
Fターム[5J070AJ13]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | ビデオメモリを持つもの (762)
Fターム[5J070AJ13]の下位に属するFターム
複数のビデオメモリ (126)
Fターム[5J070AJ13]に分類される特許
101 - 120 / 636
目標物管理装置および目標物管理方法
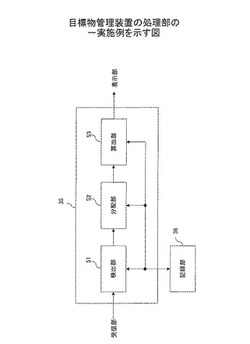
【課題】分解能メッシュと、地域メッシュの重なる面積に応じて地域メッシュの目標物の数量を求め、目標物の数量の管理を向上させる目標物管理装置および目標物管理方法を提供する
【解決手段】目標物が所在しているか否かを検出し、目標物が所在するときは分解能メッシュ各々における目標物の数量を求める検出部と、目標物が所在する第1のメッシュと重なる、監視対象範囲を予め設定した一定の領域で分割した範囲である第2のメッシュを抽出し、抽出された第2のメッシュと重なる目標物が所在する第1のメッシュの目標物の数量を分配し、抽出された第2のメッシュに関連付ける分配部と、地域メッシュ各々に分配された目標物の数量の総和を、地域メッシュ各々で求める算出部と、を備える目標物管理装置である。
(もっと読む)
無線タグ距離算出システムおよび無線タグリーダ

【課題】無線タグの電池消耗を抑制しつつ、複数の無線タグリーダが無線タグとの間の距離をそれぞれ算出することができる無線タグ距離算出システムを提供する。
【解決手段】無線タグリーダ1Aは、タグコマンドの送信完了時点t3から、無線タグ2から送信されるACKの受信完了時点t10まで時間TAを計測し、計測した時間TAをブロードキャスト送信する。無線タグリーダ1Bは、タグコマンドおよびACKを受信(傍受)して、タグコマンドの受信完了時点t4からACKの受信完了時点t11までの時間TBを計測し、また、無線タグリーダ1Aから送信される時間データ(TA)を受信する。これら時間TA、TBと、予め記憶しているTtag、Tres、無線タグリーダ1Aと無線タグリーダ1Bとの間の距離D3とを用いて、無線タグリーダ1Bは、無線タグ2との間の距離D2を算出する。よって、無線タグ2と通信を行うことなく距離D2を算出できる。
(もっと読む)
複合誘導装置及び複合誘導方法
【課題】広い周波数帯でのインターフェロメータでの測角処理を短時間で効率良く行い得る。
【解決手段】飛しょう体における略円筒筐体となるレドーム先端の円形領域の中央に配置され、レドームを通じて飛しょう体正面方向からの電波を受信する第1のパッシブアンテナ素子群と、レドームの側面に周面に沿って配置され、第1のパッシブアンテナ素子群の観測測角範囲より広角の電波を受信する第2のパッシブアンテナ素子群と、観測する周波数帯に応じて第1のパッシブアンテナ素子群のうち配列間隔が異なる複数の素子を選択し、これら選択した複数の素子それぞれの受信信号及び第2のパッシブアンテナ素子群のうち任意の素子の受信信号を用いて目標方向の方位角及び高低角のうちの少なくとも1つを粗測角演算するパッシブ信号処理部と、パッシブ信号処理部で得られる粗測角演算結果に基づいて飛しょう体を目標方向に誘導する誘導手段とを備えた複合誘導装置を提供できる。
(もっと読む)
情報読取装置及びプログラム
【課題】複数の物品の配置順どおりに読み取りを行った場合に、全体に対してどの辺りに不具合が起きているかを適切に明示できるようにする。
【解決手段】制御部1は、複数の商品の個々から商品識別情報をRFID・R/W部7によって逐次読み取ると共に、その読取タイミングを検出して、商品識別情報及び読取タイミングを読取情報メモリM4に記憶させた後、在庫情報記憶部M2の内容と読取情報メモリM4の内容との比較結果に基づいて、商品毎に正常な読み取りが行われたか否かを判別し、全体に対してどの辺りに不具合が起きているかを適切に明示する。
(もっと読む)
無線周波数識別タグ位置測定方法及び装置
【課題】無線周波数識別RFIDタグ位置測定方法及び装置を提供する。
【解決手段】方法は、コンピュータが、RFIDリーダのアンテナを使用して複数の指定発射電力毎に線形配列となる対象タグを所定回数読み取り、各対象タグについて指定発射電力毎のアンテナによる読取が成功した回数を記録し、各対象タグについてのアンテナによる読取成功回数の合計を算出し、各対象タグ毎の読取成功回数の合計に対してソートすることにより各対象タグのアンテナに対する配列順序を特定し、各対象タグ毎のアンテナに対する正規化の読取確率を算出し、各対象タグ毎のアンテナに対する正規化の読取確率に基づいて、タグのアンテナに対する正規化の読取確率とタグのアンテナに対する距離との対応関係が記録される読取確率マップを検索することにより、各対象タグ毎の前記アンテナに対する距離を特定することを特徴とする。
(もっと読む)
ボール計測装置およびボール計測方法
【課題】ゴルフボール等のボールの速度、スピン量を容易に計測することができるボール計測装置およびボール計測方法を提供する。
【解決手段】電波反射性を有する第1領域と電波反射率が第1領域よりも低い第2領域とを有するボールに向けて、指向性アンテナで構成されるアンテナにより供給される送信信号に基づいて送信波を送信するとともにボールで反射された反射波をアンテナで受信し、このアンテナで生成された受信信号に基づいてドップラー周波数を有するドップラー信号を作成する工程と、ドップラー信号を周波数解析することにより周波数ごとの信号強度の分布を示す信号強度分布データを作成する工程と、信号強度分布データに基づいてボールの移動速度を算出するとともに前記ボールのスピン量を算出する工程とを有する。ドップラー信号を周波数解析する際に全解析データ数のうち、少なくとも20%のデータにドップラー信号を用い残りのデータを0とする。
(もっと読む)
ボール計測装置
【課題】簡素な構成で球技用ボールの挙動を表わすさまざまなデータを的確に計測することができるボール計測装置およびボール計測方法を提供する。
【解決手段】アンテナ12およびドップラーセンサ14を用いて計測したドップラー信号Sdの信号強度分布データPを得ると共に、予め実測され得られている演算用速度V0と移動速度Vαとの相関関係に基づいて、信号強度分布データPから算出される演算用速度V0から移動速度Vαを算出し、予め実測され得られている信号強度分布データPとスピン量SPとの相関関係に基づいて、信号強度分布データPからスピン量SPを算出する。
(もっと読む)
船舶探知装置、船舶探知プログラムおよび船舶探知装置の船舶探知方法
【課題】レーダ観測により得られた画像データに基づいて船舶を高い精度で探知できるようにすることを目的とする。
【解決手段】CFAR方式演算部120は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶推定領域としてCFAR方式で特定する。ウエーキ方式演算部121は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶特定領域としてウエーキ方式で特定する。SC比マップ生成部130は、偏波組み合わせ毎に、船舶候補領域(船舶推定領域、船舶特定領域の一部)にSC比(海面散乱波の推定強度に対する船舶散乱波の推定強度)を設定してSC比マップ197を生成する。SC比合算マップ生成部140は、偏波組み合わせが異なる複数のSC比マップ197a〜Nを合算してSC比合算マップ198を生成する。船舶探知部150は、SC比合算マップ198に基づいて船舶領域を特定する。
(もっと読む)
速度推定装置及びコンピュータプログラム及び速度推定方法
【課題】合成開口レーダによって観測された観測対象の速度を正しく推定する。
【解決手段】圧縮観測算出部(アジマス圧縮部120)は、複数の推定速度それぞれについて、上記受信信号から生成された所定のサンプリング間隔を有する一連の観測値と、上記推定速度に対応する参照信号との間の相関を取ることにより、上記所定のサンプリング間隔よりも短いサンプリング間隔を有する一連の圧縮観測値を算出する。ピーク抽出部141は、上記複数の推定速度それぞれについて、上記圧縮観測算出部が算出した一連の圧縮観測値のピークを抽出する。速度推定部151は、上記複数の推定速度のなかから、上記ピーク抽出部141が抽出したピークが極大となる推定速度を求めて、上記観測対象の推定速度とする。
(もっと読む)
画像識別装置および検出装置
【課題】
目標の両端部分の一部が欠落している時系列画像であっても、目標の識別及び検出を自動で行う装置を提供する。
【解決手段】
目標からのレーダエコーを処理してフレーム単位で生成される時系列画像を用いて前記目標の識別を行う画像識別装置であって、レーダエコーを処理して生成される画像を取得する取得部と、
前記画像に含まれる輝度値の変化率から算出される主軸を用いて前記目標の両端候補を抽出する抽出部と、前記画像と前記両端候補を用いて、予め保持している辞書との類似度を算出する算出部と、前記両端候補毎に得られる前記類似度から目標の識別を行う識別部と、前記識別部の結果を出力する出力部とを具備する。
(もっと読む)
目標物速度特定装置、目標物速度特定プログラム及び目標物速度特定方法
【課題】少ない計算量で高精度に目標物の速度を特定することを目的とする。
【解決手段】刻み幅特定部3は、SAR搭載機の速度vpと距離R0と電波の波長λと合成開口時間τと目標物のアジマス方向の予測速度va’とを用いて表された振幅値V0vazの関数に、SAR画像データの観測条件であるSAR搭載機の速度vpと距離R0と電波の波長λと合成開口時間τとを入力し、予測速度va’に対応する振幅値V0vazを計算する。刻み幅特定部3は、振幅値V0vazが所定の値以上になるアジマス方向の予測速度va’の範囲を処理装置により特定し、特定した範囲の幅以下の幅を刻み幅Δva1とする。そして、特定処理実行部は、刻み幅Δva1を用いて、目標物のアジマス方向の速度を処理装置により特定する。
(もっと読む)
時空間適応処理を用いてレーダー信号におけるターゲットを検出する方法
【課題】方法は、時空間適応処理を用いてレーダー信号におけるターゲットを検出する。
【解決手段】検定統計量は、
【数1】
である。ここでx0はテスト信号であり、xkはK個のトレーニング信号であり、αはテスト信号内のターゲット信号の未知の振幅であり、λはスケール係数であり、Rはトレーニング信号の共分散行列であり、関数maxは最大値を返す。検定統計量は、閾値と比較され、ターゲットが存在するか否かが判断される。
(もっと読む)
部材の位置管理システム及び部材の位置管理方法
【課題】ある部材(特定部材)の位置の特定を行うときに、特定部材の周辺に位置していて特定部材とは異なる他の部材の位置情報を利用することによって、特定部材の位置の管理を行い易くする。
【解決手段】本発明に係る部材の位置管理システム1は、部材IDが記録されたRFIDタグ3と、タグリーダ4と、位置情報データベース5と、この位置情報データベース5を用いて部材2の位置を決定する位置決定手段6とを備えている。タグリーダ4は、位置を特定しようとする部材2である特定部材2aの部材IDと、特定部材2aの周辺に位置していて特定部材2aとは異なる他の部材2bの部材IDとを同時又は異時に取得するように構成されている。位置決定手段6は、タグリーダ4で取得した他の部材2bの部材IDと位置情報データベース5とに基づいて、他の部材2bの位置情報を求め、求めた他の部材2bの位置情報を特定部材2aの位置情報として適用する。
(もっと読む)
半導体集積回路およびその動作方法
【課題】車載用ミリ波レーダ装置に搭載されA/D変換器とMPUを内蔵する半導体集積回路で、内蔵A/D変換器のチップ占有面積を削減して、内蔵A/D変換器の分解能を改善する。
【解決手段】半導体集積回路で、レーダ装置の複数の受信信号は、単一のデジタル補正型A/D変換器によってA/D変換される。単一のA/D変換器のデジタル補正型A/D変換器は、受信インターフェース1のマルチプレクサから出力される複数の受信信号を順次にA/D変換するフォアグラウンドデジタル補正型A/D変換器2、3、4、5である。単一のA/D変換器は、従属接続された複数の変換器MDAC1…Nを有するパイプライン型A/D変換器2を含む。半導体集積回路は、デジタル補正のための補正用信号生成部3とデジタル補正用D/A変換器4とデジタル補正部5を具備する。
(もっと読む)
ミリ波撮像装置
【課題】パッシブ型のミリ波撮像装置において、撮像時の反射板の駆動の影響を受けることなく画像を安定して撮像でき、しかも、その撮像画像から、人の足部に隠された物体を正確に検出できるようにする。
【解決手段】被写体2となる人体から放射されるミリ波帯の熱雑音を受信することで、被写体2の画像を撮像するミリ波撮像装置において、被写体2から放射されたミリ波帯の熱雑音をラインセンサ12に入射させる経路を、ケース20に設けられた開口部22、反射板16、及びレンズ14にて構成し、しかも、開口部22と反射板16は、ケース20の下方に配置し、ラインセンサ12は、レンズ14を挟んで、ケース20の上方に配置する。この結果、撮像時に装置全体が大きく振動して被写体2の撮像精度が低下するのを防止でき、しかも、被写体2の足部に隠された物体を良好に検知できるようになる。
(もっと読む)
航行援助装置
【目的】
本発明は、船舶で航行中に危険物標や他船舶が自船予想針路上に出現または横断する可能性が発生した場合、ARPA(自動衝突予防援助装置)やAIS(自動船舶識別装置)などの装置を通じてレーダより得た危険物標の情報や他船の位置・針路ベクトルなどの情報を取り込み、予想針路との最接近距離と到達時間であるCPA・TCPAを計算し危険シンボルを表示する方法及び装置に関し、予想された針路が安全かどうかを知らせることを目的とする。
【構成】レーダ空中線部より得られた探知物標画像、及び自船情報と他船情報と予想針路情報を用いて演算部にて各予想針路位置におけるCPA・TCPAの演算を行ない、前記演算の結果からアラーム判定を行ない判定の結果に応じた危険シンボルを表示部へ画面表示させる。
(もっと読む)
チャープ信号生成回路、FMCW方式合成開口レーダ、アンテナ装置及び飛翔体
【課題】マイクロ波広帯域チャープ信号生成を低コストで実現することにある。
【解決手段】基準信号生成部(DDS72)と、位相同期ループ(PLL74)とを備える。基準信号生成部は、水晶発振器(80)で発生させた信号から線形チャープ信号の基準信号を演算し、この基準信号から高周波成分を除去する。前記位相同期ループは、前記基準信号生成部で生成した前記基準信号を受け、中心周波数、周波数傾き及び繰り返し周期をパラメータに用いて線形チャープ信号を生成する。
(もっと読む)
レーダ装置及びコンピュータプログラム
【課題】アンテナの指向性制御によらずに、検知した対象物が上方構造物であるか否か判別する。
【解決手段】電波を送信する送信アンテナ3と、送信された電波が対象物により反射された電波を受信する受信アンテナ1nと、受信された電波を所定の時間間隔で取得する受信波取得部7と、受信波取得部7の取得回数の関数として、受信された電波の電力を算出する受信電力算出部22と、関数から複数の代表点を抽出する代表点抽出部28と、代表点に基づいて対象物を前記受信アンテナの光軸より高い位置にある上方構造物であるか否か判定する判定処理部29と、を備える。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる信号処理装置を提供する。
【解決手段】空間フィルタ172は、例えば鮮鋭化フィルタ等からなり、複数の過去のエコー信号を画像メモリ16から読み出し、注目サンプルの鮮鋭化を行う。例えば、注目サンプルy’(i,j)を囲む8画素のエコー信号を含む9画素についてのエコー信号を画像メモリ16から読み出し、鮮鋭化処理を行う。そして、相関処理部17は、画像データ生成部15から入力された最新のデータと、空間フィルタ処理後の過去のデータと、の重み付け加算を行う。
(もっと読む)
画像表示装置
【課題】高輝度のノイズがHDR画像に含まれている場合や、様々な観測対象物がHDR画像の中に混在している場合でも、それぞれの観測対象物を分かり易く表示することができるようにする。
【解決手段】HDR画像を構成している画素のうち、隣り合う画素と輝度が近似している画素同士を同一のグループに分類し、同一のグループに属する画素が存在している領域を輝度変換対象領域(1)〜(N)に設定する輝度変換対象領域設定部3と、輝度変換対象領域(1)〜(N)内に存在しているノイズを除去してから、輝度変換対象領域(1)〜(N)内に存在している画素の輝度を可視範囲内の輝度に変換する輝度変換部4とを設ける。
(もっと読む)
101 - 120 / 636
[ Back to top ]