
Fターム[5J070AJ06]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | 信号の除去又は付加 (166) | 補間 (40)
Fターム[5J070AJ06]に分類される特許
1 - 20 / 40
レーダ装置
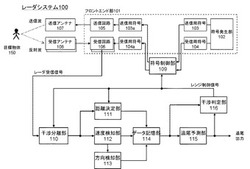
【課題】DDOA法に基づくレーダ装置においてDOAの不定性を軽減するためのレーダシステムを提供する。
【解決手段】レーダー装置は、距離、方向、速度を記憶するデータ記憶部114と、目標物体150の運動軌跡を予測する追尾予測部115と、レンジの近接を判定し、レンジ制御信号を生成する干渉判定部116と、レンジ制御信号に応じて送信用拡散符号、受信用拡散符号の一方に1チップ未満の位相オフセットを与える符号制御部109と、レンジ制御信号に応じて干渉除去処理を行う干渉分離部110とを備え、干渉分離部110は、レンジ制御信号に応じて、近接する目標物体の当該レンジの信号または当該レンジに隣接するレンジの信号の一方を選択し、距離決定部111、速度検知部112、方向検知部113の入力とする。
(もっと読む)
画像レーダ装置

【課題】目標とレーダの間の相対運動が未知である等の場合でも、回転運動によって発生する画像のぼけを精度よく補償することができるとともに、クロスレンジスケーリングを実施できるようにする。
【解決手段】レンジヒストリ取得回路1により取得されたレンジヒストリで、不要な並進運動によって発生するレーダと目標間の不要な距離変化を補償する並進運動補償回路2や、並進運動補償回路2により距離変化が補償されたレンジヒストリで、目標における高周波信号の各反射点で、回転運動によって発生するレンジ方向のぼけを補償する回転レンジセル移動補償回路3などを設ける。
(もっと読む)
レーダ装置
【課題】レーダ装置において生成する物標情報の信頼性を向上させること。
【解決手段】方位解析処理では、角度差絶対値abが閾値α以下となる到来波の組合せがあれば(S390:YES)、その組合せを構成する到来波についての到来方位θA,θBの中間地点を仮想方位とし、その仮想方位に受信波ビームを向けたときの電力を、仮想電力として導出する(S400)。その仮想方位及び仮想電力を方位情報の1つとして、到来波の各々についての到来方位θ及び到来電力(即ち、方位情報)に加えて登録する(S420)。つまり、方位解析処理では、複数の到来波に対する各到来方位のうち、隣接する2つの物標からの到来波に対する到来方位の間の角度範囲が分離能以下となる場合には、より確からしい方位情報として仮想方位及び仮想電力を導出し、物標認識処理にてペアマッチングを実行する際に用いる。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】信号処理によるミッシング対策を実現した信号処理装置を提供する。
【解決手段】スイープ間のレベル変化(例えば差分値)を検出し、基準パターンに照合してレベル変化パターンを出力する。スイープデータx(n)に対して、スイープデータx(n+1)が大きくなるパターン(パターンP)、スイープデータx(n)に対して、スイープデータx(n+1)が小さくなるパターン(パターンN)、それ以外のパターン(パターンZ)に分類する。ミッシング判定部153は、レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する。例えば、注目スイープデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンNであり、1つ後のスイープデータx(n+1)との変化パターンがパターンPである場合、ミッシングであると判定する。
(もっと読む)
地中レーダ
【課題】地中の埋設物を探知する地中レーダにおいて、路面上等に埋設物の埋設位置を容易に表示可能にする。
【解決手段】電磁波を送出する電磁波送信部5とこの電磁波の反射波を受信する電磁波受信部6とを備えたレーダ本体2を有し、電磁波受信部5からの受信波データAにより埋設物を探知する地中レーダ1において、レーダ本体2の移動位置を測定する位置測定部3と、レーダ本体2を移動させて埋設物を探知する際の受信波データAと受信波データA取得時に位置測定部3で得られるレーダ本体2の位置データBとに基づいて定まる埋設物の埋設位置データCを記憶する記憶部8と、再度、レーダ本体2を移動させた時に、当該移動の際に位置測定部3で得られるレーダ本体2の位置データBと記憶部8に既に記憶されている埋設位置データCとに基づいて埋設物11の埋設位置を表示する表示部4とを備える。
(もっと読む)
レーダ装置
【課題】レーダ装置において、自車両の走行環境が閉空間であるか否かを、当該レーダ装置単体で精度良く判定すると共に、物標の認識精度が低下することを防止すること。
【解決手段】取得したビート信号のパワースペクトルを求め(S140)、そのパワースペクトルから検出した周波数ピークに従って物標候補を認識する(S170)。さらに、パワー積分値が基準閾値以上であれば、走行環境が閉空間であるものと判定する(S180)。基準停止物ペアから、規定された方向に沿って接続基準距離の範囲内に存在する停止物ペアを順次接続してグループ化した停止物群によって形成される領域を道路端として認識する(S190)。ただし、接続基準距離は、走行環境が閉空間であれば、走行環境が開放空間であるときに比べて、短い距離に設定される。履歴追尾処理、物体認識処理(S200,S210)により、移動物体を認識する。
(もっと読む)
レーダ装置
【課題】従来のレーダ装置は、帯域幅を広げるため、複数レーダの観測信号に帯域の内挿・拡張を行うが、各レーダでの観測信号の位置ずれと位相ずれを推定して補償し、精度良く位置あわせと位相あわせを実施する必要がある。しかし信号対雑音電力比の低い環境では帯域の内挿・拡張の性能が著しく低下する。
【解決手段】それぞれ近傍に配設され、異なる周波数帯域で目標を観測する複数のレーダと、各レーダの信号に対して、信号空間の共分散行列を推定する共分散行列推定手段と、推定された各レーダの信号に対する共分散行列を合成する共分散行列合成手段と、合成された合成共分散行列を用い、超解像アルゴリズムにより高分解能レンジプロフィールを推定する超解像レンジ圧縮手段とを備える。
(もっと読む)
広帯域パルスレーダの距離計測方法
【課題】精度の高い距離計測が可能な広帯域パルスレーダの距離計測方法を提供する。
【解決手段】広帯域パルスレーダ信号の目標物からの反射波受信信号に対して各々異なる基底関数を使用する複数のウェーブレット変換を行なって各々ピーク値を算出する(ステップ23A,23B)。算出されたピーク値に補正を行ない(ステップ24)、この補正されたピーク値に基づいて距離算出を行なう。
(もっと読む)
追尾装置
【課題】大目標と小目標との観測値の取り合いによる追尾性能の劣化を回避し、高精度の航跡を生成可能な追尾装置を得る。
【解決手段】センサ10と、位置相関マトリクスを生成する位置相関処理部20と、セル数相関マトリクスを生成するセル数相関処理部30と、位置相関マトリクスおよびセル数相関マトリクスを用いて相関調停結果を生成する相関調停処理部40と、相関調停結果を用いて観測値クラスタを生成する位置クラスタリング処理部50と、統合セル数観測値を監視する統合セル数観測値監視処理部 60と、カルマンフィルタにより統合セル数推定値および更新後の統合セル数予測値を生成する統合セル数更新予測処理部70と、カルマンフィルタにより航跡の位置速度予測値および位置速度推定値を生成する位置速度更新予測処理部80と、遅延処理部90と、表示処理部100と、を備える。
(もっと読む)
誘導制御装置及び飛しょう体
【課題】誘導飛しょう体に搭載されるレドームの屈折等の影響による目標測角信号の補正を、多くの校正試験用のコストや期間をかけずに行い、高い誘導性能を備えた誘導制御装置を得る。
【解決手段】特定の範囲の測角方向のみに限定して校正を実施し、測角方向が範囲外となった場合には、範囲内となるように誘導飛しょう体の姿勢角を変化させ、その際の姿勢角変化量と測角方向の変化と校正済みの測角方向バイアス値に基づき、動的に任意の測角方向バイアス値を決定するようにした。
(もっと読む)
ストリーミング測定値からストリーミング信号を再構築するための方法
【課題】方法が、測定値の作業セット、測定システムの作業スナップショット、内部作業信号推定値、及び外部作業信号推定値を保持することによって、ストリーミング測定値からストリーミング信号xnを再構築する。
【解決手段】現在の測定値の作業セットを使用して、内部作業信号推定値、測定システムの作業スナップショット、及び信号スパース性のモデルが精緻化される。外部作業信号推定値がリフレッシュされる。外部作業信号推定値の係数のサブセットが出力にコミットされる。次のストリーミング測定値及び対応する次の測定ベクトルが受信される。測定値の作業セット、測定システムの作業スナップショット、及び内部作業信号推定値が更新されて、次の測定値及び対応する測定ベクトルが組み込まれる。最も古い測定値及び対応する最も古い測定ベクトル、並びにコミットされた係数のサブセットの効果が除去される。
(もっと読む)
表示装置及び表示方法
【課題】表示された画素の情報に基づいて、画素抜けが発生した領域における画素を補完する表示装置及び表示方法を提供する。
【解決手段】互いに隣接する2つのスイープライン及び表示領域によって形成される補完領域において、スイープライン上に位置しない画素である未描画画素を検出する検出手段11と、補完領域から、少なくとも1つの未描画画素を含む複数の領域に分割した部分補完領域を、極座標形式から直交座標系式に変換して仮想的に算出する算出手段12と、未描画画素を、部分補完領域毎にスイープの中心から半径方向外側へ描画することで未描画画素へ描画の補完を実施する描画手段13とを備える。
(もっと読む)
障害物検出装置
【課題】近距離においても物標の位置を精度良く得る。
【解決手段】センサ2で物標を検出する障害物検出装置1において、センサ2により物標が検出されていた状態から該物標が検出できない状態となったときに、センサ2により物標が検出されていた状態のときの該物標の位置及び速度情報と、センサ2で物標を検出することができなくなったときからの経過時間と、から、センサ2により物標を検出できないときの該物標の位置を推定する推定手段83を備える。
(もっと読む)
レーダ装置
【課題】送受信の同期を取るための信号配線を不要として耐ノイズ性を向上すると共に搭載上の自由度を高め、コスト低減を図る。
【解決手段】送信パルス生成部2aで送信タイミングクロックTxCLKによる送信パルスTxを生成し、送信アンテナ2bから送信する。ターゲットで反射された信号は受信アンテナ3aで受信され、送信タイミングクロックTxCLKとは独立した受信タイミングクロックRxCLKに基づくサンプリングパルスがサンプリング設定部3bで生成され、サンプルホールド部3cで受信信号Rxがサンプルホールドされる。更に、サンプリングデータから一定時間間隔の受信信号のデータをサンプリングデータ補間部3dで推定し、非サンプリング区間を補間する。これにより、送受信の同期を取るための信号配線を不要として耐ノイズ性を向上すると共に搭載上の自由度を高め、コスト低減を図ることができる。
(もっと読む)
レーダ装置
【課題】レーダの反射波が飽和していても物標を適正に探知可能にすることを課題とする。
【解決手段】電波の反射波で物標を探知するレーダ装置1であって、反射波を受信する信号処理部10と、信号処理部10から得た信号をフーリエ変換して物標を探知する演算処理部2と、を備え、演算処理部2は、信号処理部10から得た信号の波形の一部が飽和している場合、飽和していない有効な部分の波形に基づいて生成した近似式を使って飽和している部分を補間し、波形を補間した信号をフーリエ変換して物標を探知する。
(もっと読む)
物体検知方法
【課題】 レーダー装置により至近距離の物体を確実に検知できる物体検知方法を提供する。
【解決手段】 検知されたターゲットと同方向で距離が2倍の位置にダミーターゲットを設定し、ダミーターゲットの位置を含む所定範囲に倍波ターゲット検知範囲を設定し、倍波ターゲット検知範囲に検知されたターゲットを倍波ターゲットとして判定し、倍波ターゲットと同方向で距離が2分の1の位置に補間ターゲットを設定し、補間ターゲットの位置を含む所定範囲に基本波ターゲット検知領域を設定し、基本波ターゲット検知領域に基本波ターゲットが検知されない場合に補間ターゲットを基本波ターゲットとして出力する。このように、検知すべき基本波ターゲットが至近距離において非検知状態になっても、依然として検知されている倍波ターゲットから算出した補間ターゲットにより基本波ターゲットのデータを推定して出力することで、基本波ターゲットを継続的に検知し続けることができる。
(もっと読む)
レーダ画像処理装置
【課題】軌道差で生じた位相差を除去して、正確にずれ量推定を行う。
【解決手段】互いに異なる軌道から同一の観測対象を観測した複数のレーダ画像を格納するレーダ画像A,B格納部1110,1120と、軌道情報に基づき、軌道差により発生したレーダ画像間の位相補正量を算出する軌道に基づく位相差算出部1230と、位相補正量に基づき、レーダ画像の位相を補正する位相補正部1300と、位相補正したレーダ画像間の相互相関を計算する相互相関計算部1400と、相互相関からレーダ画像間のずれ量を推定するずれ量推定部1500と、ずれ量の推定結果に基づき、レーダ画像同士が互いに重なるようにレーダ画像をずらしてリサンプルするリサンプル部1600と、リサンプル結果を格納する出力格納部1700とを備えている。
(もっと読む)
送信信号と受信信号とを分離しかつ妨害放射を抑制する装置を持つレーダシステム及び方法
特に物体の相対速度を求めかつ検出感度を高めるため、送信アンテナ毎に1つの測定サイクルにおいて、それぞれ同じ又は類似な個別信号の1つ又は複数の場合によっては交互配置される列が放射され、これらの個別信号の時間間隔が、平均して、最大に関心のある距離に対応する受信される信号の伝搬時間より大きいように構成されている、周辺検出用レーダシステム。複数の受信手段が設けられ、これらの受信手段において、物体における反射により受信される信号が高周波信号と混合され、それにより個別信号の列を表す低周波受信信号が生じ、順次に続く低周波受信信号にわたって、個別送信信号及び/又は混合のために使用される高周波信号及び/又は低周波個別信号自体の位相位置が変化されることによって、個別受信信号の位相位置が変化される。 (もっと読む)
レーダ装置及び信号処理方法
【課題】連続する送信パルス信号の変調方式を互いに相関性の低い変調方式に切り替えることで1次エコー及び2次エコーの両方を用いて目標を観測する場合であっても、ブランク領域のない観測結果を取得する。
【解決手段】レーダ装置は、送信パルス信号の変調方式を一パルス毎に互いに相関性の低い変調方式に切り替えて送信すると共に、その送信パルス信号のPRFを所定のタイミングで他のPRFへ切り替えることで目標を観測する。そして、観測結果におけるブランク領域を他のPRFにより取得された観測結果に基づいて補間する。これにより、レーダ装置は、観測結果におけるブランク領域を解消することが可能となる。
(もっと読む)
鳥または飛行物体の検知方法
本発明は、少なくとも1つのレーダ(5)の形式の、少なくとも1羽の鳥または別の飛行物体の電波を検出する手段を使用し、各レーダ(5)からのアナログ画像をデジタル画像に変換し、外側安全領域(7)と内側安全領域(8)を前記画像に適用してレーダ(5)毎に安全空間を生成し、次に、安全領域(7、8)内で検出があった場合に措置をとることにより、単一の風力タービン(1)に対する鳥または物体の飛行レベルを検出する方法に関する。 (もっと読む)
1 - 20 / 40
[ Back to top ]