
Fターム[5J070AK04]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 検出値の補正 (378)
Fターム[5J070AK04]の下位に属するFターム
温度補正 (28)
Fターム[5J070AK04]に分類される特許
81 - 100 / 350
予測装置及び予測システム及びコンピュータプログラム及び予測方法
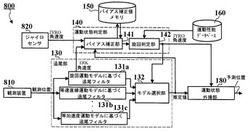
【課題】観測対象の将来の位置を高い精度で予測する。
【解決手段】観測装置810(位置観測装置)は、移動体(観測対象)の位置を観測する。ジャイロセンサ820(角速度観測装置)は、移動体の角速度を観測する。バイアス補正部141(角速度誤差推定装置)は、観測装置810が観測した位置に基づいて、ジャイロセンサ820が観測した角速度の誤差を推定する。バイアス補正部141(角速度補正装置)は、推定した誤差に基づいて、ジャイロセンサ820が観測した角速度を補正する。運動状態外挿部180(予測位置算出装置)は、バイアス補正部141が補正した角速度に基づいて、移動体の将来の位置を予測する。
(もっと読む)
物体検出装置

【課題】簡易な方法で、自車両に搭載された検出装置の検出方向軸のズレの補正を自車両の走路環境に応じて行うことのできる物体検出装置を提供する。
【解決手段】物体検出装置は、上記車両の車両情報を取得する車両情報取得手段と、上記車両情報を用いて上記車両の進行方向を算出する進行方向算出手段と、上記進行方向と一致する方向に上記検出手段の検出方向を補正する補正手段と、道路情報および上記車両の位置情報を含むナビゲーション情報を取得するナビゲーション情報取得手段と、当該ナビゲーション情報に基づき上記車両の位置が予め定められた条件を満たす場合、上記補正手段が行う上記補正を禁止する禁止手段とを備える。
(もっと読む)
パルスレーダ装置、パルスレーダ装置の目標物検出方法及び検出処理プログラム
【課題】1方向のビーム走査に要する時間を短くすると共に、2次トリップエコーとの判別を誤ることなく確実に1次エコーを検出することができるパルスレーダ装置を提供する。
【解決手段】パルス位相設定器11によって基準変化量φ1でNパルス分の初期位相を発生させ、送信パルス発生器12によってN個の送信パルス列を発生・送信する。目標で反射したNパルス分の受信信号を1組として目標信号を検出する。同様にして基準変化量φ2ついても目標信号を検出する。初期位相と逆の位相で受信信号を補正し、補正後の受信信号の位相回転量を比較して2次トリップエコーを除去すると共に1次エコーを検出しその目標データを出力する。
(もっと読む)
追尾装置、追尾方法、及びコンピュータプログラム
【課題】飛翔体のトランスポンダーから送信されてきた応答信号を受信し、その電波強度を基に、アンテナ角を飛翔体に追尾させる追尾装置で、サンプリングレートを高速化させることなく、高精度追尾が可能にする。
【解決手段】制御装置21の座標演算器22で現時刻の飛翔体の位置座標を算出し、位置推定器23で次時刻の飛翔体の位置座標を推定し、角度算出器24で次時刻のアンテナの角度の推定値を算出している。そして、推定された次時刻でのアンテナの角度を目標値として、アンテナ31の向きを制御している。このように、本発明の第1の実施形態では、次時刻でのアンテナの角度の推定値を目標値として、アンテナ31の向きを制御しているため、サンプリングレートを高速化させることなく、高精度追尾が可能になる。
(もっと読む)
合成開口レーダ装置
【課題】 航空機や衛星等の移動プラットフォームに送信アンテナを搭載し、地上に受信アンテナを設置し、GPS受信機で受信したGPS信号を用いて、送信アンテナと受信アンテナの時刻同期を行うバイスタティック合成開口レーダ装置において、GPS信号の精度が劣化した場合にも、ぼけのない合成開口レーダ画像を得る。
【解決手段】 送信側レーダとは異なる位置に設けられて離間配置された第1、第2の受信用アンテナを設け、第1、第2の受信用アンテナから受信した高周波パルス信号の位相差の観測値から、送信側レーダの時刻同期用信号と受信側レーダの時刻同期用信号の時刻同期誤差を求め、求めた時刻誤差によって第1、第2の受信用アンテナからの高周波パルス信号の位相補正を行い、合成開口処理を行う。
(もっと読む)
探索支援装置、探索支援方法、及びプログラム
【課題】物品の探索作業の効率性を簡便に向上させること。
【解決手段】所定の空間においてそれぞれ異なる位置に配置された複数の電波放射手段の電波強度を個別に変化させ、それぞれの前記電波放射手段ごとに、探索対象の識別情報が記憶されたICタグが検出される前記電波強度の境界値を探索する境界値探索手段と、前記所定の空間における位置情報と前記電波放射手段ごとの電波強度の組み合わせとの対応情報を記憶した対応情報記憶手段を用いて、前記境界値探索手段によって探索された前記境界値に対応する前記位置情報を特定する配置位置判定手段とを有する。
(もっと読む)
レーダ装置及び目標探知方法
【課題】被探知目標を正確に探知する開口合成技術を実現する。
【解決手段】送信アンテナ及び受信アンテナの少なくとも一方として用いられる複数のアンテナ素子から構成されるアレイアンテナを含み、各受信アンテナから送られる信号を開口合成することにより被探知目標を探知するレーダ装置が、当該アレイアンテナのうち空間位相が等しくなる送信アンテナ及び受信アンテナの複数の組み合わせの中の少なくとも1つの組み合わせにおける受信アンテナから送られる信号の包絡線成分を取得する包絡線検波部と、この包絡線検波部により取得された包絡線成分に基づいて上記組み合わせ間の補正量を決定する決定部と、この決定部で決定された補正量を用いて、上記各受信アンテナから送られる信号の位相を開口合成処理の前に補正するか、又は、他の組み合わせにおける送信アンテナから放射される信号の位相を補正する補正部と、を備える。
(もっと読む)
位置推定装置およびプログラム
【課題】無線信号を送信する送信装置の位置を高精度で推定することのできる位置推定装置およびプログラムを得る。
【解決手段】入館管理装置20により、RFIDタグ52の位置を送信された無線信号に基づいて推定し、かつ当該推定対象とする領域を撮影するカメラ40によって得られた画像情報に基づいて前記領域に存在する人の位置を導出し、少なくとも推定したRFIDタグ52の位置を入力情報とし、補正後のRFIDタグ52の位置を示す物理量を出力情報とし、当該出力情報の正解情報を用いた学習機能を有するニューラル・ネットワークにより得られた物理量を用いて、推定したRFIDタグ52の位置を補正する一方、位置の推定対象としたRFIDタグ52の所持者が、位置の導出対象とした人とみなされる予め定められた条件を満足した場合に、導出した前記人の位置を示す物理量を前記正解情報としてニューラル・ネットワークを学習させる。
(もっと読む)
レーダ装置およびセンサインタフェース装置
【課題】本発明は、速度センサまたは加速度センサと共に同じ移動体に搭載されたレーダ装置と、これらのセンサの何れかとレーダ装置とのインタフェースをとるセンサインタフェース装置に関し、構成が大幅に複雑化することなく、目標との相対距離が広範かつ急激に増減する状態であっても性能を高く安定に維持できることを目的とする。
【解決手段】波動信号に応じて目標から到来した到来波に基づいて前記目標の速度、距離、位置、性質の何れかの識別を行うレーダ装置であって、前記レーダ装置と共に同じ移動体に搭載された速度センサまたは加速度センサを用いて前記波動信号が送信される方向における前記移動体または前記レーダ装置の速度を特定し、前記速度に応じて前記波動信号に生じるドップラシフトを特定するドップラシフト特定手段を備え、前記レーダ装置は、前記波動信号の周波数を前記ドップラシフトに亘って補正する補正手段を有する。
(もっと読む)
目標検出・追尾装置
【課題】レンジウォーク補償量の誤差を低減するとともに、誤差の低減されたレンジウォーク補償量によるレンジウォーク補償処理により、後段での積分処理の効果を確実なものとし、目標検出性能を向上させた目標検出・追尾装置を得る。
【解決手段】レンジウォーク補償量を算出する際に、極座標系の目標の検出情報から、目標の運動がより実際に近いものとして表現される直交座標系の状態ベクトルを算出し、この状態ベクトルからパルス毎のレンジウォーク補償量を算出することにより、その誤差を低減する。また、誤差の低減された補償量を用いたレンジウォーク補償処理によって信号の積分処理時の積分効果を高め、目標の検出性能を向上させる。
(もっと読む)
画像変化選別装置
【課題】地表面に生じた物理的な変化を対象に、ノイズが残った状態でも変化領域の特徴量抽出および選別対象変化候補領域の限定を行い、選別対象変化であるか否かを判定可能な画像変化選別装置を得る。
【解決手段】変化抽出結果画像のノイズ除去部2と、特徴量抽出部3と、画像をセグメント分割するセグメント生成部4と、セグメント位置調整部5と、セグメントの交差特徴算出部6と、交差特徴に基づくセグメント選択部7と、セグメント変換部8と、交差特徴と変換後セグメントとに基づくマッチング用のテンプレート選択部9と、選択されたテンプレートと変換後セグメントとのマッチング部10と、マッチング結果の適合テンプレートの空間的連続性評価結果に基づき適合テンプレートを選択するテンプレート評価部11と、選択後適合テンプレートTsを空間的に配置した変化選別結果を出力する変化選別部12と、を備えている。
(もっと読む)
レーダ装置、飛翔体誘導装置及び目標検出方法
【課題】ステップ周波数合成帯域レーダのレンジ分解能、複数目標分離性能を損なわずに1パルスをチャープパルスとした合成帯域レーダを実現し、かつ目標の検出を安定して行えるようにした。
【解決手段】FFT部6、圧縮係数乗算部7及びIFFT部8−1にてパルス圧縮を施し、代表値抽出部11−1にて得られたパルス代表値を再変換部12により再度フーリエ変換し、加算部13にてこのフーリエ変換出力を圧縮係数乗算部7の出力から減算し、この減算出力をIFFT部8−2にて逆フーリエ変換して再度パルス圧縮を施して、ピーク検出部9−2及び代表値抽出部11−2によりパルス圧縮後波形のピーク毎のパルス圧縮レンジを検出するようにして、パルス圧縮・代表値抽出部14におけるパルス代表値の演算を二重に行うようにしている。
(もっと読む)
誘導制御装置及び飛しょう体
【課題】誘導飛しょう体に搭載されるレドームの屈折等の影響による目標測角信号の補正を、多くの校正試験用のコストや期間をかけずに行い、高い誘導性能を備えた誘導制御装置を得る。
【解決手段】特定の範囲の測角方向のみに限定して校正を実施し、測角方向が範囲外となった場合には、範囲内となるように誘導飛しょう体の姿勢角を変化させ、その際の姿勢角変化量と測角方向の変化と校正済みの測角方向バイアス値に基づき、動的に任意の測角方向バイアス値を決定するようにした。
(もっと読む)
距離測定装置
【課題】相対距離を高精度で測定するための距離測定装置を安価に実現する。
【解決手段】質問器101から第1の距離測定信号を含む無線信号を発信し、トランスポンダ102の第1のアンテナ25aによって前記無線信号を受信して第1の距離測定信号を再生し、周波数を分周して第2の測定信号を生成し、前記無線信号を前記第2のアンテナ25bによって反射させあるいは吸収させてASK変調した無線信号を再発信し、前記質問器101によって受信して前記第2の測定信号を再生し、前記第1の測定信号を基準として再生した第2の測定信号の位相を測定することによって、質問器101とトランスポンダ102との間の距離を高精度で測定する。
(もっと読む)
処理遅延のリアルタイム較正および報告のための方法およびシステム
本明細書で開示する主題は、第1のワイヤレスデバイスによって送信チェーンおよび受信チェーン処理遅延を推定するシステムおよび方法に関する。 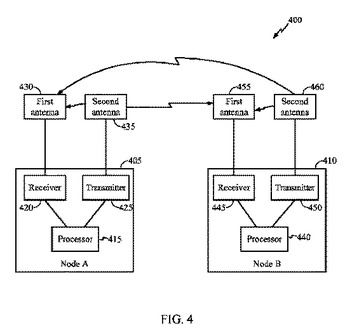 (もっと読む)
(もっと読む)
ICタグ交信範囲表示装置およびICタグ交信範囲表示方法
【課題】ICタグの交信距離の校正を簡易に行って、現場環境と交信範囲との整合をとり、交信範囲を表示する。
【解決手段】予め、リーダライタ1の出力強度を最小にして、リーダライタ1とICタグ3との距離を最大交信距離としたときのICタグ3の最小動作電力Rtsと、そのときにリーダライタ1がICタグ3から受信した応答波の受信電力である基準受信電力Rrwsとを、予め実測しておく。次に、リーダライタの出力強度Prwおよびアンテナ利得Gantを、式(4)に適用して、この出力強度Prwのときの推定最大交信距離D’maxが算出される。また、受信電力Rrwと基準受信電力Rrwsとを式(5)に適用して、補正距離dが算出される。そして、アンテナ2とICタグ3との交信距離Dが、式(6)を用いて算出される。
(もっと読む)
自動追尾レーダ装置および自動追尾方法
【課題】雑音帯域幅の狭い追尾ループでの追尾を可能とし、追尾限界となるS/N比を改善することが可能な自動追尾レーダ装置を提供する。
【解決手段】ロケットやスペースデブリ等の飛翔体を自動追尾する自動追尾レーダ装置として、前記飛翔体を初期捕捉して、自動追尾モードに移行した以降において、アンテナ指向追尾系ループのアンテナ指向誤差検出器16、積分器17および距離追尾系ループの距離誤差検出器23、積分器24にて検出されたアンテナ指向誤差および距離誤差に基づき、アンテナ追尾ループフィルタ18および距離追尾ループフィルタ25それぞれにて生成されるアンテナ指向角度の制御情報および受信タイミングの制御情報を、予見情報(角速度、各加速度)加算器27および予見情報(速度、加速度)加算器26にて、前記飛翔体の軌道予測値、他のレーダ装置の追跡情報または過去の追跡データに基づく予測値である予見情報を用いてさらに補正する。
(もっと読む)
レーダ装置
【課題】 大規模なフェイズドアレイアンテナ装置において、フィールド内で温度差が発生する場合において、アンテナ装置までのケーブルの位相を測定及び補償することが可能なレーダ装置を提供する。
【解決手段】 複数の素子アンテナにそれぞれ接続され、送信波及び受信波を伝送する複数の伝送線路と、複数の移相器と複数の素子アンテナとの接続をそれぞれ短絡へ切り替え可能な複数の接続・短絡切替部のうち、少なくとも一つが短絡側へ切り替わったときに、短絡された伝送線路以外の複数の伝送線路を伝送する各信号の位相を、短絡された伝送線路に対応する移相器以外の、複数の移相器の移相量を制御し、順次、位相を変更させる位相設定部と、波源からの送信波が複数の接続・短絡切替部による短絡で生じた反射波を含む波源からの送信波の反射波を、順次、蓄積していくデータ蓄積部が所定回数蓄積した反射波のデータの加算値から位相を補償する。
(もっと読む)
ドップラーレーダ装置及びドップラー速度算出方法
【課題】干渉波による影響を除去してドップラー速度を算出する。
【解決手段】 IQ検波部171は、観測対象から反射された受信波の直交検波を行い、同相成分と直交成分を時系列で生成する。干渉波除去部172は、受信波に干渉波が混入しているか否かを、同相成分の時系列データ及び直交成分の時系列データに基づいて判定し、受信波に干渉波が混入していると判定した場合に、同相成分及び直交成分によって指定される受信波ベクトルの偏角の時間変化が連続性を維持するように、当該受信波ベクトルを補正する。ドップラーレーダ信号処理部173は、干渉波除去部172によって補正された受信波ベクトルの偏角の時間変化量に基づいて、観測対象のドップラー速度を算出する。
(もっと読む)
目標追跡装置
【課題】追跡精度を向上させることができる目標追跡装置を提供する。
【解決手段】外部から入力される目標の状態ベクトルに基づいて、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出する補正情報算出部5aと、パッシブセンサからの測角データと補正情報算出部からの補正情報とに基づいて、該パッシブセンサを中心とする座標系における目標の航跡を算出する追跡処理部2aを備える。
(もっと読む)
81 - 100 / 350
[ Back to top ]