
Fターム[5J070AJ05]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | 信号の除去又は付加 (166) | 不要映像の除去 (84)
Fターム[5J070AJ05]に分類される特許
61 - 80 / 84
ミリ波イメージング装置
【課題】画像を処理することにより、信号可干渉性に起因する歪みを除去した画像が得られるミリ波イメージング装置を提供する。
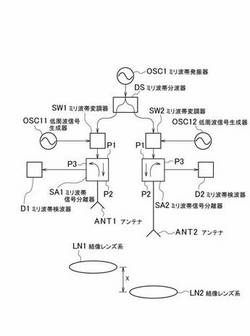
【解決手段】図1のミリ波イメージング装置は、受信されたミリ波により像を撮像する第1ミリ波帯撮像手段(SA1、D1)および第2ミリ波帯撮像手段(SA2、D2)と、
アンテナANT1、アンテナANT2、アンテナANT1が主軸上に配置される結像レンズ系LN1、アンテナANT2が主軸上に配置され、当該主軸が結像レンズ系LN1の主軸に平行な結像レンズ系LN2、を有するアンテナ送受信系とを備え、結像レンズ系LN1およびアンテナANT1からなる準光学系と、結像レンズ系LN2およびアンテナANT2とからなる準光学系の一方が他方に対し主軸方向にオフセットされていることで、ミリ波帯検波器D1の画像とミリ波帯検波器D2の画像を処理することにより、信号可干渉性に起因する歪みを除去した画像が得られる。
(もっと読む)
気象レーダシステム及びそれに用いられる信号処理方法

【課題】 本発明の気象レーダシステムは、信号処理工程を削減し構成を簡素化する。
【解決手段】 発射した電波の反射信号を受信し、受信した信号に基づき受信強度情報を検出し、この受信強度情報を用いて気象情報を取得する気象レーダシステムである。受信した反射信号について直交位相検波を行う直交位相(I/Q)検波部11と、前記直交位相(I/Q)検波部11の出力について高速フーリエ変換処理を行ってパワースペクトラムを求めるFFT処理部12と、前記FFT処理部12の出力から不要信号を除去する地形エコー除去部13と、前記地形エコー除去部13の出力に基づき受信強度情報を算出する受信強度算出部16とを具備する。
(もっと読む)
無線受信機におけるDCオフセット補正装置及び方法
【課題】 効率よく正確にDCオフセットを算出し、受信信号を補正して、受信利得の劣化を防止することができる、無線受信機におけるDCオフセット補正装置及び方法を提供する。
【解決手段】 無線受信機における受信信号に対してDCオフセット成分を除去する補正を行う装置が、DCオフセット成分算出対象範囲の中心となる基準値を決定する基準値決定部28と、その基準値決定部28によって決定された基準値を中心に一定の範囲幅を設定することにより、DCオフセット成分算出対象範囲を指定する範囲指定部30と、その範囲指定部30によって指定された範囲内に存在する受信信号に基づいてDCオフセット成分を算出し、受信信号全体から該DCオフセット成分を減算するDCオフセット減算部32と、を具備するように構成される。
(もっと読む)
不要波抑圧装置
【課題】 アンテナのサイドローブだけでなく、主ビーム方向やそれに近い方向から入射するクラッタなどの不要波を十分に抑圧することができる不要波抑圧装置を得ることを目的とする。
【解決手段】 ディジタルマルチビーム形成部5により形成された受信ビームのビーム信号を複数の帯域に分割するDFB6−nと、そのDFB6−nにより分割された複数のビーム信号に荷重計算部10により計算された荷重を乗算し、荷重乗算後のビーム信号を足し合わせて不要信号のレプリカを生成する加算器14等とを設け、そのDFB6−nにより分割された複数のビーム信号の中から主ビーム方向に対応している注目帯域のビーム信号から不要信号のレプリカを減算する。
(もっと読む)
周辺監視装置
【課題】 ドップラーセンサ1を用いて、該ドップラーセンサ1の設置位置周辺に位置する移動物体の動きを監視する場合に、外乱周波数が存在する環境下にあっても、監視すべき移動物体(特に人)の動きを正確に把握できるようにして、該移動物体の車両Cの車室内への侵入等を正確に予測できるようにする。
【解決手段】 FFT解析部13にてFFT解析により周波数レベルが求められた全バンド幅のうち所定の周波数範囲の最大及び最小周波数を含むバンド幅を除く少なくとも1つが、第1の設定レベル以上の周波数レベルとなる特定バンド幅である場合において、該特定バンド幅に対して周波数の高い側及び低い側にそれぞれ隣接する2つのバンド幅の周波数レベルが共に、上記第1の設定レベルよりも低い第2の設定レベル以下であるときには、外乱周波数除去部14にて上記特定バンド幅の周波数レベルを低下させる。
(もっと読む)
レーダ信号処理装置
【課題】 船舶などの目標を正確に検出することができるレーダ信号処理装置を得ることを目的とする。
【解決手段】 ASDEから出力されたレーダビデオのスレッショルドレベルを算出し、そのスレッショルドレベルより大きい振幅を有するレーダビデオを検知するヒット検定処理部6を設け、ヒット検定処理部6により検知されたレーダビデオに含まれているクラッタを縮小化する収縮処理を実施し、収縮処理後のレーダビデオに対する2次元移動平均処理を実施してノイズレベルを算出し、そのレーダビデオとノイズレベルを比較して目標とクラッタを区別する。
(もっと読む)
不要波抑圧装置
【課題】 アンテナのサイドローブだけでなく、主ビーム方向やそれに近い方向から入射するクラッタなどの不要波を十分に抑圧することができる不要波抑圧装置を得ることを目的とする。
【解決手段】 ディジタルマルチビーム形成部5により形成された受信ビームのビーム信号を複数の帯域に分割するDFB6−nと、そのDFB6−nにより分割された複数のビーム信号に所定の荷重を乗算し、荷重乗算後のビーム信号を足し合わせて不要信号のレプリカを生成する加算器14等とを設け、そのDFB6−nにより分割された複数のビーム信号の中から主ビーム方向に対応している注目帯域のビーム信号から不要信号のレプリカを減算する。
(もっと読む)
RFマネジメント装置及び電子戦システム
【課題】 不要波を除去して目標対象の電波を的確に探知することができるRFマネジメント装置を提供する。
【解決手段】 僚機Bのレーダ波周波数及びその位置と自機Aで探知した電波周波数及びその位置との比較結果に基づいて、僚機Bのレーダ波諸元を除去する除去器6と、僚機Bの妨害波周波数及び僚機Bの位置と自機Aで探知した電波周波数及びその位置との比較結果に基づいて、僚機Bの妨害波諸元を除去する除去器7と、自機Aのレーダ波送信周波数及び僚機Bで探知した脅威機Cの位置と自機Aで探知した電波周波数及びその位置との比較結果に基づいて、脅威機Cから自機Aへの妨害波諸元を除去する除去器8と、僚機Bのレーダ波送信周波数及び僚機Bで探知した脅威機Cの位置と自機Aで探知した電波周波数及びその位置との比較結果に基づいて、脅威機Cから僚機Bへの妨害波諸元を除去する除去器9とを備える。
(もっと読む)
スキャン型レーダ装置
【課題】 本発明は、レーダ制御部における信号処理能力を増強することを不要とし、精度良く広角化を図ることができるスキャン型レーダ装置を提供する。
【解決手段】 レーダ制御部内に備えられた制御対象認識部において、物標検出処理が実行されるとき、走査機構にスキャンビームの角度を指示したとき、隣接走行レーンを含めた3車線の範囲の物標を検出する必要がある場合、各ビームのスキャンされる角度と、3車線分の走行レーン幅とから、各ビームに係る有効距離Leが演算される。各有効距離Leは制御距離Lcの大きさと比較され、LeがLcより大きい場合、当該ビームに対する検出データ数をデフォルト値に設定する。LeがLcより短い場合、検出データ数のデフォルト値に比率Le/Lcを乗算して、当該ビームに対する検出ビーム数を求め、設定する。検出ビーム数が制限された分の処理時間を広角化に使用することができる。
(もっと読む)
追尾装置
【課題】偽像を目標とする仮説を排除しながら、効率的に追尾処理を行うことができる追尾装置を得る。
【解決手段】各センサで得られた受信電波から目標に当たり反射した反射電波を抽出する波形抽出部4と、2つのセンサに反射電波が到達する時刻の差によって等距離差双曲面を計算し、別の2つセンサの組み合わせからも等距離差双曲面を計算し、さらに複数の等距離差双曲面の交点であって、目標の位置である測位情報を計算する測位情報計算部5と、前記測位情報に基づいて、目標の運動諸元を推定する追尾フィルタから算出される目標の航跡と、航跡の組合せにより仮説を生成し、追尾処理を実施する多重仮説生成追尾処理部61と、前記多重仮説生成追尾処理部によって生成された仮説中に、偽像を目標と見なす仮説が含まれているか否かを判定し、含まれている場合には前記偽像を目標と見なす仮説を除去する仮説絞込み部62とを設けた。
(もっと読む)
障害物検出装置および方法
【課題】 レーダと画像認識とを融合させて、精度良く先行車両を認識することを可能とした障害物検出装置および方法を提供する。
【解決手段】 前方カメラで取得した画像についてエッジ検出を行い、そのうち白線に対応するエッジを除去して障害物エッジとする。レーダによる検出結果を基にしてレーダで検出した障害物位置に応じて所定の幅の領域を所定数に等分して各領域の障害物エッジ数からヒストグラムH(t)を算出する。H(t)と前回のタイムステップのヒストグラムH(t−Δt)を比較して、時間的連続性を満たすヒストグラム値を抽出して抽出ヒストグラムH’(t)とし、これと前回のタイムステップにおける抽出ヒストグラムH’(t−Δt)を比較して、時間的連続性を満たす領域から障害物を判定する。
(もっと読む)
ウィンドプロファイラ・システム
【課題】 観測データのうち正常なデータを残し信頼性が低いデータを削除する。
【解決手段】 信号処理装置2は受信した観測データからスペクトルデータを算出しスペクトルデータをモーメントデータに変換する。データ処理装置3はモーメントデータについて品質管理処理を行い、その結果のデータとスペクトルデータとから表示データを作成して観測データの再生を行う。品質管理処理部32は、5方向毎に視線風速の大きさについて高度毎,時間毎に周囲の視線風速の大きさと比較して所定の閾値外のものを排除する時空間チェックと、水平風速の東西成分に対する南北成分の比率について高度毎および時間毎に周囲の正接と比較して所定の閾値外のものを排除する時空間チェックを行う。
(もっと読む)
特定エリアを検出対象とするレーダ
【課題】 特定エリアを検出対象とするレーダの検出処理速度を向上させる。
【解決手段】 対象物に反射した反射波を受信してビート信号を生成するレーダ受信部201と、ビート信号から検出エリア103以外の信号を除外するフィルタ部202と、フィルタ処理されたビート信号をデジタル化するA/D変換部203と、デジタル化されたビート信号に対してFFT処理を行なうFFT処理部204と、FFTデータから対象物の距離や相対速度等を検出する車両検出部205と、を少なくとも備えるFM−CW方式のレーダを提供する。
(もっと読む)
測角レーダ装置
【課題】2つのアンテナ受信強度に基づいて検知対象物方向の角度を演算する測角レーダ装置において、その角度を精度よく求める。
【解決手段】送信アンテナ4から送信ビームを放射し、検知対象物からの反射ビームを2つの受信アンテナ5a,5bで受信する。受信ビームは、FM−CW送受信装置7及びA/D変換器8を経由して信号処理装置14に入力される。そして、アンテナゲイン差補正部18で、受信リファレンス信号メモリ部17から入力した受信アンテナ5a,5bのゲイン差のデータで受信ビーム強度を補正する。補正された受信ビームは、FFT処理部19で周波数解析され、CFAR処理部20で所定の閾値以上となるビーム強度が検知対象物からの成分として抽出される。周辺ノイズ補正部21は、抽出されたビーム強度から、その周波数近辺におけるビーム強度をノイズ成分として減算する。
(もっと読む)
レーダ装置および類似装置
【課題】探知領域内の物標(エコー)の状態や周辺環境によらず物標の探知画像データを確実に表示することができるレーダ装置を提供する。
【解決手段】挙動データ検出部11はスイープメモリ4から出力される探知データx(n)からWデータ発生部7で取り扱う探知画像データX(n)のレベル挙動を検出して今回のレベル検出データを生成する。挙動データメモリ12には過去数スキャン分のレベル検出データからなる前回の挙動データが記憶されており、挙動検出部11はこの前回の挙動データを今回のレベル検出データで更新し、Wデータ発生部7に出力する。Wデータ発生部7はこの挙動データから該当する画素の探知画像データの特徴を検出して、フィルタ演算データW(n)か、今回の探知画像データX(n)か、特定フィルタ演算データZ(n)のいずれかを選択して書込画像データY(n)として出力する。
(もっと読む)
マルチレーダシステム及びその制御方法
【課題】マルチレーダシステムの管制所に、航空機の正確な位置を正確に表示する。
【解決手段】GPS衛星1からのGPS信号をGPSアンテナ21、22で受信し、GPSクロック受信機31、32が正確な標準時刻(任意のタイムゾーン)をNTP(ネットワークタイムプロトコル)にてLAN91、92に出力する。LAN91、92に接続される信号処理プロセッサ41、42は、GPSクロック受信機31、32から出力される標準時刻を使用して、自身のシステムクロックを較正する。タイムスタンプ生成部101、102では、レーダ51、52で検出した航空機の位置情報に、航空機を検出した時刻をGPSクロックによるタイムスタンプとして付与する。タイムスタンプを付与された航空機位置データは、WAN6経由で情報処理装置7に伝送される。情報処理装置7では、レーダからの航空機位置データに対して、追尾処理(相関、予測、虚偽目標棄却)、位置算出処理を実行する。
(もっと読む)
パルスレーダー装置
【課題】本願発明は、受信パルス波のリークのみならず、パルスレーダー装置内で発生する送信パルスのリークの影響を低減して、リークによる誤検出を防止し、至近距離にある対象物までの距離も精度よく検出することのできるパルスレーダー装置を提供することを目的とする。
【解決手段】上記目的を達成するために、本願発明にかかるパルスレーダー装置は、送信アンテナが出力する送信パルス波やパルス発生回路が出力する送信パルスが受信アンテナや受信回路にリークしている期間は、受信パルスを検出しないように復調回路の出力を遮断する。
(もっと読む)
アンテナ装置
【課題】 主アンテナの利得やサイドローブが高い場合でも、そのサイドローブを覆うことのできる補助CHの出力を得て、SLC処理やSLB処理を実施する。
【解決手段】 妨害が無い環境で使用している主アンテナ1によるN本のマルチビームのうち、妨害環境下では、主アンテナ1のアンテナパターンを成形したM本のビーム信号を用いて、主アンテナ1のサイドローブの高い角度領域を覆い、サイドローブの低い広い角度領域は、利得の低いL個の補助アンテナ2による補助ビームで覆うようにする。この場合、主アンテナ1の高いサイドローブ領域は、主アンテナ1の開口全体を使ったビームを成形して、利得の高い補助ビームを形成し、主アンテナ1のサイドロ−ブの低い領域は小型の補助アンテナの補助ビームで覆うことにより、効率よく主アンテナ1のサイドローブを覆う補助ビ−ム信号を形成することができる。
(もっと読む)
周波数変調レーダの信号処理装置
【課題】ディジタル信号重畳に起因したビート信号上の不要信号誤検知を良好且つ適応的に抑制した周波数変調レーダの信号処理装置を得る。
【解決手段】ビート信号Bの周波数解析部1と、周波数解析部1の解析結果から目標物体を検出する目標検出部2と、周波数解析部1の解析結果からランダム雑音のレベルNiを検出するランダム雑音レベル検出部6と、周波数解析部1の解析結果からランダム雑音以外の不要信号のレベルUiを検出する不要信号レベル検出部3と、ランダム雑音・不要信号の各レベルNi、Uiに基づいて、不要信号除去用のスレッショルド値ThUを設定するスレッショルド値設定部5とを備えている。
スレッショルド値設定部5は、不要信号の発生が既知のビート周波数に対しては、不要信号・ランダム雑音の各成分の大きさからスレッショルド値ThUを設定し、目標検出部2は、スレッショルド値ThUを用いて目標物体を検出する。
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
61 - 80 / 84
[ Back to top ]