
Fターム[5J070AJ05]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | 信号の除去又は付加 (166) | 不要映像の除去 (84)
Fターム[5J070AJ05]に分類される特許
41 - 60 / 84
パルスレーダ、車載レーダおよび着陸アシストレーダ
【課題】狭帯域で高い近距離分解能を有するレーダを実現する。
【解決手段】パルス信号がターゲットから反射されて受信されるまでの時間差から距離を算出する原理に基づくパルスレーダであって、送信回路からのフィードバック線に応答波形に干渉した送信波形を受信波形から除去するために適応フィルタ、および、ターゲットからの応答波の到着および終了により生じる位相差の変化を取り出すための位相変化検出フィルタを有する。応答波が到着する前に送信パルスを完了する必要がなくなるため、近距離分解能を向上させるためにパルス幅を短くする必要がなくなる。
(もっと読む)
レーダ装置

【課題】電磁波の送信を停止することなく、全てのビーム方向において送信信号と受信信号の差分により得られる周波数解析結果から干渉信号を検知するレーダ装置を提供する。
【解決手段】車両に搭載され、目標物体を検出するためのレーダ装置であって、電磁波を送信信号として送信する送信手段と、目標物体により反射された反射信号を受信信号として受信する受信手段と、送信信号と受信信号により得られるビート信号から、車両と目標物体間の距離および相対速度を測定する信号処理手段と、信号処理手段での周波数解析により得られる周波数を目標物体の距離および相対速度の測定に使用する周波数範囲と、目標物体の距離および相対速度の測定には使用しない周波数範囲に分け、目標物体間の距離および相対速度の測定には使用しない周波数範囲における信号強度に基づいて、他のレーダ装置や通信機器からの干渉信号を検知する干渉検知手段とを備えたものである。
(もっと読む)
非破壊探査装置及びその方法並びにプログラム
【課題】浅い位置に埋設された埋設物の位置及び形状の検出を従来例に比較して高い精度で行え、従来には行えなかった埋設物の材質の推定を行う非破壊探査装置を提供する。
【解決手段】本発明の非破壊探査装置は、送信波を発信し、反射波を受信するマイクロ波レーダ部と、反射波形から送信波形を減算して差分波形を求める差分計算部と、差分波形及び送信波形の相互相関のヒルベルト変換を行い、複素反射係数の絶対値のモデル適応度関数を得る相互相関ヒルベルト変換部と、モデル適応度関数の時間差の最大値及び最大値の時間差を保持し、所定の時間差幅の境界モデル適応度関数に変換する境界モデル適応度演算部と、測定点毎の反射波の境界モデル適応度関数を考慮点の信頼度とし、反射波の境界モデル適応度関数のヒストグラムにより逆投影画像を生成する逆投影像生成部と、逆投影画像にてヒストグラムの極大値を与える送信波形の位相を求める位相検出部とを有する。
(もっと読む)
レーダ装置および類似装置
【課題】物標とレーダ干渉やホワイトノイズ等の不要波とを識別して、異なる表示形態で表示するレーダ装置を実現する。
【解決手段】減算フラグ発生部6は、対象とするエコーデータの時間的継続性と平面的連続性とを判定する。時間的継続性は、同じ位置にどれだけ有意なエコーデータが存在し続けたかを示す量であり、過去所定スイープ回転回数分のエコーデータから得られる。平面的連続性は、対象とするエコーデータの周りにどれだけ有意なエコーデータが存在するかを示す量であり、対象エコーデータを中心に距離方向および方位方向に所定量ずつのエコーデータを平面的に取得することで得られる。減算フラグ発生部6は、時間的継続性と平面的連続性のいずれかがあると検出すると減算フラグ「1」を添付する。減算処理部9は、減算フラグが「1」ならばデータレベルの減衰量を低くし、「0」ならば速くする。
(もっと読む)
電子支援計測システムにおける方法、当該方法の使用および装置
本発明は電子計測システム/方向探知装置(ESM1)によって検出される複数の見かけの放射源により放射される信号を処理する方法及び装置に関するものである。前記装置は、見かけの放射源の各々の放射源特徴パラメータの分散に基づいて、前記見かけの放射源の中の真の放射源(21;31;41)および少なくとも1つの偽の放射源を識別するのに適している。偽のおよび真の放射源が識別されると、この情報は偽の放射源による混乱の抑制するためおよび/または1台のESM/DF装置のみによる観測値を使用して真の放射源の位置を決定するために用いられ得る。 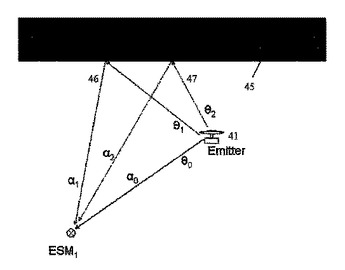 (もっと読む)
(もっと読む)
レーダ装置
【課題】距離やドップラー速度に折返しが発生しても、気象クラッタを十分に抑圧して、正確に目標を検出することができるようにする。
【解決手段】ドップラー速度算出部11により算出されたドップラー速度の中で不連続に変化する点があれば、不連続に変化する点でドップラー速度の折返し補正を実施する速度折返し補正処理部12と、ドップラー速度を空間方向に平滑化するドップラー速度空間平滑処理部14とを設け、フィルタ設定部15が平滑化されたドップラー速度の信号成分を抑圧する帯域制限フィルタを設定し、クラッタ抑圧フィルタ処理部16が当該帯域制限フィルタを用いて、受信信号に含まれている不要信号成分を抑圧する。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とメインローブクラッタのドップラ周波数が重なる領域では、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外に出てくる待ち受け処理をするが、待ち受け処理中は、目標又は誘導装置を搭載した飛しょう体が機動をしてビーム領域外とならない限り目標信号を検出できない。
【解決手段】 誘導装置のアンテナパターン及びクラッタ実測値を使用してメインローブクラッタ電力を算出し、別途算出した目標信号の電力と比較して、真に目標が検出困難なメインローブクラッタの角度範囲を算出する。これにより目標接近による目標信号電力の上昇及び実際のクラッタ状況に応じてメインローブクラッタ周波数範囲を狭くするものとした。
(もっと読む)
SSRモードS信号受信装置
【課題】SSRモード応答信号の受信信号が地面等の反射波と合成されて受信されても、反射波を除去して直接波を適切に検出し、データ解読できるようにする。
【解決手段】微分器5が、A/D変換された受信電力合成パルス信号を微分し、相関演算器6が受信電力合成パルス信号を形成した各パルスの前縁及び後縁における振幅及び時間の相関レベルを演算して出力し、反射レベル検索器82がその相関レベルに基づき、反射波を除去し合成波を再合成するための演算パラメータを生成して、逆演算器81に供給する。
従って、たとえマルチパスにより受信信号の波形が変化したとしても、振幅及び時間の相関レベルに基づく逆演算によって、反射波の干渉除去ないしは再合成を図り、SSRモードS応答パルス信号を適正に取り出すことができるので、監視すべきターゲット(航空機)の検出率を向上させることができる。
(もっと読む)
車載レーダ装置
【課題】精度良く他車の検出を行う「車載レーダ装置」を提供する。
【解決手段】画像監視部2の車種識別部22は、カメラ21で撮影した画像より、追尾中の他車の車両のタイプを識別する。他車識別部3のフィルタ特性制御部33は、識別された車両のタイプに応じたフィルタ特性をフィルタ31に設定する。フィルタ31は、設定されたフィルタ特性に従って、レーダ測位部1で計測された計測値をフィルタリングして、追尾中の他車のものとして許容できる計測値のみを抽出し、物標追尾部32は抽出された計測値を用いて他車の追尾を行う。
(もっと読む)
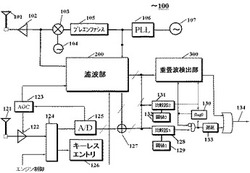
パルスレーダ式障害物検知装置
【課題】漏れ電波、及びパルス制御部の発信タイミング時間の揺らぎがある環境においても、対象物の距離を測定できるパルスレーダ式障害物検知装置を提供する。
【解決手段】パルスレーダ式障害物検知装置1にパルス状の電波を送信する送信部2と、この送信部2を制御するパルス制御部3と、反射波を受信する受信部4と、出力信号を記憶する記憶装置5と、相関度を算出して演算した相関度が最も高い時間遅延情報を出力する相関演算部8と、時間遅延を加えて比較器6に出力する遅延処理部9と、出力信号と記憶装置5の信号とを差分処理する比較器6と、対象物までの距離を算出する距離測定部7と、を設けた。
(もっと読む)
レーダー装置
【課題】移動体に搭載され、送信波を送信し、反射波を受信して、物体を検出する車載レーダー装置に関し、他のレーダー装置の送信波との干渉を防止する。
【解決手段】共通の時刻に関する無線信号を受信する受信部30を設け、制御部20が、時分割で割り付けられた、レーダーセンサ10と、レーダーセンサ10以外の前記電磁波を送信する他のレーダーセンサ12,14,16との送信期間の内、受信した時刻に関する無線信号に応じて、割り当てられた送信期間に、レーダーセンサから前記電磁波を送信する。このため、移動体搭載レーダーであっても、時分割制御で、電波干渉を防止でき、正確なレーダー検知が可能となる。
(もっと読む)
地中レーダ画像処理法
【課題】 管路等の人工物を地中レーダなどにより探査した場合の画像を処理して測定現場で目的の人工物を容易に判定できる効率的な処理法を提供する。
【解決手段】 各測定位置における受信信号をデコンボリューション等により処理して反射信号の遅延時間を推定し、推定された遅延時間と測定位置の差が所定の範囲内にあるものを同じグループに帰属させることにより推定遅延時間をグループ化し、グループごとに同一グループの画素の中で最も遅延時間が短い位置の近傍に反射点があると仮定して、同グループの画素による反射点の推定を行い、推定された反射点に同グループに属する遅延時間の評価値と推定誤差によって決まる評価値を与え、近距離にある推定位置を統合することにより、同一対象物による可能性が高い推定位置を統合して、推定位置の確度を高める。
(もっと読む)
車両用レーダ装置
【課題】反射強度が低下した先行車両の検知可能距離の低下を抑制し、かつ、光学設計上の制約を少なくする。
【解決手段】距離検出を行うときには発光体140での発光を行わず、受光素子82に入射される光の強度に応じた受光信号が得られるようにし、距離検出を行わないときには発光体140での発光を行い、受光素子82における受光信号成分が一定値となるようにする。これにより、距離検出を行わないときの受光信号の波形から、一定値となる受光信号成分を差し引けば、ノイズ成分のみが残ることになる。そして、このときに得られるノイズ成分をバックグランドノイズ算出回路99で求めることにより、受光信号からノイズ成分を除去することが可能となる。これにより、レーダ装置の検知可能距離が低下することを防ぐことが可能となり、光学設計上の制約も少なくすることが可能となる。
(もっと読む)
マイクロ波ドップラーセンサ
【課題】 ドップラーセンサ自身の持つノイズや蛍光灯などの影響によるノイズの影響を受けることなく高精度に動体を検出することができるマイクロ波ドップラーセンサを提供すること。
【解決手段】 局部発振器11からの出力信号を送信アンテナ13から出射し、対象物20からの反射波を受信アンテナ14で受信する。出力信号は、第1ミキサ12に直接注入し、第2位相器17を介して第2ミキサ18に注入する。反射波は、第1位相器16を介して第1ミキサに入力し、第2ミキサへは直接入力する。各位相器は位相を90度遅らせる。動体からの反射波は、ドップラー効果により周波数変調されるので、各ミキサから混合信号として出力されるドップラー信号は位相差が180度生じる。第2ミキサによる混合信号を負帰還増幅器19を用いて局部発振器11で生成される信号を振幅変調する。ノイズ等の不要な振幅性雑音成分は位相差が生じないため抑圧される。
(もっと読む)
レーダ装置および類似装置
【課題】
複数のレーダアンテナから得られる探知データを正確に合成して表示するレーダ装置を提供する。
【解決手段】
レーダアンテナ11から得られた探知データは相関処理部91Aで相関処理される。レーダアンテナ21から得られた探知データは相関処理部91Bで相関処理される。レーダアンテナ21からの相関処理データと同じアドレスを指定するマスク画像は、マスク領域発生部32により設定されてマスク用画像メモリ62に書き込まれる。これら相関処理部91A,91Bの各相関処理データはレーダアンテナ11,21の設置位置に応じたアドレス設定がされており、相関処理部91Bの処理用画像メモリ902B、マスク用画像メモリ62は共通のアドレスが設定されている。表示用画像メモリ61は、マスクデータに従って入力された相関処理データを表示画面に設定されたアドレスに従って記憶するとともに表示器10に出力する。
(もっと読む)
レーダ信号処理装置及びドップラ気象レーダ
【課題】 降水エコーのドップラ速度が0m/s付近に集中している場合でも、降水エコーの減衰を招くことなく、地形エコーを除去することができるようにする。
【解決手段】 地形エコーの除去比SCR/速度幅W/速度Vと地形エコー有無判定用のスレッショルドを比較し、それらの比較結果から地形エコーが含まれているか否かを判定する地形エコー有無判定部15を設け、その判定結果が地形エコーが含まれている旨を示す場合、CMTI処理部16により地形エコーが除去されたIQデータを選択し、その判定結果が地形エコーが含まれていない旨を示す場合、地形エコーが除去される前のIQデータを選択する。
(もっと読む)
レーダ信号処理装置及びそれに用いるCFAR処理方法
【課題】 テストセルに対して複数の他目標信号、時間方向に拡がっているクラッタ、干渉信号等が平均化セル内に入る程度に近接して存在する場合であっても、テストセルの振幅値を低下させず、目標検出率の低下を回避可能なレーダ信号処理装置を提供する。
【解決手段】 CFAR処理器(1)1は受信信号中に含まれるクラッタ等の時間方向に拡がっている信号を抑圧する。大信号検出器2はその信号が抑圧された受信信号から閾値TH1を越える信号を検出し、大信号セル除去器3は検出された信号のセルを受信信号から除去する。CFAR処理器(2)4は大信号セル除去器3からの受信信号の平均化処理を行い、処理前の受信信号を平均化された受信信号で除算する。目標検出器5はCFAR処理器(2)4からの受信信号から閾値TH2を越えた信号を検出して目標信号として出力する。
(もっと読む)
目標検出装置
【課題】 船舶などの目標が生み出す引き波の影響を排除して真の目標を正確に検出し、真の目標がカメラの撮影範囲から逸脱しないようにカメラを制御することができる目標検出装置を得ることを目的とする。
【解決手段】 クラスタリング処理部6により検出された目標のビデオ領域における進行方向の広がり部分を検出し、その目標のビデオ領域から進行方向の広がり部分を除去する広がり除去部10を設け、その広がり除去部10により広がり部分が除去された目標のビデオ領域の重心位置を計算し、その重心位置に応じてカメラ16を制御する。
(もっと読む)
妨害波抑圧装置
【課題】 本発明は、妨害波抑圧装置における妨害抑圧機能の校正を可能とする。
【解決手段】 主アンテナ1(主CH)と補助アンテナ3(補助CH)のいずれか一方に、等化器7を接続し、サイドローブキャンセラ(SLC)5に供給される一方の信号の振幅または位相の少なくともいずれが調整可能に構成する。
励振器8から複数の校正周波数信号を供給し、校正制御器6は両CH信号間の周波数特性が温度等によって変化し、両CH信号間の振幅差あるいは位相差が変化したとき、それを検出し、それら変化が相殺されて補正されるように等化器7に対するウエイト制御を行う。これにより、SLC5に供給される両信号間の振幅差あるいは位相差が、広帯域にわたり常に一定となり、SLC5における妨害波抑圧性能の安定化が可能である。
(もっと読む)
レーダ信号処理装置
【課題】 クラッタや妨害の存在する環境下でも、クラッタ及び妨害の両者を十分抑圧する。
【解決手段】 補助アンテナ信号のFFT変換で得られる周波数バンク出力毎に設けられるプリプロセッサ回路1511〜15MBは、周波数バンク信号を入力してレンジセル単位に分割する第1のタップド・ディレイ・ラインTDL1の各タップ遅延信号をグラムシュミット型の第1のシストリックアレイ回路によるアダプティブ処理によって妨害成分を検出し、主アンテナ信号を入力してPRI単位に分割する第2のタップド・ディレイ・ラインTDL2の各タップ遅延信号をグラムシュミット型の第2シストリックアレイ回路によるアダプティブ処理によってクラッタ成分を検出する。これらの妨害・クラッタ検出成分を対応するフィルタバンクのキャンセレーション回路161〜16Bに入力して、主チャンネル信号中の妨害・クラッタ成分を抑圧する。
(もっと読む)
41 - 60 / 84
[ Back to top ]