
Fターム[5J070AJ13]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | ビデオメモリを持つもの (762)
Fターム[5J070AJ13]の下位に属するFターム
複数のビデオメモリ (126)
Fターム[5J070AJ13]に分類される特許
141 - 160 / 636
レーダ装置及びコンピュータプログラム
【課題】側方対象物の誤検知を防ぐことができるレーダ装置を提供する。
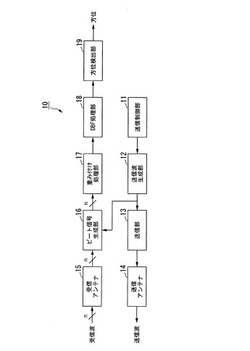
【解決手段】電波を送信する送信アンテナ14と、送信された電波が対象物により反射された電波を受信する複数の受信アンテナ15と、受信アンテナ15で受信された各受信信号と送信アンテナ14で送信した送信信号とを混合して受信アンテナ15毎にビート信号を生成するビート信号生成部と、各ビート信号の信号強度に、受信アンテナ15毎に関係付けられた所定の重みをかけ、ビート信号の信号強度を変更する重み付け処理部17と、重み付け処理部17により信号強度が変更されたビート信号に基づいて、対象物の方位を検出する方位検出部19と、を備える。
(もっと読む)
観測装置および観測対象推定装置

【課題】移動を伴う多観測角観測装置を用いて被観測体の推定精度を向上させることを目的とする。
【解決手段】多観測角観測装置100はコニカルスキャン方式の移動を伴う観測装置である。多観測角観測装置100は観測角が異なる第一アンテナ131〜第四アンテナ134を備える。観測角が小さいアンテナほど下側に設置し、観測角が大きいアンテナほど上側に設置する。また、設置位置が下であるアンテナほど支持棒の長さを短くし、設置位置が上であるアンテナほど支持棒の長さを長くする。制御装置110は第一回転軸121〜第四回転軸124を第一アンテナ131〜第四アンテナ134それぞれの観測角に応じて異なる速度で回転させる。制御装置110は第一アンテナ131〜第四アンテナ134で受信した観測角が異なる複数の観測信号に基づいて被観測体を推定する。
(もっと読む)
検知装置および検知プログラム
【課題】定常的に存在している物体の近傍に位置する対象物の検知精度を向上する。
【解決手段】検知装置は、レーダを用いて移動可能な対象物を検知する。検知装置は、取得部、背景算出部、および、判定部を備える。取得部は、レーダが検知物体から受信した受信電力値を取得する。背景算出部は、繰り返し同じ位置に検知される検知物体を表す背景物体からレーダが受信する背景電力値の強度の分布を算出する。判定部は、受信電力値の強度の分布が背景電力値の強度の分布と異なる場合、レーダは対象物を検知したと判定する。
(もっと読む)
目標検出装置及び目標検出方法
【課題】目標検出の誤警報の低減を図り得るレーダ装置の目標検出装置を提供する。
【解決手段】目標検出部において、事前に受信ビデオ信号からクラッタの分布を形状パラメータ及びスレッショルド算出処理部162にて推定し、さらに擬似的な目標を示すテストセルを含めた形状ペラメータに対応するスレッショルドをレーダの1スキャンごとにスレッショルドメモリ163に記憶しておき、検出判定部165により、このスレッショルドメモリ163に記憶されたスレッショルドを利用して、ワイブルCFAR処理部164による処理から目標を検出するようにしている。
(もっと読む)
監視システム
【課題】監視エリア内に存在する物体をより精度高く検出でき、かつ無線通信媒体を有する物体については各物体の具体的内容をより正確に把握し得る監視システムを提供する。
【解決手段】監視システム1は、レーザセンサ100と無線タグリーダ10とを備えており、レーザセンサ100には、レーザ光走査手段と、レーザ光が物体にて反射した反射光を受光する受光手段と、受光手段による受光結果に基づいて物体の方位を検出する検出手段とが設けられている。また、無線タグリーダ10には、可変指向性アンテナ14と、可変指向性アンテナ14の指向性を制御する指向性制御手段と、可変指向性アンテナ14を介して送受信される電波を媒介として無線通信媒体と無線通信を行う無線通信手段とが設けられている。そして、指向性制御手段は、レーザセンサ100での物体の検出結果に基づいて可変指向性アンテナ14の指向性を制御している。
(もっと読む)
距離測定装置及び飛翔体位置測定装置
【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 レーザー距離計10の接眼レンズ11にリレーレンズ20を介してビデオカメラ30を装着した構成であり、レーザー距離計10の接眼レンズ11に表示される飛翔体の画像をビデオカメラ30のモニタ画面31に表示させることができる。従って、観測者は、レーザー距離計10の接眼レンズ11をのぞき込み、アイポイント位置を保ちながらレーザーを照射する必要はなく、ビデオカメラ30のモニタ画面31を見ながら、レーザー距離計10を操作して飛翔体を追尾でき、飛翔体を追尾しながらのレーザー照射作業が容易となる。
(もっと読む)
画像レーダ装置
【課題】従来、観測目標と一致する候補目標の3次元形状データや観測目標種類が不明の場合、クロスレンジ軸ベクトルの推定ができず、また、クロスレンジ軸ベクトルが一意に定まらず複数種類得られてしまう。
【解決手段】受信高周波信号の目標上の反射強度分布に関するレンジ方向と、クロスレンジ方向を共に高分解能化処理して生成されたレーダ画像上の主軸と高さ軸又は/及び横軸のレーダ画像における夫々の軸の傾きを全軸傾斜計測手段で算出し、画像レーダ装置から目標に向かう方向のレンジ軸単位ベクトルと主軸方向単位ベクトルと目標の高さ軸方向又は/及び目標の横軸方向の単位ベクトルを全軸方向推定手段で得て、レンジ軸単位ベクトルと主軸方向単位ベクトルと目標の高さ軸方向又は/及び目標の横軸方向の単位ベクトルと、レーダ画像上の主軸と高さ軸又は/及び横軸の傾きからクロスレンジ軸ベクトルを推定する。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】コヒーレント積分を行う場合において、干渉成分による影響を軽減した信号処理装置を提供する。
【解決手段】ソート処理部153は、振幅値に応じてデータ列を並び替える処理を行う。閾値検出部154は、ソート処理部153によって並び替えられたデータ列の中から、振幅値の小さい順に複数点のデータを選択する。そして、閾値検出部154は、選択したデータの平均値を算出し、この平均値に所定の係数αを掛けた値を閾値として算出する。ゼロ置換処理部151は、閾値検出部154から入力された閾値と、各データの振幅値とを比較する。閾値以上の振幅値を示すデータが存在した場合、そのデータ(スイープメモリ13から入力した複素信号)を0に置換し、コヒーレント積分処理部161に出力する。閾値未満の振幅値を示すデータは、スイープメモリ13から入力した複素信号をそのままコヒーレント積分処理部161に出力する。
(もっと読む)
トイレ装置
【課題】ドップラーセンサーを用いて対象物の検知を行う際に、より簡素な構成で且つ確実に誤検知を防止できるトイレ装置を提供すること。
【解決手段】このトイレ装置としての小便器洗浄装置は、受信部12が送信期間以外においても受信動作を行ってドップラー信号を対象物検知部24に出力する干渉検知処理と、その出力されたドップラー信号が、他のトイレ装置から送信された電波による影響を受けた信号であると判断した場合には、その影響を受けた信号と干渉しないタイミングとなるように、電波送信タイミングを調整する調整信号をドップラーセンサー部DSに出力する干渉調整処理と、その調整信号で調整された電波送信タイミングに送信期間をシフトさせるシフト処理と、を実行し、検知動作は、このシフトされた送信期間を基準とし動作間隔期間をおいて継続的に複数回実行される。
(もっと読む)
自動車用レーダ・システムおよび方法
【課題】 アンテナ・ビームの各々における距離ゲートを変化させることによって、検出ゾーンのカバレッジを可変とする。
【解決手段】 レーダ検出プロセスは、FFT出力信号の導関数を計算し、指定検出ゾーン内において物体を検出することを含む。一実施形態では、FFT出力信号の二次導関数におけるゼロ交差が物体の存在を示す。物体の距離は、ゼロ交差が発生した周波数の関数として判定する。また、各レーダ・ビームおよび処理サイクルにおいて物体の有無を示す指標を収容した検出表についても記載する。このような指標を少なくとも2つ組み合わせて、検出ゾーンにおける物体の有無を検出する。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】送信パルス幅が変動した場合においても適切なフィルタ処理を行うことができる信号処理装置を提供する。
【解決手段】CPU23のフィルタ係数演算部232は、送信パルス幅検出器22が検出した送信パルス幅、および局発周波数制御部231が検出したIF信号の中心周波数に基づいてデジタルフィルタ19のフィルタ係数を演算し、設定する。信号抽出部17は、CPU23のフィルタ係数の演算、設定が終了すると、メモリ18に記憶しておいたIF信号(デジタル信号)をデジタルフィルタ19に出力する。
(もっと読む)
SARデータ処理方法及びSARデータ処理システム
【課題】山岳地域のような地形歪みがある地域におけるバイオマス量の推定を可能とする。
【解決手段】地上の標高に係るDEMデータからSARシミュレーション画像データを作成する(S104)。作成されたSARシミュレーション画像データを、SAR画像データに一致させるようにパラメータを選択する(S106)。一致させたSARシミュレーション画像データとSAR画像データとに基づいて、SAR画像データの地形歪み量を算出する(S107)。SARシミュレーション画像データとSAR画像データとに基づいて、SAR画像データの散乱強度を算出する(S108)。SAR画像データに対し、地形歪み量補正及び散乱強度補正を施し、地形歪みがある地域におけるバイオマス量の推定を行う。
(もっと読む)
鳥獣追跡システム
【課題】電力消費を最小限に抑えつつ、鳥獣の生息環境の即時的な把握が可能な鳥獣追跡システムを提供する。
【解決手段】鳥獣追跡システムは、鳥獣2に装着可能な鳥獣タグ3と、複数の基地局1a,1bと、データセンタ6とを備える。鳥獣タグと基地局とは、夫々の時刻取得装置に基づきビーコンの周期的な送受信の同期を取る。鳥獣タグは、いずれの基地局とも通信圏外にあるときは無線機によるビーコン受信を停止し、動き感知センサが鳥獣の静止状態を検知したときは、GPSセンサによるデータ取得周期を延長させる。また、データ取得時のみ、最小時間、GPSセンサを起動させる。なお、鳥獣タグが通信圏外にあり、かつ、鳥獣タグメモリが満杯であるときは、保存された位置データを時間均等に間引くとともに、GPSセンサによるデータ取得周期も間引間隔に併せて延長させることが好ましい。
(もっと読む)
物体認識装置
【課題】車両と認識対象である物体との距離が変化しても、車載レーダの反射の検出パターンから車両、モータバイク、人(歩行者)等を区別して精度よく認識することができる技術を提供する。
【解決手段】探査対象となる物体とレーザレーダ2との距離に応じて変化するレーザレーダ2の反射の検出パターンが、距離ごとの特徴パターンとして物体の種類別に記憶部7に記憶されており、レーザレーダ2の反射の検出パターンと、記憶部7に記憶された特徴パターンとが認識処理部4により照合されて検出パターンの物体の種類が識別されるため、車両と認識対象である物体との距離が変化しても、レーザレーダ2の反射の検出パターンから車両、モータバイク、自転車、歩行者(人)等を区別して精度よく認識することができる。
(もっと読む)
画像処理装置
【課題】ウィンドウ内で複数の異なる性質を有する領域の有無を判定できる画像処理装置を得る。
【解決手段】局所領域を設定する局所領域設定部2と、局所領域のコヒーレンスを算出する局所領域コヒーレンス算出部3と、局所領域を複数のサブウィンドウに分割するサブウィンドウ設定部7と、コヒーレンスの理論平均値を算出する理論平均値算出部4と、コヒーレンスの理論標準偏差を算出する理論標準偏差算出部5と、閾値を算出する閾値算出処理部6と、各サブウィンドウのコヒーレンスを算出するサブウィンドウコヒーレンス算出部8と、各サブウィンドウのコヒーレンスの平均値を算出する平均処理部9と、閾値及び前記サブウィンドウのコヒーレンスの平均値の閾値処理に基づき、局所領域が一様な領域であるのか、局所領域内に異なる性質を有する領域の境界が含まれるのかを判定する境界領域判定処理部10とを設けた。
(もっと読む)
レーダ装置、及び方位算出方法
【課題】異なるターゲットに対応する周波数スペクトルが重なった場合でも、各ターゲットの方位を正確に算出可能なレーダ装置に関する技術を提供することを課題とする。
【解決手段】少なくとも二つの受信アンテナを介して受信される反射波を、各受信アンテナの受信信号として受信し、送信信号と受信信号から生成されるビート信号のピーク周波数の位相差を算出し、算出された位相差を記憶領域に記憶し、算出された位相差に基づいてターゲットの方位を算出する。また、算出された方位に関する方位情報を含む、ビート信号のピーク周波数の変化を予測する予測情報に基づいて、複数のターゲットのピーク周波数が重なるか否かを予測し、記憶領域に記憶される位相差に基づいて、ピーク周波数が重なる際の位相差を予測位相差として算出し、ピーク周波数が重なると予測される場合、予測位相差に基づいてターゲットの方位を算出する。
(もっと読む)
超解像イメージングレーダー
拡張現実におけるオブジェクトの追跡
一般的に、オブジェクトを追跡するための技術が説明される。いくつかの実施例では、システムは、モバイルフォンおよび拡張現実デバイスを備えてよい。モバイルフォンは、送信波を受信し、オブジェクトから反射された反射波を受信するのに有効である。モバイルフォンは、送信波と反射波との間の差異を判定し、判定された差異に基づいて第1の追跡データを生成するように構成され得る。拡張現実デバイスは、第1の追跡データを受信し、第1の追跡データに基づいてオブジェクトの位置に関する第2の追跡データを判定するように適応され得る。判定された第1の追跡データおよび第2の追跡データに基づいてディスプレイ上で画像が生成され得る。 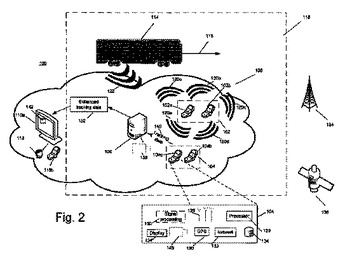 (もっと読む)
(もっと読む)
エコー信号処理装置、レーダ装置、エコー信号処理方法、およびエコー信号処理プログラム
【課題】送信パルスの条件に起因するぼやけを解消し、物標を明りょうに表示することができる画像処理方法を提供する。
【解決手段】測定データのうち、サンプル間の値の変化度合いが相対的に大きいサンプルの測定データを強調するエッジ強調処理を行い、エッジ強調処理後の測定データを用いてスキャン相関処理を行う。物標の輪郭のうち、自船に近い箇所は、サンプル間の値の変化度合いが相対的に大きい箇所である(エコーレベルが急激に立ち上がる箇所である)。この立ち上がり部分の測定データは、パルス長等の送信パルス条件が変化しても大きく変動しない情報である。したがって、エッジ強調処理を行ってからスキャン相関を行うことにより、送信パルスの条件に起因するぼやけ等を解消し、物標の輪郭を明りょうに表示することができる。
(もっと読む)
空港面監視方法及び空港面監視システム
【課題】 複数の目標が接近して一目標と認識してしまう程度の方位分解能である一次レーダであっても、二次レーダを利用して、方位分解能を擬似的に向上させ、近接した複数の目標の誤検出を減少させて、精度の高い航跡(統合航跡)を生成することが可能な空港面監視方法及び空港面監視システムを提供すること。
【解決手段】 一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーを間引き、前記一次レーダによる目標位置を検出して目標の航跡を得る。
(もっと読む)
141 - 160 / 636
[ Back to top ]