
Fターム[5J070AJ14]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | ビデオメモリを持つもの (762) | 複数のビデオメモリ (126)
Fターム[5J070AJ14]に分類される特許
41 - 60 / 126
送受信モジュール故障分離自己診断システム
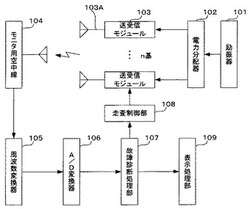
【課題】近くでほかのレーダが運用していても正確に故障の有無を判定可能な送受信モジュール故障分離自己診断システムを提供することを目的とする。
【解決手段】試験信号を時間経過とともに周波数が変化するように変調し、評価式と閾値との関係から送受信モジュールの故障を診断する。評価式に入力する値を測定する評価ポイントは、複数設けられる。評価ポイントは任意のタイミング又は位相において設定される。評価式による判定は、複数回行われてもよい。
(もっと読む)
パルスレーダ装置

【課題】必要なメモリ容量を低減するとともに、1回の検出サイクルに要する時間を大幅に短縮化したパルスレーダ装置を提供する。
【解決手段】補助演算処理部120では、第1メモリと第2メモリの2つのメモリを用いて読み出しと書き込みを交互に行うために、4つのスイッチ131〜134を備えている。第1スイッチ131の接点aにプリサム処理部123の出力側が接続され、第2スイッチの接点aには判定部111の入力側が接続されている。また、第3スイッチ131及び第4スイッチの接点aには、複素FFT処理部124の入力側、出力側がそれぞれ接続されている。さらに、スイッチ131〜134のそれぞれの接点bに第1メモリ125が接続され、接点cに第2メモリ126が接続されている。
(もっと読む)
車両速度計算装置及び車両速度計算方法及び車両速度計算プログラム
【課題】レーダの観測データから車両の速度を高精度で求める。
【解決手段】車両速度計算装置100において、車両検出部103は、合成開口レーダ(SAR)によって、道路が敷設された地域を観測し、その結果として得られたレーダ画像201から、道路の近傍に存在する車両を検出する。ドップラシフト量推定部104は、道路301の位置と車両検出部103が検出した車両のレーダ画像201における位置との間の距離に基づいてドップラシフト量を推定する。速度計算部105は、ドップラシフト量推定部104が推定したドップラシフト量を車両検出部103が検出した車両の速度へ換算する。
(もっと読む)
模擬クラッタ発生装置
【課題】 精巧な模擬クラッタ信号を生成し、レーダ表示器に供給表示できる模擬クラッタ発生装置を小型にすることを目的とする。
【解決手段】 統計データに基づく変調を個別の機能回路で行う場合、機能数だけ回路の増加となり大型化するので、周波数アキュムレータを用いたディジタル信号発生部を設け、ドップラ周波数情報、統計的データに基づく位相及び振幅変調情報、反射強度に応じた振幅情報を入力して、ディジタル信号にて各種変調を施した模擬クラッタ信号を発生させることで、信号発生、及び変調回路部の統合化による小型化を可能とする。
(もっと読む)
移動軌跡算出装置および移動軌跡算出方法
【課題】少ない計算量かつ高精度で、移動体の軌跡を算出する。
【解決手段】本発明の移動軌跡算出装置は、観測エリアを観測して得た、観測時刻と複数の観測値とを含む複数のセンサデータを記憶する手段と、前記観測エリアを分割した複数の区間における隣接区間同士毎に一方から他方の区間およびこの逆方向の移動コストを記憶する手段と、直前の観測時刻までに特定された第1〜第Lの観測値系列毎に、前記観測値系列の最新の観測値を含む区間からの合計移動コストが所定コスト以下である次の時刻の観測値群を第1〜第Lの観測値群として選択する手段と、前記第1〜第Lの観測値系列に対して第1〜第Lの観測値群からそれぞれ異なる1つの第1〜第Lの観測値を選択して割り当てる複数のパターンを生成する手段と、前記第1〜第Lの観測値系列の前記パターンの各観測値に対する尤度の合計をパターン毎に計算する手段と、尤度の合計が最も高いパターンを選択する手段とを備える。
(もっと読む)
侵入検知装置および侵入検知方法
【課題】誤警報を防止し、簡単な構成で、侵入行為を検知することができるようにする。
【解決手段】侵入検知装置1は、自動車の車内への侵入を検知する装置である。電波センサ11は、物体に対して送信した信号と、その信号が物体に反射して返ってきた信号から得られるドップラ信号を出力信号として出力する。分散算出部23は、出力信号が2値化された2値化信号から生成された出力信号の周波数のヒストグラムに基づいて、出力信号の所定期間の周波数の分散値を算出する。振幅値抽出部25は、出力信号の振幅値の所定期間における最大値を抽出する。侵入判定部26は、出力信号の所定期間における周波数の分散値および最大値のそれぞれを、対応する閾値と比較することにより、車内への侵入の有無を判定する。本発明は、例えば、自動車に搭載される車載装置に適用できる。
(もっと読む)
レーダ装置
【課題】各探知距離領域において探知できない方位角範囲が広くならないようにできるレーダ装置を簡易且つ低廉な構成にて実現する。
【解決手段】送信部12は、同一種類の単パルス信号同士が一定の繰り返し周期となるように、複数種類の単パルス信号を特定の順で切り替えながら送信する。受信部15は、受信データ記憶部51とパルス積分部52とを備える。受信データ記憶部51は、種類毎のパルス応答データを時間的配列が認識できるように所定回数分記憶する。この際、新たなパルス応答データが入力されると、当該新たな応答データを含む新しい側の所定回数分のパルス応答データを保持するように更新記憶する。パルス積分部52は、同一種類のパルス応答データを新しいデータ側の特定個数分だけ読み出してパルス積分する。
(もっと読む)
レーダ装置、レーダの制御方法、およびプログラム
【課題】操作員が指定した特定方位の目標探知性能や方位分解性能を向上させ、かつ1つの空中線部が機能喪失しても残りの空中線部で方位全周を監視できるレーダ装置を提供する。
【解決手段】フェーズドアレイアンテナを有する空中線部の方位を機械的に変更させるための空中線駆動部を設ける。さらに、各空中線駆動部を制御するための制御データを生成する空中線駆動制御部を設ける。これによって、操作員が表示・操作部から特定方位を指定すると、空中線駆動制御部が、その特定方位にビーム形成するアンテナ開口およびアンテナ素子数を増大させるように空中線部の設定方位を計算し、空中線駆動部を制御して所望の空中線部を回転させる。また、操作員が表示・操作部から機能を喪失した空中線部を指定すると、空中線駆動制御部が空中線駆動部を制御し、機能を喪失した空中線部を除く全ての空中線部によって方位全周の監視を継続的に維持させる。
(もっと読む)
レーダ装置
【課題】受信信号を積分処理するレーダ装置において、積分スイープ数の多いコヒーレント積分について、回路規模の増加を抑えつつ、すべての周波数成分の出力を可能とする。
【解決手段】レーダ装置は、データ入力部10、第1バタフライ回路20、第1セレクタ回路30、第2バタフライ回路40、及びデータ出力部50を有する。また、積分回路を前半と後半のバタフライ演算(第1及び第2バタフライ回路)をセレクタ回路で分離する。そして、セレクタ回路の選択位置によって出力する周波数成分を選択する。
(もっと読む)
物体検知装置
【課題】 FM・CW型の物体検知装置でのターゲットのミスペアリングを防止し、正しいペアリングのデータを遅滞なく出力して制御の応答性を高める。
【解決手段】 ピーク周波数候補算出手段S44が、任意のペアリング候補に対応する今回相対関係に基づいて前回処理サイクルにおける上昇側ピーク周波数あるいは下降側ピーク周波数をピーク周波数候補として算出すると、今回ペアリング候補確定手段S48が、ピーク周波数候補算出手段S44により算出されたピーク周波数候補と記憶手段に記憶されている前回処理サイクルのピーク周波数との差が所定値未満の場合に、今回相対関係の算出に用いられたペアリング候補を正しいペアリングの組み合わせとして確定する。このように、今回相対関係の正誤を前回相対関係に遡って検証するので、正しい今回相対関係を速やかに確定させて制御の応答性を高めることができる。
(もっと読む)
画像変化抽出装置
【課題】地表面に生じた物理的な変化をより高精度に抽出し、変化の空間的連続性を正しく表示する画像変化抽出装置を提供する。
【解決手段】コヒーレンスマップを対象に、ノイズ除去を行うノイズ除去部2と、ノイズ除去後の画像から特徴量抽出を行う特徴量抽出部6と、コヒーレンスマップを構成する画素のコヒーレンスの時間的、空間的平均値を算出するコヒーレンス平均算出部3と、コヒーレンスマップの時系列変化情報を用いて、変化抽出を行う変化抽出部4と、変化の発生時刻のずれを検出し、時刻調整を行う変化時刻調整部5と、変化選別を行い変化選別後の変化選別画像データを全体の出力とする変化選別部7とを備える。
(もっと読む)
レーダ装置
【課題】距離アンビギュィティを解消し高距離分解能化する測距性能を向上できるレーダ装置を得る。
【解決手段】FMレンジング後の距離分解能と、PRI内の距離分解能が高精度になるようなパラメータに基づき複数のPRIに渡って周波数変調されたキャリア信号に対してPRIでパルス変調された送信信号を放射する送信機3と、目標で反射して戻った受信信号に対して、キャリア信号を用いてダウンコンバートし受信ビート信号に変換する受信機8と、受信ビート信号に対しFMレンジングを行い、PRI内の距離−FMレンジング後の距離マップを作成する距離マップ作成手段201と、PRI内の距離−FMレンジング後の距離マップに対し、信号の強度に基づき目標候補を検出する目標候補検出手段220と、目標候補のFMレンジング後の距離を用いて目標との相対距離を算出する目標相対距離算出手段221とを設けた。
(もっと読む)
姿勢計算装置及び誘導装置及び姿勢計算装置の姿勢計算方法及び姿勢計算装置の姿勢計算プログラム
【課題】目標物周辺の地面の傾斜を正確に検出することができ、斜面に設定された目標物に対して予め想定された姿勢角で正確に到達することのできるように計算する姿勢計算装置を提供する。
【解決手段】目標座標取得部121が目標の2次元の位置座標である目標座標20を取得し、DEMデータベース122が所定の領域内における複数の点の標高情報を含む3次元位置座標を記憶し、傾斜算出部123がDEMデータベース122に記憶された3次元位置座標の中から、目標座標取得部121により取得された目標座標近傍の複数の3次元位置座標を目標周辺DEMデータ21として取得し、傾斜算出部123が複数の目標周辺DEMデータ21に基づいて、目標の周囲の領域の傾斜角22を処理装置により算出し、姿勢角計算部124が傾斜算出部123により算出された傾斜角22に基づいて、飛翔体の目標に対する姿勢を制御するための飛翔体の姿勢角23を計算する。
(もっと読む)
気象予測装置、気象予測方法および気象予測プログラム
【課題】2次元の気象画像を用いて気象予測を行うとともに、気象状態を推定する。
【解決手段】気象予測装置であって、時系列に連続した複数の2次元の気象画像を入力する入力手段と、気象画像の画像濃淡値のもとづいて雨雲または雷雲のパターンが存在する2次元のパターン領域を検出する画像特徴量解析手段と、パターン領域の3次元モデルを生成する3次元モデル化手段と、連続する気象画像から前記パターン領域の動きベクトルを算出し、当該動きベクトルに基づいて前記パターン領域を変化させて予測される気象画像を生成する予測手段と、3次元モデルの高さの変化に基づいてパターン領域の気象状態が発達、衰退、停滞のいずれであるかを推定する状態推定手段と、を有する。
(もっと読む)
人体存在検知装置及び人体存在検知方法
【課題】低コストで実現可能であると共に、人体が存在するか否かの検知を、操作者である人体が操作する電子機器等の制御に適合しやすい人体存在検知装置を、提供する。
【解決手段】基準位置から一定距離内に、人体が存在するか否かの判断を行う機能を備えた人体存在検知装置1を、基準位置から一定方向に存在する人体または物の存在位置に対する基準位置からの離間距離を一定時間経過毎に測定する離間距離測定手段2、該測定された離間距離に基づき一定距離内外判定結果と動静判定結果とを形成する判定結果形成手段3、該一定距離内外判定結果と、該動静判定結果とで構成される検知状態情報を形成する検知状態情報形成手段4、該検知状態情報に基づき状態遷移パターンを形成する状態遷移パターン形成手段5、及び、該状態遷移パターンに基づき、基準位置から一定距離内に、人体が存在するか否かを判断する判断手段6で構成する。
(もっと読む)
自動車用レーダーのためのデュアルバンドアンテナアレイおよびRFフロントエンド
【課題】デュアルバンドアンテナアレイと長距離狭帯域レーダーおよび短距離超広域レーダーを結合するRFフロントエンドとを有する低コストの3次元集積自動車用レーダーを提供する。
【解決手段】自動車用レーダーは、上面と底面を有する印刷回路基板と、印刷回路基板の底面にマウントされたプロセッサとを含む。自動車用レーダーはさらに、印刷回路基板の上面に形成された第2の液晶ポリマー層と、パッチを有しかつこの第2の液晶ポリマー層上に印刷された第2のマイクロストリップアレイと、第2の液晶ポリマー層上に形成された第1の液晶ポリマー層と、有孔パッチを有しかつ第1の液晶ポリマー層上に印刷された孔第1のマイクロストリップアレイと、さらに、第2の液晶ポリマー層の底面に接続され第1のマイクロストリップアレイに第1の周波数の信号を第2のマイクロストリップアレイに第2の周波数の信号を送信する送信/受信モジュールとを含む。
(もっと読む)
物体位置検出装置
【課題】 自車両の後方に存在する物体が位置する車線を精度良く推定できる物体位置検出装置を提供すること。
【解決手段】 自車両の後方に存在する他車両等の後方物体が位置する車線を推定する物体位置検出装置1であって、バッファ更新処理部82によって自車両の過去の走行位置を記憶し、他車両絶対位置演算部83によって後方物体の位置を検出し、自車両の過去の走行位置と後方物体の後方物体の位置との相対位置関係に基づいて、他車両車線推定部85によって後方物体が位置する車線を推定する。よって、自車両が走行した車線に対する後方物体の位置が推定できる。このため、後方物体が位置する車線を精度良く推定することができる。
(もっと読む)
植生生育状況解析方法、プログラムおよび植生生育状況解析装置
【課題】人工衛星等の飛翔体から得られるレーダ画像を利用して、多時期の植生の生育状況を正確に解析できるようにする。
【解決手段】飛翔体に搭載されたレーダ装置で複数の時期に撮影された、同一対象エリアの地表面のレーダ画像を取得し、取得された複数のレーダ画像を地図データベースに保存する。次に、所定時期に撮影されたレーダ画像を基準画像として、他の時期に撮影されたレーダ画像の位置合わせを行った後、前記レーダ画像の特定領域の後方散乱係数を抽出する。さらに、前記地図データベースに保存された複数のレーダ画像のうち、前記基準画像の特定領域の後方散乱係数を基に、他のレーダ画像の後方散乱係数を較正する。そして、レーダ画像の後方散乱係数と植生の生育値の相関関係に基づいて、前記較正されたレーダ画像の後方散乱係数から当該レーダ画像に写っている植生の生育値を算出する。
(もっと読む)
レーダ送受信機、及びレーダ装置
【課題】 ビート信号のレベルに基づきアップビート周波数とダウンビート周波数のペアリングを確度良く行う。
【解決手段】 レーダ送受信機は、変調期間ごとに所定の周波数変調幅で周波数が上昇する第1の送信信号と、前記変調期間ごとに前記所定の周波数変調幅で周波数が下降する第2の送信信号とを前記変調期間より短いスイッチング周期で交互に切替えて送信し、前記変調期間における前記第1の送信信号とこれに対応する受信信号との周波数差を有する第1のビート信号と、前記第2の送信信号とこれに対応する受信信号との周波数差を有する第2のビート信号とを生成するので、従来、異なる時間帯で生成されていたビート信号を同一の変調期間内にほぼ同時に生成できる。よって、時間差に起因してペアリングすべきアップ/ダウンビート周波数のビート信号にレベル差が生じることがなくなり、ペアリングを確度よく行うことができる。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】ランダムに検出される検出位置情報に基づいて、正確に物体の進行方向および速度を検出できるようにする。
【解決手段】検出位置特定部81は、検出された物体の検出位置における速度、距離、および角度に基づいて、物体の相対的な検出位置を特定し、含有数カウント部86は、物体の相対的な検出位置を時刻に対応付けて、水平方向の検出位置を示す軸と進行方向の検出位置までの距離を示す軸とで設定される2次元の平面上にプロットし、物体の進行方向の先頭部分が所定時間内に通過すると予想される平面上の形状からなるフレームを所定の回転角度で回転させながら、回転角度毎にフレーム内に含まれるプロットされた検出位置の数をカウントし、方向決定部87は、カウントされたプロット数が最大となるフレームの回転角度に基づいて、物体の存在する存在位置、および進行方向を決定する。本発明は、車両安全装置に適用することができる。
(もっと読む)
41 - 60 / 126
[ Back to top ]