
Fターム[5J070AJ10]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | 信号合成又は組合せ (189)
Fターム[5J070AJ10]に分類される特許
61 - 80 / 189
電波発射源可視化方法および装置
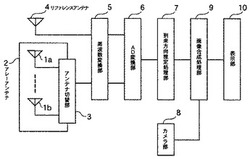
【課題】電波発射源の部位と、そこから発射される電波の周波数とを、容易に特定する。
【解決手段】電波発射源からの電波を受信する複数のアンテナ素子1a〜1bからなるアレーアンテナ2と、このアレーアンテナ2およびリファレンスアンテナ4で受信した電波ダウンコンバートする周波数変換部5と、アナログ信号をディジタル信号に変換するA−D変換部6と、到来方向推定処理部7と、この到来方向推定処理部7の出力位置情報とカメラ部8によって撮影された撮影画像とを合成する画像合成処理部9と、この画像合成処理部9から受けた合成画像を表示する表示部10とから構成され、前記到来方向推定処理部は到来方向推定処理に用いた複数の電波の周波数を抽出すると共に、抽出された周波数に対して、前記画像合成処理部において、各周波数に対応する異なる色情報を付与することにより、前記複数の電波の到来方向と共に電波の周波数を色表示する。
(もっと読む)
レーダ装置及び物標位置検出方法

【課題】ビーム角度ごとの反射ビームの強度が複数の極大値を有するような分布形状を形成したときに,1つの物標からの反射ビームによるものであるかを判別して,精度よく物標位置を検出する。
【解決手段】スキャン式レーダ装置により,所定のビーム角度ごとに順次ビームを射出してスキャンを行い,ビーム角度ごとの反射ビームの強度の分布形状を求め,スキャンごとに分布形状が極大値を示す角度方向を1つの物標位置として検出する。そして第1のスキャンにおいて1つの極大値を有する第1の分布形状が形成された後,第2のスキャンにおいて複数の極大値を有する第2の分布形状が形成され,且つ第1の分布形状を形成する反射ビーム本数の合計と第2の分布形状を形成する反射ビーム本数の合計との差が基準値以下である場合は,当該第2のスキャンでは第2の分布形状に基づき1つの物標位置を検出する。
(もっと読む)
レーダ装置
【課題】回路規模を大きくせずに、不要波の抑圧、角度分解能の向上、マルチパス環境下おける角度精度の向上等を図ることができるレーダ装置を提供する。
【解決手段】円開口が形成されるように一方向に配置し、且つ該一方向に直交する方向に開口分割した複数のサブアレイを含む1次元DBFアレイアンテナ4と、1次元DBFアレイアンテナの複数のサブアレイから送られてくるモノパルス合成前のサブアレイ信号に対して信号処理を行う信号処理器6とを備えている。
(もっと読む)
物標検出装置、物標検出方法、およびコンピュータが実行するためのプログラム
【課題】ピーク周波数成分が低周波領域に埋もれた状態から復帰してきた場合に、このピーク周波数成分が折り返しピーク周波数成分であるか否かを高精度に判定し、衝突寸前まで高精度な物標検出を行うことが可能な物標検出装置を提供することを目的とする。
【解決手段】本発明に係る物標検出装置は、FMCW方式を用いて検出した信号に周波数解析処理を施すことによって得られるピーク周波数成分のペアを用いて物標検出を行う第1の検出手段と、前記第1の検出手段と異なる方式で物標検出を行う第2の検出手段と、低周波数成分に埋もれていた前記ピーク周波数成分のペアの一方が復帰した場合、前記第2の検出手段の検出結果に基づいて、当該復帰したピーク周波数成分が折り返しピーク周波数成分であるか否かを判定する判定手段と、前記判定手段の判定結果に基づいて、前記第1の検出手段の物標検出方法を選択する選択手段と、を備えている。
(もっと読む)
目標位置確認システム及びレーダ信号処理装置
【課題】レーダ設置場所から見た移動目標の方位・距離のずれ調整作業を迅速かつ適切に行えるようにし、これにより作業の精度向上と作業時間短縮を図ることを可能とする目標位置確認システムを提供する。
【解決手段】滑走路RWY周辺に既知のGPS装置200を設置するだけでよく、またGPS装置200にPAR100への計測位置情報の送信機能を持たせることで、PAR100において自装置の経度緯度情報とGPS装置200の計測位置情報とを利用して、PAR100から見た航空機の方位・距離のずれを容易に調整できるようにしている。
(もっと読む)
パッシブレーダ装置
【課題】各パッシブセンサと処理装置との間におけるデータ量を削減してセンサの小型軽量化およびシステムの秘匿性を確保し、かつ各センサの位置変更等にかかわらず所望の方位について正確な処理データを得る。
【解決手段】各パッシブセンサは、自己位置を取得する位置情報取得手段、自己位置と他センサの位置情報から自己の絶対方位を算出する絶対方位算出手段、処理装置側が指示した観測方位と自己の絶対方位に基づいて特定方位の受信信号のみの選択を制御する受信制御手段、無指向性受信空中線で取得した受信信号の中から選択した特定方位の信号のみを自己位置、絶対方位と共に処理データとして送る探索データを生成する受信手段を備え、処理装置は、各センサからの処理データに基づいて目標の検出、測位を行う信号処理手段、目標の追尾処理を行うデータ処理手段を備える。
(もっと読む)
送受信モジュール及びフェーズドアレイレーダ装置
【課題】フェーズドアレイレーダ装置において送受信モジュールの状態が不定になったとき、所定方向に意図しないレーダ信号が送信されることを抑制する。
【解決手段】フェーズドアレイレーダ装置を構成し、レーダ信号を送信する複数のアンテナ素子に各々接続される送受信モジュールであって、送信信号の移相量を設定する移相手段と、この送受信モジュールが安定しているときは、前記制御回路の出力する所定の移相量データを前記移相手段に出力し、この送受信モジュールが不定なときは、ランダムデータ又は所定の移相量データにランダムデータを加算したデータを前記移相手段に出力する移相制御手段と、を有する。
(もっと読む)
通信制御方法及びこれを用いたレーダシステム
【課題】 複数のセンサ装置から送信される大量の探知データを効率的に受信する。
【解決手段】 複数のセンサ装置から共通の情報処理装置に対して送信される目標物の探知データの通信量を制御する通信制御方法において、前記共通の情報処理装置は、複数のセンサ装置からそれぞれ送信された探知データを受信する工程と、それらの受信した探知データの通信量から前記複数のレーダ装置と情報処理装置との間の通信負荷を計算し、その通信負荷に応じた通信許可範囲を求める工程と、その求めた通信許可範囲を前記複数のレーダ装置に指示する工程とを備えた。
(もっと読む)
広帯域レーダ装置及びその移動物体検出方法
【課題】広帯域レーダ装置において、移動物体の位置検出精度を高め、かつ信号を変換するときの計算回数を少なくすることである。
【解決手段】2次元座標上の距離を示す距離設定値を設定する(S13)。設定した距離設定値に応じた角度ステップ(角度間隔)を計算する(S114)。次に、計算により求めた角度ステップに基づいて角度を設定する(S15)。1次元のUWBレーダパルス応答差分信号から、距離設定値と角度により定まる2次元平面上の該当する位置の受信信号強度を計算する(S15)。これにより1次元の信号が2次元のUWBレーダパルス応答差分信号に変換される。
(もっと読む)
電磁波による鉄筋コンクリート構造物の非破壊検査装置及び方法
【課題】 内部に鉄筋が埋め込まれた鉄筋コンクリート構造物のクラック、空洞等からの反射波信号をより確実に検出する。
【解決手段】 内部に鉄筋9が埋め込まれた鉄筋コンクリート構造物6の表面上の複数位置に移動可能な検査装置本体1と、検査装置本体に搭載され、鉄筋コンクリート構造物に向けて電磁波を照射する電磁波照射手段2と、検査装置本体に搭載され、前記電磁波照射装置から照射された電磁波の反射波信号を取得する受波手段3と、受波手段によって取得された反射波信号を信号処理することによって鉄筋コンクリート構造物の欠陥を検出する信号処理手段4とを有し、受波手段は、検査装置本体の移動にともなって、位置の異なる複数の反射波信号を取得し、信号処理手段は、前記受波手段によって取得された位置の異なる複数の反射波信号を加算又は平均することによって前記鉄筋からの反射波信号成分を低減し、鉄筋コンクリート構造物の欠陥を検出する。
(もっと読む)
レーダ装置
【課題】絶対位相を求めることにより位相変化を補正する手段を備えたレーダ装置。
【解決手段】図1は、レーダ装置の受信チャンネル部を示すブロック図である。信号線路L1、L2、L5、L6から入力する信号は位相が同期している。信号線路L1より入力した周波数77GHzの信号を、信号線路L6より入力した周波数5MHzの信号を用いてオンオフ変調させる。その後信号線路L2より入力した周波数77GHzの信号とミキサ13で混合し、信号線路L5より入力した周波数5MHzの信号を用いて直交復調し、位相値を検出する。反射波の受信による受信信号の検出位相から、この位相値を引くことで位相値を補正している。
(もっと読む)
レーダ
【課題】高い検知確率と低い誤検知確率を併せ持ち、距離に応じた検出精度と応答性が確保できるようにしたレーダを構成する。
【解決手段】複数の計測タイミングで取得された探知情報のうち同一反射体に起因して生じたものと予測した探知情報を基にして反射体に相当する物標の追尾を行うとともに、追尾中の物標が同一反射体に起因して生じたものと見なされる度合いを表す追尾信頼度(計測タイミングの回数MとそのM回の計測タイミングで取得された探知情報のうち同一反射体に起因して生じたものと見なされる回数N)の条件を複数組設定し、いずれか1つが満足されるとき、その反射体を真物標として検知する。
(もっと読む)
車両用障害物検出装置及び車両制御システム
【課題】検出対象とする障害物が低速で移動する場合であれ、その移動態様を的確に判定する車両用障害物検出装置及び車両制御システムを提供する。
【解決手段】レーザレーダ装置により検出される自車両から障害物までの距離及び自車両を基準とした障害物が位置する方位に基づき、自車両を基準とした障害物の相対位置を所定の周期で検出する。また、車速センサにより検出される自車速、ステアリングセンサにより検出される操舵角、及びヨーレートセンサにより検出されるヨーレートに基づき自車両の移動量を算出し、先に求めた相対位置にこの移動量を加味することで障害物の絶対位置を算出する。そして、障害物の絶対位置のばらつきの広がりに応じた大きさの値を返す評価関数を通じてばらつき度合Pdを算出し、このばらつき度合Pdに基づき障害物の移動態様を判定する。
(もっと読む)
精測進入レーダ装置
【課題】簡単な構成で、精測進入レーダ装置における送受信器の故障を検出する。
【解決手段】本発明の精測進入レーダ装置は、第1の切換えスイッチ2と第2の切換えスイッチ5を個別に切換え可能な制御器8Aを備えたので、方位空中線部3で送信したレーダ送信信号の目標(9)反射信号を高低空中線部4で受信したり、反対に高低空中線部4で送信したレーダ送信信号の目標反射信号を方位空中線部3で受信する。
そこで、方位空中線部3の送受信器3a,3dと高低空中線部4の送受信器4a,4dとは、構造及び機能が同等に形成されることから、制御器8Aによる同一目標物(ターゲット)9に対する送受信器3a,3d、4a,4dの組み合わせ構成による受信信号レベルの観測値と、正常であるとされる基準レベル(許容限度)との比較から、簡単な構成で、送受信器3a,3d、4a,4dの異常、あるいは故障の有無を検出できる。
(もっと読む)
レーダ装置及びレーダ画像表示方法
【課題】異なるパルス幅の信号から得られた画像を同一画面上に同時に表示する場合であっても、すべてのレンジで同じ内容の追尾物標の運動情報を表示できるレーダ装置及びレーダ画像表示方法を提供することを目的とする。
【解決手段】所定の送信パターンで送信した2以上の異なるパルス幅信号を受信し、該受信した同じ送信パルス幅のエコー信号毎に、探知レンジに対応する表示用エコーデータを生成するエコーデータ生成部と、異なる送信パルス幅のエコー信号を用いて、表示用エコーデータと重畳する1つの追尾物標の運動情報を生成するARPA処理部と、前記ARPA処理部で生成された追尾物標の運動情報を、前記表示用エコーデータに重畳する表示出力合成部と、前記表示出力合成部で重畳した画像を表示する表示部とを備えることを特徴とする。
(もっと読む)
画像レーダ装置
【課題】雑音や他の反射点の影響を低減しながら、位相やレンジの補償誤差を低減することができる。
【解決手段】移動する目標に対して電波を送信し、前記目標からの反射波を受信して、レンジプロフィールの時間履歴であるレンジヒストリを生成し、前記レンジヒストリのクロスレンジ圧縮により前記目標の画像を得る画像レーダ装置であって、レンジヒストリのドップラ周波数の時間変化の原因となる位相変化を推定して補償するための位相補償量を推定するための参照データ列を切り出しする低干渉参照データ抽出手段8を備え、低干渉参照データ抽出手段8は、参照データ列を切り出しする際に、レンジヒストリをレンジ方向に補間して、補間後のデータから最適な参照データ列を抽出するレンジ補間手段を有している。
(もっと読む)
パルスレーダ装置
【課題】時間差分を求める際の時間差を調節することによって、所望の対象物の移動速度に応じた効率の良い検出方法を提供することができるパルスレーダ装置を提供する。
【解決手段】パルス状の電波を対象物に向けて送信する送信部1と、この送信部1を間欠送信する際の時間間隔を制御するパルス制御部2と、対象物からの反射波を受信アンテナ3で受信する受信部4と、受信部4からの受信信号の波形を複数蓄積する履歴蓄積部5と、履歴蓄積部5からの複数の履歴信号を用いて受信信号との差分を求める差分演算部6と、差分演算部6から得られる差分信号の波形立ち上がりタイミングを検出する検出部7と、パルス制御部2からの制御信号と検出部からの検出信号を用いて移動成分の距離を求める距離演算部8と、を設けた。
(もっと読む)
距離測定センサ及びこれを用いた距離測定方法
【課題】CW信号を継続的に送受信するCWモードと、所定時間の間のみにCW信号を送受信するパルスモードで動作できる距離測定センサ及びこれを用いた高精密度の距離測定方法を提供する。
【解決手段】電力増幅器を制御する第1スイッチと;基準信号と受信信号を自身の入力信号として受け入れ、二つの信号の位相差を通して高周波信号の電力で表現される距離情報を生成する6ポート回路と;周波数固定発振器と前記6ポート回路との間に設置されて前記基準信号を制御する第2スイッチと;前記6ポート回路から発生する前記高周波信号の電力をDC電圧に変換して演算処理可能なデータに変換し、距離データとして計算する中央演算処理装置と;を備えて距離測定センサを構成する。
(もっと読む)
漏洩同軸ケーブルを用いた位置検出システム
【課題】建物内等のマルチパスが生じるような環境下においても被検出体の位置を精度よく検出することができる漏洩同軸ケーブルを用いた位置検出システムを提供する。
【解決手段】所定の場所に配設された漏洩同軸ケーブルと、この漏洩同軸ケーブルの両端にそれぞれ接続されて、該漏洩同軸ケーブル内に異なる周波数の信号をそれぞれ送出する一対の送信機と、これら一対の送信機からそれぞれ送出されて、前記漏洩同軸ケーブルから電波として空間に放射される前記信号をそれぞれ受信する受信機とを備え、前記受信機は、受信した前記各信号の受信電界強度をそれぞれ測定するレベル測定部と、このレベル測定部が測定した前記信号の受信電界強度の差分値により前記漏洩同軸ケーブルの一端から前記受信部に至るまでの距離を求める距離演算部とを備える。
(もっと読む)
無線ICタグの位置特定システム、並びに位置特定装置
【課題】無線ICタグの向き(指向性)をリーダ/ライタのアンテナの指向性に対して、常に最良の向きに装着されない、又は移動するなど、ばらばらなため、無線ICタグが十分な電波強度でリーダ/ライタからの読み取り電波を受信できないという問題を解消して、無線ICタグの安定した読み取りを可能にし、無線ICタグの位置を正確に特定する。
【解決手段】この位置特定システムは、読取り用の使用周波数を切替えながら、異なる偏波の方向を有する電波である垂直偏波、水平偏波、右回り円偏波、左回り円偏波などを用いて、固有IDを記憶した無線ICタグから固有IDを読み取る、複数のリーダ/ライタと、異なる偏波の方向を有する電波を用いてリーダ/ライタに固有IDの読み取りを行わせた結果、異なる偏波の方向を有する電波ごとに得られた、各固有IDについての受信信号の強度を用いて、無線ICタグの位置を算出する位置特定装置とを有する。
(もっと読む)
61 - 80 / 189
[ Back to top ]