
Fターム[5J070AJ13]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | ビデオメモリを持つもの (762)
Fターム[5J070AJ13]の下位に属するFターム
複数のビデオメモリ (126)
Fターム[5J070AJ13]に分類される特許
81 - 100 / 636
推定装置及びコンピュータプログラム及び推定方法
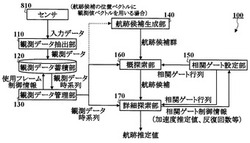
【課題】処理時間を低減しつつ目標航跡を精度良く抽出する。
【解決手段】航跡候補生成部140は、目標航跡を記述するパラメータのうちいくつかを固定した上でパラメータの候補を多数生成する。相関ゲート設定部150は、航跡候補生成部140が生成したパラメータ候補におけるいくつかの固定されたパラメータと目標の真のパラメータとの誤差を最大限考慮した相関ゲートを設定する。概探索部160は、航跡候補生成部140が生成したパラメータ候補と、観測データ管理部130が取り出した観測データとから、相関ゲート設定部150が設定した相関ゲートを用いてパラメータ候補の尤度を計算し、尤度が最大となるパラメータ候補を抽出する。詳細探索部170は、概探索部160が抽出したパラメータ候補を初期値として、尤度が大きくなる方向にパラメータを更新し、相関ゲートが小さくなるように更新して、尤度が最大となるパラメータを探索する。
(もっと読む)
識別装置

【課題】目標の識別精度を高くする。
【解決手段】実施形態の識別装置は、選択部、学習部、入力受付部、特徴抽出部、特徴量計算部、類似度計算部、識別部、及び出力制御部、を備える。選択部は、各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルから学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う。学習部は、選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、複数の識別基準を含む評価基準を生成する。入力受付部は、目標からのレーダエコーに基づく画像の入力を受け付ける。特徴抽出部は、画像から目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する。特徴量計算部は、評価基準を用いて特徴ベクトルの特徴量を計算する。類似度計算部は、特徴量と識別特徴量の類似度を計算する。識別部は、類似度を用いて目標を識別する。出力制御部は、識別結果を出力部に出力させる。
(もっと読む)
レーダ装置
【課題】クラッタ抑圧性能と目標信号保存性能を両立させる。
【解決手段】送受信アンテナを有する送受信回路1と、送受信回路1から入力される受信信号を入力して、その中のクラッタを抑圧する複数のFIRフィルタ2と、各FIRフィルタ2の出力信号をフーリエ変換する複数のFFT手段3と、FFT手段3の出力の中から、目標信号検出に使用するFFT出力結果を選択するFFT出力選択手段4と、FFT出力選択手段4の出力結果を用いて目標信号を検出する複数の目標検出手段5と、目標検出結果を表示する表示手段6と、FFT出力選択手段4でFFT出力結果を選択するために用いる切替周波数を記憶する切替周波数データベース7とを備え、FIRフィルタ2の振幅特性は全て互いに異なる。FFT出力選択手段4は、振幅利得の最も高いFIRフィルタ2の出力を用いるようにFFT手段3の出力を切り替える。
(もっと読む)
可変指向性アンテナ装置
【課題】周囲の壁の影響によらず、良好な指向性を得ることができる可変指向性アンテナ装置を提供する。
【解決手段】可変指向性アンテナで構成する方向探知装置の記憶部65に、各可変リアクタンス素子にそれぞれ対応したリアクタンス値からなるリアクタンス値セットを指向性毎に記憶し、且つ、指向性毎のリアクタンス値セットとして、背面に壁がある場合と背面に壁がない場合の2セットを記憶する。そして、可変リアクタンス制御部61は、背面方向に指向性を向けて、送信電力と受信電力との電力比を算出する。この電力比は、背面に壁がある場合には大きくなり、背面に壁がない場合には小さくなる。よって、電力比と閾値Xとを比較することで、背面の壁の有無を判断する。そして、判断結果に基づいて、記憶部65に記憶されている2セットのうちからいずれかを選択してリアクタンス値を設定する。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】スキャン相関によって物標のエコーが弱まることを防止する信号処理装置を提供する。
【解決手段】信号処理部17は、物標検出部16が物標を検知した地点に対応するスキャン相関後のエコー信号のレベルを調整する。具体的には、物標検出部16が物標を検知した各地点を中心としてガウス関数に基づく特性でレベル調整を行う。物標が検出された地点では、強いエコー信号が検出されていることになるため、その地点のエコー信号をレベル調整(強調)することで、高速で移動する物標のエコー信号がスキャン相関によって弱まったとしても、高いレベルで出力することができる。また、ガウス関数に基づく特性でレベル調整を行うため、ある地点だけ極端にエコー信号が強調されてしまうことを防止することができる。
(もっと読む)
通信測距複合システム、通信測距装置、親機および子機
【課題】通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことが可能な通信測距複合システム等を提供する。
【解決手段】通信測距複合システムでは、親機3が制御フレームの送信後(第1の送信時間α後)に第1のパルス信号を子機4に送信し、子機4が制御フレームの受信後(第2の送信時間β後)に第2のパルス信号を親機3に送信する。そして、親機3が第1のパルス信号の送信タイミングから第2のパルス信号の受信タイミングまでの時間(待機時間Tm)を算出し、子機4が第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミングまでの時間(応答時間Ts)を算出する。よって、制御フレームの送信及び受信タイミングを精確に検出する必要がなく、第1の送信時間αや第2の送信時間βにズレが生じても、パルス信号のエッジさえ検出できれば、待機時間Tmおよび応答時間Tsの算出に影響を与えずに済む。
(もっと読む)
エコー画像表示装置、エコー画像表示方法、およびエコー画像表示プログラム
【課題】表示する情報量を向上させたエコー画像表示装置を提供する。
【解決手段】制御部19は、表示部の表示領域の一部に設定された所定領域の分解能を変更する。分解能を変更するには、例えば、所定領域内における電磁波の所定方位あたりの発射回数を変更する手法がある。この場合、制御部19は、送信部10に対し、指定された拡大領域502に対応する方位について、所定時間あたりの送信信号の出力回数を増加させる指示を行う。仮にレーダ画面上の全ての領域の分解能を向上させると、データ量が増大することになるが、本実施形態では、分解能を向上させる領域を表示領域の一部に絞り込むことで、データ量を抑え、装置の負荷を低減する態様としている。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】信号処理によるミッシング対策を実現した信号処理装置を提供する。
【解決手段】スイープ間のレベル変化(例えば差分値)を検出し、基準パターンに照合してレベル変化パターンを出力する。スイープデータx(n)に対して、スイープデータx(n+1)が大きくなるパターン(パターンP)、スイープデータx(n)に対して、スイープデータx(n+1)が小さくなるパターン(パターンN)、それ以外のパターン(パターンZ)に分類する。ミッシング判定部153は、レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する。例えば、注目スイープデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンNであり、1つ後のスイープデータx(n+1)との変化パターンがパターンPである場合、ミッシングであると判定する。
(もっと読む)
レーダ装置
【課題】昇順および降順周波数シーケンスを用いて送受信された信号同士の複素乗算結果から2次元フーリエ変換を用いて目標相対速度を計測可能なレーダ装置を得る。
【解決手段】目標相対速度情報取得手段11と、送信波形諸元を生成する送信波形制御器1と、任意周波数発振器2と、90度ハイブリッド器7と、送信機3と、送信機3からの信号を目標に照射して反射された信号を受信するアンテナ4と、分配器5と、位相検波器6a、6bと、低域通過フィルタ8a、8bと、A/D変換器9a、9bと、ビデオ信号記憶手段10と、目標相対速度Vdを用いて信号を補正する相対速度補正処理器12と、合成帯域処理器13と、目標距離Rを計測する目標検出処理器14とを備える。
(もっと読む)
多目標追尾装置
【課題】誤警報等の不要信号が発生する環境下で、信号強度が弱い場合でも、運動が変化する目標の航跡の確立を早期に行うことができるとともに、演算負荷を軽減させることができる多目標追尾装置を提供する。
【解決手段】多目標追尾装置100は、センサとしてのレーダ10から観測値の信号を受ける。多目標追尾装置100は、観測値蓄積部1と、2次元相関決定追尾処理部2と、航跡確立判定部3と、不確定領域判定部4と、多次元相関決定追尾処理部5と、多次元サンプリング数制御部6とを有している。多目標追尾装置100は、全観測領域の観測値を用いて2次元相関決定追尾処理を行い、目標の有無が確定しない領域のみで、その領域で得られる観測値に対して多次元相関決定追尾処理を適用する。
(もっと読む)
物標探知方法、物標探知プログラム、物標探知装置、およびレーダ装置
【課題】レインクラッタ等のランダム性の高いクラッタを、正確且つ効果的に抑圧できる物標探知方法を実現する。
【解決手段】対象の極座標位置を含む所定範囲の探知データ値を取得する(S101)。方位方向に隣り合う探知データ値の差を算出して、値の変動を検出し(S102)、設定対象の極座標位置に対する変動カウントCnvを算出する(S103)。変動カウントCnvが閾値Thよりも高ければ(S104:Yes)、設定対象の極座標位置のマスク画像データ値を最高値に設定する(S105)。変動カウントCnvが閾値Th以下であれば(S104:No)、設定対象の極座標位置のマスク画像データ値を最低値に設定する(S108)。マスク画像データの平滑化処理を行い(S106)、探知データ値から平滑化処理後のマスク画像データ値を減算する(S107)。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法及び信号特定プログラム
【課題】入力信号から不要な信号を除いて、物標での反射によるエコー信号を検出する信号処理装置、レーダ装置、信号処理方法及び信号特定プログラムを提供する。
【解決手段】物標での反射によるエコー信号を受信信号から検出する信号処理装置において、信号レベル検出部21で入力信号の信号レベルを検出し、立ち上がり検出部22で入力信号におけるエコー信号の立ち上がりを検出する。検出した立ち上がりの開始時以降における信号の信号レベルの最大値を閾値決定部25で特定する。特定した最大値に基づいて、エコー信号検出部26で物標での反射によるエコー信号を検出する。
(もっと読む)
レーダ装置、注目物標検出方法及び注目物標検出プログラム
【課題】画像データから特定の注目物標の検出を精度よく行うことを可能にするレーダ装置、注目物標検出方法及び注目物標検出プログラムを提供する。
【解決手段】記憶部14に、鳥エコー信号の特性に基づいて生成された鳥のテンプレート画像データ14Bを記憶する。画像処理部133は、受信したエコー信号に基づいて生成した入力画像データと、記憶部14に記憶されたテンプレート画像データ14Bとのパターンマッチングを行い、入力画像データから鳥が含まれた領域を抽出する。
(もっと読む)
レーダ装置
【課題】JEMを伴う場合の目標相対速度を正しく算出し性能向上を図ったレーダ装置。
【解決手段】送受信手段で受信された時間領域の受信信号を周波数領域に変換する周波数領域変換手段と、周波数領域変換手段で変換された周波数領域の受信信号における信号強度に基づく演算処理を行い目標候補を検出するとともに目標候補の相対速度を算出する目標候補検出手段と、目標候補検出手段で検出された目標候補の相対速度に基づきJEM間隔を算出するJEM間隔算出手段と、JEM間隔算出手段で算出された異なる時刻のJEM間隔に基づき目標の運動を判定する目標運動判定手段と、目標候補検出手段で算出された異なる時刻の目標候補の相対速度に基づき目標候補の加速度を算出する目標候補加速度算出手段と、目標運動判定手段の目標運動判定結果と目標候補加速度算出手段の目標候補の加速度に基づき目標および目標の目標相対速度を判定する目標判定手段とを含む。
(もっと読む)
移動目標対応型スキャン相関方法
【目的】本発明は、レーダ、超音波、光学カメラ装置に関し、従来のスキャン相関処理の欠点である移動ターゲット信号をクラッタ同様に抑圧してしまう問題を解決するとともに、クラッタのみをより積極的に抑圧し、ターゲットの識別能力を向上させることを目的とする。
【構成】信号受信部より逐次出力されるビデオ信号をスキャン毎記憶する受信映像メモリと、前記受信映像メモリに記憶された複数のスキャン画像を小区画領域に分割し、その領域内に存在するターゲットの移動ベクトルを算出する移動ベクトル算出部と、前記小区画領域内にターゲットが存在する可能性を示す指標を算出するターゲット指標算出部と、前記小領域領域内のクラッタレベルを算出するクラッタレベル算出部と、前記、ターゲット指標、移動ベクトル、クラッタレベル情報を入力とするスキャン相関処理部と、前記スキャン相関処理結果を表示する表示部とを有する。
(もっと読む)
地中レーダ
【課題】地中の埋設物を探知する地中レーダにおいて、路面上等に埋設物の埋設位置を容易に表示可能にする。
【解決手段】電磁波を送出する電磁波送信部5とこの電磁波の反射波を受信する電磁波受信部6とを備えたレーダ本体2を有し、電磁波受信部5からの受信波データAにより埋設物を探知する地中レーダ1において、レーダ本体2の移動位置を測定する位置測定部3と、レーダ本体2を移動させて埋設物を探知する際の受信波データAと受信波データA取得時に位置測定部3で得られるレーダ本体2の位置データBとに基づいて定まる埋設物の埋設位置データCを記憶する記憶部8と、再度、レーダ本体2を移動させた時に、当該移動の際に位置測定部3で得られるレーダ本体2の位置データBと記憶部8に既に記憶されている埋設位置データCとに基づいて埋設物11の埋設位置を表示する表示部4とを備える。
(もっと読む)
レーダ装置
【課題】従来のESPRIT法における信号の処理時間は非常に長いという問題があった。
【解決手段】本発明のレーダ装置は、複数の受信アンテナを用いて受信した物標からの反射波に基づいて信号ベクトルを生成する信号ベクトル生成部と、信号ベクトルに基づいて部分行列を生成する部分行列生成部と、部分行列から正則行列を算出する正則行列演算部と、正則行列の固有値を算出する固有値演算部と、固有値から物標が存在する角度を算出する角度算出部と、を有することを特徴とする。
(もっと読む)
レーダ装置、車両制御システム、信号処理装置、及び、物体検出方法
【課題】物体の位置を正確に検出する技術を提供する。
【解決手段】ビート信号に基づいて、ビート信号に含まれる波の周波数及び信号レベルを示すピーク信号を導出する。そして、ピーク信号の下端となる第1周波数と上端となる第2周波数との間を互いに異なる補正率が設定された複数のパートに区分し、複数のパートのうちピーク信号が属するパートの補正率でピーク信号を補正し、補正されたピーク信号に基づいて、物体の位置を検出する。また、ピーク信号の第1周波数及び第2周波数の近傍においては、第1周波数及び第2周波数の中央の近傍よりも、一つのパートとする周波数の幅を狭くする。これにより、第1周波数及び第2周波数近傍のピーク信号の補正を細分化して行うことができ、物体の位置を正確に検出できる。
(もっと読む)
異常検出装置、および異常検出プログラム
【課題】障害物検出装置の異常を検出する異常検出装置において、簡素な処理で異常検出装置の異常を検出できるようにする。
【解決手段】レーダセンサにおいて信号処理部は、自車両の相対移動ベクトルと今回の処理開始までに求められた中心軸の方向とがなす角である偏向量を検出し、この偏向量が0に近づくように中心軸の方向を補正する。そして、この補正後の中心軸の方向を利用して、再度、偏向量を検出し、この偏向量がさらに0に近づくように中心軸の方向を補正する。このような処理を繰り返すことで、偏向量を段階的に0に収束させる。この構成において、偏向量の変化パターンが予め設定された基準パターンから逸脱する場合にレーダセンサに異常があると判定する(S210〜S230)。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】分解能メッシュと、地域メッシュの重なる面積に応じて地域メッシュの目標物の数量を求め、目標物の数量の管理を向上させる目標物管理装置および目標物管理方法を提供する
【解決手段】目標物が所在しているか否かを検出し、目標物が所在するときは分解能メッシュ各々における目標物の数量を求める検出部と、目標物が所在する第1のメッシュと重なる、監視対象範囲を予め設定した一定の領域で分割した範囲である第2のメッシュを抽出し、抽出された第2のメッシュと重なる目標物が所在する第1のメッシュの目標物の数量を分配し、抽出された第2のメッシュに関連付ける分配部と、地域メッシュ各々に分配された目標物の数量の総和を、地域メッシュ各々で求める算出部と、を備える目標物管理装置である。
(もっと読む)
81 - 100 / 636
[ Back to top ]