
Fターム[5J070AK04]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 検出値の補正 (378)
Fターム[5J070AK04]の下位に属するFターム
温度補正 (28)
Fターム[5J070AK04]に分類される特許
21 - 40 / 350
アンテナ配置算出装置
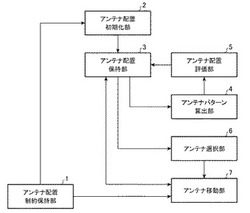
【課題】アンテナを2次元空間や3次元空間に配置する場合でも、サイドローブレベルが最小に近いアンテナ配置を効率よく算出することができるようにする。
【解決手段】アンテナ配置保持部3に記録されている評価値が最も良いアンテナ配置を選択し、そのアンテナ配置が示す位置に配置される複数のアンテナの中で、任意のグループに属しているアンテナを選択するアンテナ選択部6や、アンテナ選択部6により選択されたアンテナの位置を変化させて新たなアンテナ配置を生成し、そのアンテナ配置をアンテナ配置保持部3に記録するアンテナ移動部7などを設ける。
(もっと読む)
画像レーダ装置

【課題】目標とレーダの間の相対運動が未知である等の場合でも、回転運動によって発生する画像のぼけを精度よく補償することができるとともに、クロスレンジスケーリングを実施できるようにする。
【解決手段】レンジヒストリ取得回路1により取得されたレンジヒストリで、不要な並進運動によって発生するレーダと目標間の不要な距離変化を補償する並進運動補償回路2や、並進運動補償回路2により距離変化が補償されたレンジヒストリで、目標における高周波信号の各反射点で、回転運動によって発生するレンジ方向のぼけを補償する回転レンジセル移動補償回路3などを設ける。
(もっと読む)
物体距離検出装置
【課題】物体に対する距離の検出精度を向上させる。
【解決手段】物体距離検出装置10は、レーダ装置11の発信部11aにより電磁波が発信された時刻から受信部11bにより反射波が受信された時刻までの時間差を検出し、時間差に基づき車両から物体までの距離を算出する距離検出部25と、時間差と反射波の受信強度との対応関係を示す2次元直交座標面上での受信強度分布の波形Fにおける受信強度の増加側および減少側での傾きに応じて、受信強度の極大値(推定ピーク電圧Vpeak)を推定する極大値推定部24と、受信強度分布の波形Fにおける受信強度が電圧閾値Vth以上である時間幅(推定パルス幅W)と、極大値(推定ピーク電圧Vpeak)とに基づいて、距離検出部25により算出された距離を補正する距離補正部26とを備える。
(もっと読む)
レーダ装置
【課題】距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度を推定することができるレーダ装置を得ることを目的とする。
【解決手段】Σ復調器10により復調されたΣ系受信信号から目標を検出して、その目標の測距値を出力する目標検出器14を設け、目標情報推定器15が、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から目標の測角値θs及びラジアル速度vsを推定するとともに、そのラジアル速度vsを用いて、目標検出器14から出力された目標の測距値を補正する。
(もっと読む)
車両用障害物検出装置
【課題】路面をターゲットであると誤検知することを防止することができる車両用障害物検出装置の提供を目的とする。
【解決手段】バンパ6裏面と車輪との間に設けられて、該バンパ6を透過して外方向に電波を送信することで障害物を検出するレーダ装置4を備えた車両用障害物検出装置であって、レーダ装置4の下部または下方には、レーダ装置4からの送信波の一部aがレーダ装置4の送信部とバンパ6裏面との間を通過して路面Bへ到達し、路面Bから帰来する路面到達波αにより生じる誤検知を防止する誤検知防止構造7が設けられたことを特徴とする。
(もっと読む)
車両用障害物検出装置
【課題】縁石などの道路構造物がターゲットであると誤検知するのを防止できる車両用障害物検出装置の提供を目的とする。
【解決手段】車両の少なくとも左右何れか一方においてバンパ6裏面と車輪2との間に設けられて車両外方へ電波を送信することにより障害物を検出するレーダ装置4を備えた車両用障害物検出装置であって、
上記レーダ装置4からの送信波の一部が車両外側の道路構造物に到達し、該道路構造物から帰来する道路構造物到達波αにより生じる誤検知を防止する誤検知防止手段7を備えたことを特徴とする。
(もっと読む)
レンジサイドローブ除去装置、信号処理装置、同信号処理装置を備えたレーダ装置、レンジサイドローブ除去方法及びプログラム
【課題】レンジサイドローブによる偽像を低減し、物標を確実に検出する。
【解決手段】レーダ装置1において、レンジサイドローブ除去装置36は、レーダーアンテナ10からの受信信号を取得し、パルス圧縮処理を行ってパルス圧縮信号を生成するパルス圧縮部33と、受信信号から、パルス圧縮信号のレンジサイドローブの擬似信号を生成する擬似レンジサイドローブ生成部34と、パルス圧縮信号から擬似信号に相当する成分を除去する信号除去部35と、を備える。
(もっと読む)
レーダ試験装置
【課題】
飛翔体に搭載された合成開口レーダが撮像したレーダ画像の絶対校正等に用いられるレーダ試験装置を提供することを目的とする。
【解決手段】
飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、レーダ試験装置は、合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、アンテナ部で受信したパルス信号に対する処理を実行する処理部と、を備えており、アンテナ部で受信したパルス信号に、処理部における遅延時間に対応する時間進みを与えることで、処理部における遅延時間を相殺する、レーダ試験装置である。
(もっと読む)
電波装置
【課題】複数の構成品を備える電波装置に関して補正データの更新忘れを防止する。
【解決手段】電波装置は、複数の構成品と、信号処理部とを備える。複数の構成品の各々は、不揮発性メモリを備え、その不揮発性メモリには、構成品の個体毎に異なる特性を補正するための補正データが格納されている。コンフィグレーション作業において、信号処理部は、複数の構成品の各々の不揮発性メモリから補正データを取得し、取得した補正データに基づいて各々の構成品の特性を補正する。
(もっと読む)
踏切障害物検知装置
【課題】周囲温度の変化等にかかわらず踏切道内における障害物の有無を安定して検知することのできる踏切障害物検知装置を提供する。
【解決手段】踏切障害物検知装置1は、踏切道10を含む検知領域内に電波を送信するとともに、この送信した電波に対する反射波を受信する送受信機2,3と、送受信機2,3によって受信された反射波の信号レベルと、あらかじめ設定された閾値とを比較して踏切道10内における障害物の有無を判定する信号処理部6と、を含む。信号処理部6は、送受信器2,3による電波の送信が可能な領域内に存在する特定の固定物(例えば反射板4a,5a)による反射波の信号レベルを監視し、この監視された反射波の信号レベルが変動した場合に送受信器2,3によって受信された反射波の信号レベル又は上記閾値を補正する。
(もっと読む)
追尾アンテナ装置の調整方法、及び追尾アンテナ装置
【課題】モノパルス追尾では、受信信号から生成した和信号と差信号を用いて方位角および仰角誤差を検出するが、和信号と差信号の群遅延差により誤りが生じる。この誤りを避けるためアンテナ追尾回路を校正する必要があるが、校正信号として連続波などの狭帯域な信号を用いた場合、位相の不定性により群遅延の補正に問題が生じる。
【解決手段】追尾アンテナの主反射鏡4上の仰角軸上の既知の位置に調整用アンテナ12を設置し、PSK変調波の調整用信号20を放射する。この時、調整用信号20とアンテナ指向方向の方位角は一致するため方位角誤差信号が0となるはずであり、アンテナ追尾回路の校正では和信号15と差信号16の群遅延差を可変遅延回路22、23で補正することでこれを0に調整する。
(もっと読む)
パルスレーダ装置及びその制御方法
【課題】多ピンコネクタを用いて装置を小型に実現しつつ、受信強度を超過する干渉ノイズ信号を低減し、かつ、該干渉ノイズ信号のレプリカを高速に更新し、物体検出を確実に実施することが可能なパルスレーダ装置及びその制御方法を提供する。
【解決手段】対象物情報検出処理を行うときは、高周波送信部110で送信信号を生成するパルス繰返し周期Tplsに第1のパルス繰返し周期Tpを設定し、レプリカ信号作成するときは、周期Tpより短いパルス繰返し周期Tplsに第2のパルス繰返し周期Tzを設定し、処理を行う。
(もっと読む)
車両レーダーのアライメント方法及びシステム
【課題】車両に装着されたレーダーの水平または垂直方向へのミスアライメント発生時、これを自動で検出して使用者に警告したり、これを自動で補正できるようにする車両レーダーのアライメント方法及びシステムを提供すること。
【解決手段】車両に設置されたレーダーが前方の地面に向かって電波を放射するステップと、前記地面から反射される反射波を受信するステップと、該反射波に基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するステップとを含むことを特徴とする。
(もっと読む)
センサ誤差較正システム
【課題】観測空間の位置・観測条件によりセンサの観測誤差が異なる場合にも、高精度に誤差補正を行う。
【解決手段】基準位置情報に基づいて観測空間の位置を算出し、センサ3を制御するセンサ制御手段8と、基準目標1の観測位置情報および基準位置情報に基づいて観測誤差・誤差補正値を算出する観測誤差算出手段10と、基準位置情報に基づく飛翔経路情報・観測環境情報を含む観測条件、観測空間の位置および誤差補正値を関連付けて蓄積する情報蓄積器12と、観測目標の飛翔経路情報・観測環境情報を含む観測条件および当該観測位置情報に基づく観測空間の位置に基づいて、情報蓄積器12から誤差補正値を抽出する観測誤差補正値最適化手段16と、抽出された誤差補正値を用いて、センサ3により観測された観測目標の位置を補正する観測誤差補正手段17とを備えた。
(もっと読む)
目標追跡装置
【課題】等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させた目標追跡装置を得る。
【解決手段】外部から入力される目標の状態ベクトルに基づいて、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出する補正情報算出部5aと、パッシブセンサからの測角データと補正情報算出部からの補正情報とに基づいて、該パッシブセンサを中心とする座標系における複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部2aを備える。
(もっと読む)
レーダ断面積測定装置
【課題】廉価でかつ高精度のレーダ断面積測定装置を得る。
【解決手段】被測定物100への照射電磁波の進行方向に直交する面内の鉛直方向の断面形状が放物線で、直交する方向の断面形状が直線となる円筒放物面反射鏡1を、測定波長と比べて十分細い径を有する金属円柱で形成する。測定制御部3は、円筒放物面反射鏡1で電磁波を反射させて波面の鉛直方向の曲率が0となる円筒波を、近距離に位置する被測定物100に照射し、被測定物100で反射され円筒放物面反射鏡1を介して得られる散乱電界のパターンを積算して求めた等価散乱係数から遠方領域のレーダ断面積を求める。
(もっと読む)
測角装置、レーダ装置、測角方法及び測角プログラム
【課題】マルチパス環境下において、短時間でより精度の高い仰角推定を可能とする測角装置等を提供する。
【解決手段】測角装置としての測角処理器5は、第1仰角算出部51、第2仰角算出部52及び直接波仰角出力部50を備えたことを特徴とする。第1仰角算出部51は、受信信号に基づいて直接波仰角及び間接波仰角を算出する。第2仰角算出部52は、受信信号に基づいて直接波仰角のみを算出する。直接波仰角出力部50は、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出された場合は第1仰角算出部51で算出された直接波仰角を出力し、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出されなかった場合は第2仰角算出部52で算出された直接波仰角を出力する。
(もっと読む)
目標追跡装置
【課題】等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させることができる目標追跡装置を得る。
【解決手段】目標を追跡するアクティブセンサ3からの観測値に基づく目標航跡と、目標の角度を測定するパッシブセンサ1からの観測値に基づく目標航跡とが同一目標を示していると判定した場合にこれら2つの目標航跡のデータ融合を行ってデータ融合航跡として出力するデータ融合部5と、データ融合部からのデータ融合航跡に基づいて、パッシブセンサからの観測値を入力して目標の航跡を算出するための補正情報を算出する補正情報算
出部6aと、パッシブセンサからの観測値と補正情報算出部からの補正情報に基づいて、複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標航跡として出力するパッシブセンサ処理部2aを備える。
(もっと読む)
受信装置
【課題】マルチパス環境においても良好な受信性能が得られる受信装置を得ること。
【解決手段】本発明は、航空機に搭載されたトランスポンダより送信されたモードS信号を受信する受信装置であって、受信データをオーバサンプルし、連続または非連続な複数のビット区間における全サンプル結果について、受信電力に基づき量子化を行い、量子化後の各サンプル結果のパターンを、予め用意しておいた、取りうるサンプルパターンにそれぞれに対応するビット判定値が示されたテーブルと比較してビット判定を行う。
(もっと読む)
FMCWレーダーシステム
【課題】1つのアンテナで間欠的に送受信を行う場合にもターゲット検出能力の劣化を防止することのできるFMCWレーダーシステムを提供する。
【解決手段】送信部と、アンテナと、受信部と、アンテナ共用部とを備えるFMCWレーダーシステムであって、送信部がローカル信号発生部と、送信信号発生部と、送信側ミクサと、間欠的に送受信開始指令を出力する送信側制御部と、を備え、受信部が、ビート波を生成する受信側ミクサと、ハイパスフィルタと、ターゲット情報抽出部と、を備え、送信信号発生部が、送受信開始指令の読み込み後に、振幅が零から所定の振幅まで徐々に大きくなる振幅漸増信号、周波数が所定の範囲で連続的に変化するチャープ信号、および振幅が零まで徐々に小さくなる振幅漸減送信信号を順次出力する。
(もっと読む)
21 - 40 / 350
[ Back to top ]