
Fターム[5J070AJ14]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | ビデオメモリを持つもの (762) | 複数のビデオメモリ (126)
Fターム[5J070AJ14]に分類される特許
81 - 100 / 126
画像処理装置及び画像処理システム及び画像処理方法及び画像処理プログラム
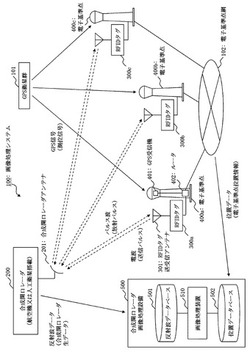
【課題】能動的に電波を放射するRFIDタグなどを利用して、合成開口レーダの再生画像から特定の位置を容易に検出し、その位置に合わせて再生画像を補正する装置を提供することを目的とする。
【解決手段】画像処理装置510は、合成開口レーダ200からのパルス波に応じてRFIDタグ300aから送信された電波と地表からの当該パルス波の反射波とを反射波データとして反射波データベース501から取得する。そして、RFIDタグ300aから電波により送信された識別子データを反射波データから取得する。また、RFIDタグ300aの識別子データに対応する設置データを位置データベース502から取得し、その設置データにより示された電子基準点400aから位置データを取得する。画像処理装置510は、反射波データに基づいて地表の画像を生成し、位置データに基づいて当該画像を補正する。
(もっと読む)
位置情報生成システム、位置情報生成装置、コンピュータプログラム及び位置情報生成方法

【課題】車両などの移動体の位置を精度よく特定することができる位置情報生成システム、該位置情報生成システムを構成する位置情報生成装置、該位置情報生成装置を実現するためのコンピュータプログラム及び位置情報生成方法を提供する。
【解決手段】車載機100は、第1の信号を路側機の第1通信部及び第2通信部へ送信し、路側機の第1通信部及び第2通信部が送信した第2の信号を受信することにより、車載機100の第1通信部からの距離L1を算出するとともに、車載機100の第2通信部からの距離L2を算出する。車載機100は、第1通信部及び第2通信部の位置を中心とした円又は球の交点を自身の位置として特定して位置情報を生成する。
(もっと読む)
レーダシステム
【課題】監視目標に異常が発生した場合に、空港監視レーダ、二次監視レーダそれぞれで取得される目標情報の妥当性を容易に解析できるようにする。
【解決手段】レーダシステムにおいて、空港監視レーダ10では、デジタル変換直後のデジタル信号にタイムスタンプを付与し、タイムスタンプを付与したデジタル信号から検出情報Aを生成し、二次監視レーダ20では、デジタル変換直後のデジタル信号にタイムスタンプを付与し、タイムスタンプを付与したデジタル信号から検出情報Bを生成するものとし、表示装置40において、生成された検出情報A,Bに基づいて目標情報を表示し、この目標情報と同時にタイムスタンプを表示すると共に、表示される目標情報及びタイムスタンプを保存部50に保存する。このように保存されたタイムスタンプを参照することで、各レーダが受信した目標情報のうち、監視目標の目標情報のタイムスタンプと一致するタイムスタンプを付与された目標情報を検索することが可能となる。
(もっと読む)
位置判定方法
【課題】GPSによる位置取得やタグリーダの位置等の、絶対的位置が特定できる参照データを用いることなく、物体の位置を特定すること。
【解決手段】物品検索装置100は、検索対象物が指定された場合に、検知記録データに基づいて、検索対象物が最後に検知された最終検知日時を判定し、最終検知日時および検知記録データに基づいて、最終検知日時と同じ日時に検知された物体のうち、検索対象となる物体の所有者とは異なる他人が所有する物体を判定し、判定した物体の所有者のスケジュール表を基にして、検索対象物の位置を判定する。
(もっと読む)
レーダ装置
【課題】目標の構造や姿勢によらず、画素欠落の少ない、正確な目標画像を取得可能にする。
【解決手段】所定の観測時間内で異なる時刻ごとに観測したレーダ受信信号から時刻別のISAR画像を順次生成するISAR処理手段と、生成された時刻別のISAR画像を格納する複数の画像メモリと、複数の画像メモリに格納された時刻別のISAR画像から目標の特徴点をそれぞれ抽出する複数の特徴点抽出手段と、抽出されたそれぞれの目標の特徴点の相関をとり、レンジ方向、ドップラー方向の補正値を算出する相関処理手段と、算出されたレンジ方向、ドップラー方向の補正値に基づいて、複数の画像メモリ内に格納された時刻別のISAR画像それぞれを補正する複数のレンジ・ドップラー補正手段と、補正された各ISAR画像を積分する積分手段を備える。
(もっと読む)
レーダ装置および類似装置、画像表示方法
【課題】
探知レンジを変えた場合に、それまでに蓄積していた探知画像を変更後のレンジの縮尺に変換することによって、それまでに蓄積していた探知画像を消すことなく引き続いて新しい縮尺での表示が可能となるレーダ装置および類似装置を提供する。
【解決手段】
レンジ変更時の探知画像描画方法であって、探知画像をメモリに記憶し表示部に出力する工程と、画面上に表示する付加情報を記憶し前記付加情報を前記表示部に出力する工程と、記憶した前記探知画像からコンピュータの画像操作機能を用いてレンジ変更後の縮尺に適合するレンジ変更後画像を算出して記憶する工程と、記憶した前記付加情報から前記レンジ変更後の縮尺に適合するレンジ変更後付加情報を算出して記憶する工程とを備えることを特徴とする。
(もっと読む)
レーダ装置
【課題】レーダ装置の方位分解能及び距離分解能を、アンテナの長さを変化させることなく向上させる。
【解決手段】水平回転するアンテナからの複数回の送信波に対応する物標A、Bからの複数回の反射波を受信し、物標A、Bまでの距離及び方位を測定するレーダ装置であって、受信した反射波に対応する物標A、Bからの複数の受信信号値により形成される上方に凸形状の応答特性100、102の最大値を求めた後、応答特性100、102の最大値(物標A、Bからの反射強度)を変化させずに、最大値の両近傍の受信信号値が徐々により小さい値となる演算処理を行うことで凸形状をより急峻な形状とする。これにより、アンテナの長さを変えることなしに方位分解能が向上した応答特性106を得ることができる。
(もっと読む)
情報表示装置
【課題】1つの表示画面上に各種情報処理端末から得られた動的な情報をリアルタイムに表示しつつ、ユーザが簡単な操作によって所望の機能選択を実行できる情報表示装置を提供することを目的とする。
【解決手段】表示画面上に表示中のメニュー項目の階層を容易に把握できるようにメニュー項目の内容とともに階層に関する情報100、101を表示し、表示したメニュー項目の選択をロータリーエンコーダなどの回転操作部52を用いて操作するようにした。
(もっと読む)
電波発信装置の個体識別装置
【課題】 無線機、レーダ等の電波発信装置の個体識別を精度よく行うことができる個体識別装置を提供する。
【解決手段】 電波発信装置の個体識別装置において、測定対象信号の立上がり波形をリアルタイムに記録する波形記録部と、受信した信号を検波する検波部と、検波したパルス信号の諸元を検出する諸元検出部と、受信信号の周波数変移及びその他の諸元をライブラリに保存するデータベース部と、波形記録部に記録された波形データを信号立上がり時の周波数変移によってグループ分けし、データベース部に格納されているライブラリデータと照合する統合処理部とを備えた。
(もっと読む)
解釈型航空機搭載型レーダ・マップの生成の方法およびシステム
【課題】飛行機レーダシステムから陰になっている地上特徴(地形/障害物)を識別して一意に表示するシステムおよび方法を提供する。
【解決手段】例示的なシステムは、1又は複数の航空機情報源と、3次元地形/障害物データを格納するデータベースと、表示装置と、1又は複数の航空機情報源およびデータベースとデータ通信するプロセッサとを含む。プロセッサは、1又は複数の航空機情報源から、航空機位置、飛行方位及び高度情報を受信する。プロセッサは、受信された航空機位置、飛行方位及び高度情報に基づいて、3次元デジタル空間のベクトルを、データベースに格納された3次元地形/障害物データに投影して、その投影されたベクトルが1より多い地形特徴と交差するかを判断する。その特徴がそのベクトルと交差するものであり、且つそのベクトルと交差する別の特徴よりも更に航空機から離れている場合に、表示装置に一意に表示される。
(もっと読む)
空港面監視システムおよび空港面監視方法
【課題】空港面に存在する目標の誤検出を減少し、誤ターゲットの表示を抑制できる空港面監視システムを提供する。
【解決手段】ASDE10を用いたASDE追尾系統とMLAT20を用いたMLAT追尾系統を備え、MLAT追尾系統は、MLAT20が出力する目標位置検出情報に基づいて目標近傍の領域に対してはASDE追尾系統のビデオレベル判定部13のスレッショルドレベルを下げ、目標近傍以外の領域に対してはビデオレベル判定部13のスレッショルドレベルを上げるASDEビデオレベル判定用マップ情報205をビデオレベル判定部13に出力するスレッショルドMAP作成処理部23を有している。
(もっと読む)
レーダ装置
【課題】方位方向に加えて仰角方向の角度誤差を測定でき、プラットフォームが移動していても角度誤差を測定できるレーダ装置を得る。
【解決手段】移動するプラットフォーム1に搭載され、基準目標3に対し電磁波ビームを放射し基準目標からの散乱波を観測する送受信アンテナ2、放射ビームを制御するビーム制御手段8、送受信アンテナに送信信号を送信すると共に、送受信アンテナにより受信される基準目標の信号強度の観測値を得る送受信機9、アンテナ利得の角度特性を記憶した第1のデータベース10、基準目標の座標と電気的特性を記憶した第2のデータベース11、ビーム制御手段による制御値、第1及び第2のデータベースの記憶値、プラットフォームの座標及び姿勢角に基づき基準目標からの信号電力を予測する予測手段12、信号強度の観測値と予予測値との照合に基づき送受信アンテナの取付誤差角度を推定する照合手段13を備える。
(もっと読む)
マルチレイヤ画像処理装置及びレーダ装置
【課題】レイヤ毎にメモリバスを用意したり、また一時保存用のメモリを用意したりすることなく、これにより基板製造コストや部品コストの増加を防ぎ、マルチレイヤ画像のメモリアクセス処理を簡略化し得るマルチレイヤ画像処理装置を提供する。
【解決手段】VRAM160に対する複数のレイヤ画像データの書き込み実行に先立ち、メモリコントローラ150にてVRAM160のアドレスラインの一部をデータマスクラインにして、アドレス変換処理を実行することで、CPU120から見たVRAM160のメモリマップを、画像処理部170から見たVRAM160のメモリマップに変換するようにして、CPU120及び画像処理部170の両方から見てメモリ空間が連続になるようにしている。
(もっと読む)
レーダ信号処理装置
【課題】処理パラメータの設定においてカード間で生じる時間遅延差をなくすことを可能にするレーダ信号処理装置を得ることを目的とする。
【解決手段】複数のカードのそれぞれが、CPUがパラメータ設定指示を行って送信した処理パラメータを一時的に格納しておく保持用バッファを備え、複数のカードのうちの1つが、各カードに割り当てられた処理パラメータが保持用バッファに格納された後にCPUから出されるライトアクセスに応じてパラメータ設定開始信号を生成するパラメータ設定開始信号生成部をさらに備え、各カードの保持用バッファは、パラメータ設定開始信号に基づいて、格納されていた処理パラメータをそれぞれの対応するデータ処理部に一斉に設定するようにしたものである。
(もっと読む)
レーダ追跡装置及びその方法
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得更新部を具備するα−β追跡フィルタを有するレーダ追跡装置である。 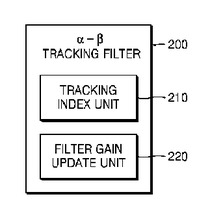 (もっと読む)
(もっと読む)
広帯域レーダ装置及びその移動物体検出方法
【課題】広帯域レーダ装置において、移動物体の位置検出精度を高め、かつ信号を変換するときの計算回数を少なくすることである。
【解決手段】2次元座標上の距離を示す距離設定値を設定する(S13)。設定した距離設定値に応じた角度ステップ(角度間隔)を計算する(S114)。次に、計算により求めた角度ステップに基づいて角度を設定する(S15)。1次元のUWBレーダパルス応答差分信号から、距離設定値と角度により定まる2次元平面上の該当する位置の受信信号強度を計算する(S15)。これにより1次元の信号が2次元のUWBレーダパルス応答差分信号に変換される。
(もっと読む)
信号処理装置
【課題】AD変換のサンプリング周波数に起因する算出距離の誤差を低減する信号処理装置を提供する。
【解決手段】第1AD変換器89は第1ADクロックでアナログ受光信号をAD変換し、第2AD変換器90は第1ADクロックと位相が半周期ずれた第2ADクロックで同じアナログ受光信号をAD変換する。FF回路91aは第1ADクロックで第1AD変換器89のAD変換結果を記録し、FF回路92aは第2ADクロックで第2AD変換器90のAD変換結果を記録する。FF回路91b、92bは、第1ADクロックでFF回路91a、92aが記録した個々のデータを別々に記録する。DPRAM94は、第1ADクロックでFF回路91b、92bが記録した個々のデータを一塊のデータとして書込み、書込み済みの一塊のデータを個々のデータに分割して2回に分けてロジッククロックで個々のデータを読込んで積算処理部98に出力する。
(もっと読む)
目標表示装置及び目標表示方法
【課題】目標対象を効率良く探知することを可能とする。
【解決手段】目標情報データベース12aには、探知目標入力装置により探知された目標対象の目標情報が記憶される。CPU11は探知する目標対象の種類と探知期間とを指定する探知条件にしたがって目標情報データベース12aから目標情報を抽出する。この抽出された目標情報に基づいて、CPU11は目標対象の探知頻度を表す重複度を算出して重複情報データベース12bに記憶する。そして、CPU11は、重複情報データベース12bに記憶された重複度をもとに目標分布を作成し、目標分布を包含する地図情報を地図データ12cから読み出し、目標分布を地図上に重畳したデータを表示出力I/F16から出力する。
(もっと読む)
追尾割当装置
【課題】複数ターゲットの追尾を複数センサに割当てる場合に、高速に最適割当を実現できる追尾割当装置を得る。
【解決手段】ターゲットDB13と、ターゲット想定軌道束を算出するターゲット想定軌道束算出機能11と、監視要求をターゲットDBに記憶させる監視要求記録機能12とを有するターゲット管理部10と、センサDB24と、割当可能数推移DB25と、既割当スケジュールを記憶する既割当スケジュールDB26と、割当可能数推移を算出する割当可能数推移算出機能21と、センサ毎監視可能期間を算出するセンサ毎監視可能期間算出機能22とを有するセンサ管理部20と、追尾精度貢献度DB32と、追尾精度貢献度を算出する追尾精度貢献度算出機能31とを有する誤差算出部30と、追尾精度貢献度の加算結果から最適割当スケジュールを算出する最適割当算出機能41を有する割当算出部40とを備える。
(もっと読む)
パルスレーダ装置
【課題】時間差分を求める際の時間差を調節することによって、所望の対象物の移動速度に応じた効率の良い検出方法を提供することができるパルスレーダ装置を提供する。
【解決手段】パルス状の電波を対象物に向けて送信する送信部1と、この送信部1を間欠送信する際の時間間隔を制御するパルス制御部2と、対象物からの反射波を受信アンテナ3で受信する受信部4と、受信部4からの受信信号の波形を複数蓄積する履歴蓄積部5と、履歴蓄積部5からの複数の履歴信号を用いて受信信号との差分を求める差分演算部6と、差分演算部6から得られる差分信号の波形立ち上がりタイミングを検出する検出部7と、パルス制御部2からの制御信号と検出部からの検出信号を用いて移動成分の距離を求める距離演算部8と、を設けた。
(もっと読む)
81 - 100 / 126
[ Back to top ]