺に変換することによって、それまでに蓄積していた探知画像を消すことなく引き続いて新しい縮尺での表示が可能となるレーダ装置および類似装置を提供する。
【解決手段】
レンジ変更時の探知画像描画方法であって、探知画像をメモリに記憶し表示部に出力する工程と、画面上に表示する付加情報を記憶し前記付加情報を前記表示部に出力する工程と、記憶した前記探知画像からコンピュータの画像操作機能を用いてレンジ変更後の縮尺に適合するレンジ変更後画像を算出して記憶する工程と、記憶した前記付加情報から前記レンジ変更後の縮尺に適合するレンジ変更後付加情報を算出して記憶する工程とを備えることを特徴とする。
(もっと読む)
スキャンコンバータ、レーダ装置及びスキャンコンバート方法
【課題】拡大表示を行う際にも、レーダエコー等のデータを欠落なく高速に再現する。
【解決手段】始点終点メモリ2に各方位それぞれに対応する探知距離に相当する線分の両端座標を予め記憶しておく。表示領域設定部7は、CPU3の指示により表示装置の画面表示領域を指定する情報をもとに座標計算部4に表示領域の設定を行う。レーダビデオとして各方位それぞれの測定結果(距離及び信号強度)が入力ビデオバッファ1に入力される毎に、座標計算部4は各方位に対応する線分の始点及び終点座標を始点終点メモリ2から読み出す。座標計算部4は、読み出された始点から終点に向かって表示領域設定部7により設定される表示領域を越えるまで測定結果が示す距離を計算された線分上の座標点に換算して、それぞれの距離に対応する信号強度を換算された座標点のフレームバッファ6に描画することでラスタビデオに変換する。
(もっと読む)
航法援助装置
【課題】部分拡大表示部の表示内容からも捕捉・追尾中の物標に関する情報を読み取れるようにし、また部分拡大表示部上での操作によっても捕捉・追尾対象とする物標またはターゲットマークを指定可能とする。
【解決手段】選択された物標またはターゲットについてターゲットマークMt1を通常倍率表示部Dnに表示するとともにターゲットマークMt2を部分拡大表示部Deに表示する。また、部分拡大表示部Deに複数の物標やターゲットマークが表示されている際、その部分拡大表示部De内で所望の物標またはターゲットマークを選択することによって選択物標を切り替える。
(もっと読む)
マルチレイヤ画像処理装置及びレーダ装置
【課題】レイヤ毎にメモリバスを用意したり、また一時保存用のメモリを用意したりすることなく、これにより基板製造コストや部品コストの増加を防ぎ、マルチレイヤ画像のメモリアクセス処理を簡略化し得るマルチレイヤ画像処理装置を提供する。
【解決手段】VRAM160に対する複数のレイヤ画像データの書き込み実行に先立ち、メモリコントローラ150にてVRAM160のアドレスラインの一部をデータマスクラインにして、アドレス変換処理を実行することで、CPU120から見たVRAM160のメモリマップを、画像処理部170から見たVRAM160のメモリマップに変換するようにして、CPU120及び画像処理部170の両方から見てメモリ空間が連続になるようにしている。
(もっと読む)
追尾装置
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、座標系制御部6は、観測値用座標変換部に入力される観測値に応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する。
(もっと読む)
1 - 20 / 34
[ Back to top ]