
Fターム[5J070AJ13]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | ビデオメモリを持つもの (762)
Fターム[5J070AJ13]の下位に属するFターム
複数のビデオメモリ (126)
Fターム[5J070AJ13]に分類される特許
61 - 80 / 636
探知作業用シート及びこの探知作業用シートを用いた地中レーダシステム
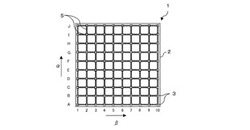
【課題】地中レーダのオペレータの作業負荷の低減を低コストで実現可能な探知作業用シート及びこの探知作業用シートを用いた地中レーダシステムを提供する。
【解決手段】地中に向けて電磁波を送出する電磁波送信部と送出された該電磁波の反射波を受信する電磁波受信部とを備えた地中レーダ11を移動させるための測定線5が格子状に描かれたシート部材2の各測定線5の少なくとも一端に、その点の位置情報を有する位置情報媒体3を設けて構成し、地中レーダ11に備えた読取部12によって位置情報を読取らせるように構成する。
(もっと読む)
測角装置、レーダ装置、測角方法及び測角プログラム

【課題】マルチパス環境下において、短時間でより精度の高い仰角推定を可能とする測角装置等を提供する。
【解決手段】測角装置としての測角処理器5は、第1仰角算出部51、第2仰角算出部52及び直接波仰角出力部50を備えたことを特徴とする。第1仰角算出部51は、受信信号に基づいて直接波仰角及び間接波仰角を算出する。第2仰角算出部52は、受信信号に基づいて直接波仰角のみを算出する。直接波仰角出力部50は、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出された場合は第1仰角算出部51で算出された直接波仰角を出力し、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出されなかった場合は第2仰角算出部52で算出された直接波仰角を出力する。
(もっと読む)
気象情報提供システム及び気象情報提供方法
【課題】ドップラエコーがない領域に存在する目標の風向風速情報を取得することができ、目標の離発着時のより品質の高い気象情報に特化した観測を行うことも可能であり、得られた風向風速情報を有効に伝えることができるようにする。
【解決手段】空港観測用に特化した、ブラッグ散乱エコー対応の気象レーダ13を用い、ASR/SSR11で検出される航空機の位置・高度情報に対応する降雨及び風向風速情報を取得し、さらに気象予測モデル処理装置14から位置・高度情報に対応する気象予測情報を取得して、それぞれターゲットレポート情報に付加し、当該レポート情報を管制官、パイロットへ適切に送信する。
(もっと読む)
二次監視レーダ装置及びそのデータ処理プログラム
【課題】信頼性が高く、誤りの少ない高度情報を得ることができる二次監視レーダ装置を提供する。
【解決手段】実施形態の二次監視レーダ装置は、航空機に搭載されるトランスポンダに対して、高度情報を得るための質問信号を複数回連続して送信する送信部と、質問信号に応答してトランスポンダから送信される複数の応答信号を受信する受信部と、受信した複数の応答信号のデータを、複数の高度データにそれぞれ変換するコード変換部と、複数の高度データのうちの連続する第1及び第2の高度データにおいて、後に受信された第2の高度データが示す第2の高度が、先に受信された第1の高度データが示す第1の高度に対して所定の許容範囲内にある場合に、第1及び第2の高度データは相関があると判定し、第2の高度を前記航空機の高度情報として出力する、データ処理部と、を備える。
(もっと読む)
レーダ装置及びカーブ判定プログラム
【課題】前方がカーブしている道路であるか否かを判定する。
【解決手段】電波を送信する送信アンテナ3と、送信された電波が対象物により反射された電波を受信する複数の受信アンテナ11〜1nと、受信された電波の方位毎に対象物と受信アンテナ11〜1nとの相対距離に対する受信された電波の強度の関数を算出するDBF処理部23と、受信された電波の方位毎にDBF処理部23により算出された関数から代表点を抽出する代表点抽出部と、代表点抽出部により抽出された前記受信された電波の方位毎の代表点の距離を比較することにより、前方がカーブしている道路であるか否かを判定するカーブ判定部と、を備える。
(もっと読む)
FMCWレーダーシステム
【課題】1つのアンテナで間欠的に送受信を行う場合にもターゲット検出能力の劣化を防止することのできるFMCWレーダーシステムを提供する。
【解決手段】送信部と、アンテナと、受信部と、アンテナ共用部とを備えるFMCWレーダーシステムであって、送信部がローカル信号発生部と、送信信号発生部と、送信側ミクサと、間欠的に送受信開始指令を出力する送信側制御部と、を備え、受信部が、ビート波を生成する受信側ミクサと、ハイパスフィルタと、ターゲット情報抽出部と、を備え、送信信号発生部が、送受信開始指令の読み込み後に、振幅が零から所定の振幅まで徐々に大きくなる振幅漸増信号、周波数が所定の範囲で連続的に変化するチャープ信号、および振幅が零まで徐々に小さくなる振幅漸減送信信号を順次出力する。
(もっと読む)
車載用のマルチビーム方式レーダ装置、マルチビーム方式レーダ方法およびマルチビーム方式レーダプログラム
【課題】ターゲットに関する検出を高精度に行うことができる車載用のマルチビーム方式レーダ装置を提供する。
【解決手段】車載用のマルチビーム方式レーダ装置101は、送信波を送信し、当該送信波がターゲットによって反射されて到来する受信波を受信するアンテナを構成する複数のビーム素子2−1〜2−Mと、希望の仮想的なアレーアンテナの素子数と素子間隔に対応して、前記複数のビーム素子2−1〜2−Mにより受信した受信波のデータであるビーム素子データをフーリエ変換して、仮想アレーデータを生成し、生成した前記仮想アレーデータに基づいて所定の処理を行う処理部(信号処理部8の方位検出部)と、を備えることを特徴とする。
(もっと読む)
レーダ信号処理装置
【課題】 従来のV−chirp方式では、クラッタ環境化において目標からの受信信号のパルスのピークがクラッタ信号に覆われて、目標を検知できない可能性があり、これを改善することのできるレーダ信号処理装置を得る。
【解決手段】 レーダ信号処理装置は、アップチャープまたはダウンチャープの変調をかけた偏波信号を目標に対して送信し、目標からの反射波を偏波受信し、A/D変換により得られた受信ビデオ信号に偏波信号処理を施すことにより、クラッタを抑圧し、抑圧後の受信ビデオ信号をパルス圧縮し、パルス圧縮により生成された信号から目標までの距離を算出し、アップチャープ受信ビデオ信号及びダウンチャープ受信ビデオ信号をパルス圧縮することにより得られた信号の強度に基づく距離の差から、目標との相対速度、相対距離を算出することができる。
(もっと読む)
センサ統合システム及びセンサ統合方法
【課題】複数種類のセンサによる観測データを組み合わせて、目標物の高精度な移動軌跡を抽出する。
【解決手段】プロセッサと、前記プロセッサに接続される記憶装置と、前記プロセッサに接続される出力装置と、を備えるセンサ統合システムであって、前記記憶装置は、複数のセンサによって観測された観測データを保持し、前記観測データはあらかじめ規定された項目のうち選択的に記述された項目を含み、前記プロセッサは複数の前記観測データの選択記述された前記項目を組み合わせ、一つ以上の目標物の移動軌跡を推定し、前記出力装置は、前記移動軌跡を示す情報を出力する。
(もっと読む)
レーダ装置、レーダ受信装置及び目標検出方法
【課題】 目標が低RCSである場合であっても、目標を検出することが可能なレーダ装置と、このレーダ装置で用いられるレーダ受信装置及び目標検出方法を提供すること。
【解決手段】 レーダ装置は、送信装置、無線部、4次元データ生成部、予測部、積分処理部及び目標検出部を具備する。送信装置は、送信パルスを送信する。無線部は、送信パルスが反射等された反射パルスを受信する。4次元データ生成部は、反射パルスに対してレンジ毎にDFTを行い、周波数ビン毎の周波数バンク信号を生成し、1スキャンにより取得される周波数バンク信号を、レンジと、方位角及び仰角と、相対速度とにより特定される4次元データへ変換する。予測部は、4次元データに基づいて予測4次元データを作成する。積分処理部は、4次元データと、前のスキャンに基づいて作成された予測4次元データとを積分する。目標検出部は、積分結果に基づいて目標を検出する。
(もっと読む)
レーダ装置
【課題】並走して走行する対向車を正確に検出することができないという問題が生じていた。
【解決手段】本発明のレーダ装置は、物標に対して電波を送信する送信アンテナ(14)と、物標からの反射波を受信する受信アンテナ(15)と、反射波に基づいて、自車両と同じ進行方向に向かって移動する先行車及び先行物標の位置を検出し、先行物標の位置が、先行車の位置を基準とした所定の先行車判定範囲内にある場合は、先行物標は先行車と同一と判定する先行車検出部(35)と、反射波に基づいて、自車両の進行方向と反対の方向に向かって移動する対向車及び対向物標の位置を検出し、対向物標の位置が、対向車の位置を基準とした所定の対向車判定範囲内にある場合には、対向物標は対向車と同一と判定する対向車検出部(36)と、を有し、対向車判定範囲は、先行車判定範囲よりも狭くなるように設定されることを特徴とするレーダ装置。
(もっと読む)
目標物検出装置及びプログラム
【課題】自車の周囲に複数の目標物が存在している場合でも、各目標物と自車との位置関係を容易に認識することができる目標物検出装置を提供する。
【解決手段】自車の位置を検出するGPS受信機8と、目標物の位置情報を記憶するデータベース19と、GPS受信機で検出された位置情報と、データベースに格納された目標物の位置情報とに基づき、表示対象の目標物を抽出する制御部18と、その制御部により抽出された目標物の位置情報と、自車位置情報とを表示する表示部5と、を備える。表示部には、複数の目標物の位置と車両の現在位置とが、2次平面上に配置されるターゲットアイコンにより報知するように構成した。
(もっと読む)
測位情報形成装置、検出装置、及び測位情報形成方法
【課題】物体検出精度を向上する測位情報形成装置、検出装置、及び測位情報形成方法を提供すること。
【解決手段】測位情報形成装置100において、合成部103が、カメラ距離マップ情報とレーダ距離マップ情報とを合成し、「合成マップ情報」を生成する。この合成マップ情報は、検出装置200において物体検出処理に用いられる。こうすることで、カメラ距離マップ情報とレーダ距離マップ情報とを合成した情報に基づいて物体検出することができるので、物体検出精度を向上することができる。すなわち、カメラ距離マップ情報とレーダ距離マップ情報とを合成することにより、地面又は壁面等からの反射による不要なノイズの除去が期待できるので、物体検出閾値を低く設定することができる。このため、従来では、検出不可能と判断された物体であっても、検出することができる。
(もっと読む)
クラッタ除去器、レーダ装置、クラッタ除去方法およびクラッタ除去用プログラム
【課題】物標とクラッタ源との相対速度差が小さいときにも十分にクラッタを抑圧することである。
【解決手段】ドップラシフト周波数推定部331aは、反射体からの複素受信信号I,Qに基づいて反射体のドップラシフト周波数を推定して、推定した値をドップラ推定値ωとする。擬似スペクトル生成部331bは、ドップラ推定値ωに対応する信号強度を複素受信信号I,Qに基づいて与えることにより、擬似スペクトルUを生成する。CFAR処理部332は、クラッタの抑圧処理を、擬似スペクトルUを用いて行なう。
(もっと読む)
レーダ装置
【課題】距離分解能以内に複数のターゲットが存在し、各ターゲットからの反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向推定精度を向上する。
【解決手段】レーダ送信部は、所定符号長のパルス圧縮符号を高周波送信信号に変換して送信アンテナから送信する。レーダ受信部は、複数の受信アンテナ毎にアンテナ系統処理部を有する。アンテナ系統処理部は、パルス圧縮符号におけるパルス送信レートの2倍のサンプリングレートで、受信信号をデジタルデータに変換し、奇数のサンプルタイミングに応じて変換されたデータとパルス圧縮符号との第1相関値を演算し、偶数のサンプルタイミングに応じて変換されたデータとパルス圧縮符号との第2相関値を演算する。レーダ受信部は、各第1相関値及び第2相関値に基づいて、高周波送信信号の距離分解能以内にターゲットが複数存在すると、各ターゲットを分離して検出する高分解能処理部を備える。
(もっと読む)
レーダ装置
【課題】
気象レーダ装置において、代表的なドップラ速度計算方式たるFFT法とPPP法は相反する性質を持つ。両手法を結合し、より精度の高いドップラ速度観測データを提供する。
【解決方法】
FFT法とPPP法によるドップラ速度並びに速度幅を同時に計算する。両手法によるドップラ速度の閾値に対する多寡を比較し、両者が共に閾値よりも大きい場合、有限項打ち切り誤差の影響による周波数分解能の劣化を受けないPPP法によるドップラ速度を採用する。一方、両手法によるドップラ速度の何れか一方が、前記閾値を下回る場合は、計算した速度幅の小さい方式によるドップラ速度計算結果を出力する。本手法により、より精度の高いドップラ速度観測データを提供する。
(もっと読む)
代表位置検出装置、表示装置、レーダ装置、代表位置検出方法及び代表位置検出プログラム
【課題】物標の位置を精度よく検出することができる代表位置検出装置、表示装置、レーダ装置、代表位置検出方法及び代表位置検出プログラムを提供する。
【解決手段】画像データ生成部21が物標で反射したエコー信号に基づいて生成した画像データに対して、領域設定部22は、画像データの各画素の輝度に基づいて、物標を含む検出領域を画像データに設定する。画素選択部23は、設定した検出領域を構成する画素から、輝度が高い順を複数選択し、代表点検出部24は、画素選択部23が選択した画素の位置に基づいて、代表位置を検出する。
(もっと読む)
距離測定装置および距離補正手段
【課題】第1の発受信手段と第2の発受信手段との間で、単一の無線周波数を用いて、時分割で相互間の通信を行い、相互間の距離を高精度で測定できる距離測定装置および距離補正手段を安価に実現する。
【解決手段】第1の発受信手段から少なくとも起点信号を含む無線信号を間欠発信し、第2の発受信手段で前記無線信号を受信すると、受信した無線信号から前記起点信号を復調しするとともに、伝達位相誤差もしくは伝達遅延誤差を検出して補正し、前記補正した起点信号と同期した距離測定信号を含む無線信号を時分割のタイミングで折返し発信し、前記第1の発受信手段において、前記第2の発受信手段から受信した距離測定信号を復調するとともに、伝達位相誤差もしくは伝達遅延誤差を検出して補正し、自局で生成した起点信号を基準として前記補正した距離測定信号の伝達位相もしくは伝達遅延を測定して、相互間の距離を高精度で算出する。
(もっと読む)
物体検出装置および物体の検出方法
【課題】レーダ装置の検知範囲に含まれている物体を、その物体の移動速度に関わらず検知する。
【解決手段】実施形態に係る物体検出装置は、送信部、受信部、移動物体検出部、および、微動物体検出部を備える。送信部は、レーダパルスを送信する。受信部は、物体からのレーダパルスの反射波を受信する。移動物体検出部は、受信部が第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出する。微動物体検出部は、第1の時間よりも長い第2の時間の間に、受信部が受信した受信信号を解析することにより移動物体に比べて移動量が微小な微動物体を検出する。
(もっと読む)
二次監視レーダ
【課題】オールコール期間にモードS応答の多重検出が発生した場合にも他の航空機の検出率の低下を防止する。
【解決手段】二次監視レーダは、捕捉機リスト記憶部と、指定機リスト記憶部と、送信手段と、判定手段と、更新手段とを備える。送信手段は、オールコール期間には一括質問を送信し、ロールコール期間にはロールコール捕捉機リストおよびロールコール指定機リストに登録される航空機に個別質問を送信する。判定手段は、一括質問に対して受信した応答に含まれるモードSアドレスがロールコール捕捉機リストに含まれているか否かを判定する。更新手段は、判定手段の結果により、当該航空機のモードSアドレスを追加して捕捉機リストを更新し、または、当該航空機のモードSアドレスを追加してロールコール指定機リストを更新する。
(もっと読む)
61 - 80 / 636
[ Back to top ]