
Fターム[5J070AK04]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 検出値の補正 (378)
Fターム[5J070AK04]の下位に属するFターム
温度補正 (28)
Fターム[5J070AK04]に分類される特許
101 - 120 / 350
気象レーダシステムとその降水強度算出方法及びプログラム

【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を同時に送信し、その反射波を受信する送受信装置11〜16と、送受信装置の受信信号から二重偏波観測を行って偏波毎の受信電力を算出する信号処理装置17とを備える気象レーダシステムにおいて、データ変換装置19は、受信電力をもとにレーダ波のビーム幅及びパルス幅に基づく高分解能でレーダ反射因子(Z)を算出し、受信電力の偏波間位相差(φDP)をもとに低分解能で比偏波間位相差(KDP)を算出し、比偏波間位相差(KDP)をもとに低分解能領域毎の平均降水強度(Rave[mm/h])を算出し、平均降水強度(Rave[mm/h])とレーダ反射因子(Z)とをもとに、レーダ反射因子(Z)と降水強度(R[mm/h])との間の関係式を推定し、関係式を用いて高分解能の降水強度(R[mm/h])を算出する。
(もっと読む)
パルス圧縮における送信波形生成方法、送信波形生成プログラム及び送信波形生成方法によって製造されたパルス圧縮装置

【課題】S/Nの損失が少なくかつサイドローブレベルをより一層に低下させることができるパルス圧縮における送信波形生成方法を提案する。
【解決手段】レンジサイドローブが所望のレベルとなるパルス圧縮波形のフーリエ変換の波形をP(f)とし、リニアチャープ波のパワースペクトル密度の波形をP’(f)としたときに、リニアチャープ波形に基づき、そのチャープ率c(t)がP’(f(t))/P(f(t))に比例するようなノンリニアチャープ波形を算出し、波形の立ち上がりと立下りを抑圧させる窓関数w(t)を乗じ、さらにその波形をフーリエ級数展開し、その振幅スペクトルが波形P(f)の振幅スペクトルとなるように補正し、それを逆フーリエ変換したものを送信波形とする。
(もっと読む)
レーダ波浪解析装置
【課題】波浪情報の解析精度を向上する。
【解決手段】レーダ波浪解析装置10は、レーダ12の回転により得られる海面反射信号に対して2次元FFT処理を行うことにより2次元の波浪スペクトルを求める2次元演算手段16と、レーダ12の観測領域30での水深dに基づき作成され、観測領域30での浅海変形の影響を受けた海面反射信号に対応する波浪スペクトルを補正するための補正マップ20と、2次元演算手段16から出力された波浪スペクトルを補正マップ20で補正し、補正後の波浪スペクトルに基づいて観測領域30での波浪情報を取得する波浪情報取得手段25とを有する。
(もっと読む)
レーダ装置
【課題】本発明は、単純パルスレーダ方式およびパルス圧縮レーダ方式が併用され、広範なレンジにおいて目標の検出を実現するレーダ装置に関し、構成が大幅に変更されることなく、擬像の発生が確度高く安定に回避されることを目的とする。
【解決手段】パルス圧縮レーダ方式に供される第一の送信波と単純パルスレーダ方式に供される第二の送信波とを交互に送信する送信手段と、前記第一の送信波と前記第二の送信波とに対する反射波が目標から到来した時刻に基づいて、前記目標を検出する目標検出手段とを備え、前記送信手段は、前記第一の送信波の末尾と、前記第一の送信波の後に送信される前記第二の送信波の先頭との時間軸上における間隔を切り替える。
(もっと読む)
レーダ装置
【課題】物体の左右方向及び上下方向の少なくとも一方の位置を正確に検出することの可能なレーダ装置の提供。
【解決手段】レーダ装置100は、左右方向に配列され、少なくとも一部が上下方向にずれて配設された複数(ここでは、3個)の素子アンテナ(21、22、23)を有する受信アンテナ2と、位置検出ECU(5)と、を備える。また、位置検出ECU(5)は、前記複数の素子アンテナ(21、22、23)で受信された受信信号の位相差に基づいて、物体TGの上下方向位置P1を検出する第1位置検出部53と、上下方向位置P1の履歴に基づいて、該上下方向位置P1を補正して、補正後の上下方向位置である第1補正位置P1Aを求める第1位置補正部(54)と、を備える。
【選択図】図2 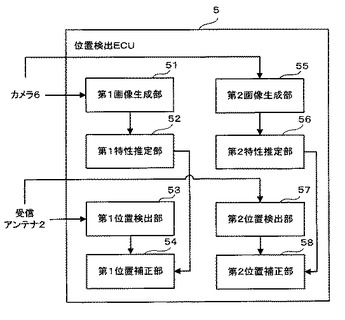 (もっと読む)
(もっと読む)
対象物の位置測定装置
【課題】簡素化・小型化しても高精度で距離を計測できる対象物の位置測定装置を提供する。
【解決手段】送信信号が反射器により反射され、直接波及び反射面で反射する反射波で伝搬し、合成波を離隔して設けられた2つの受信アンテナで受信し、2つの受信信号のうち大きな信号強度を有する受信信号を選択し利得制御部を介して出力する。位置演算回路300は、利得制御部の利得量に対する位相量が測定されてなる補正テーブルを用いて、受信信号から直交検波してなる直交ベースバンド信号に対して、利得量及び当該利得量に対応する位相量を補正し、これに基づいて距離を演算し、演算された距離及び選択された受信アンテナの情報に基づいて、2つの受信アンテナに対応して距離に対する合成波の受信位相を計算されてなる補正テーブルを用いて合成波の受信位相を得て補正された直交ベースバンド信号を再補正し、これに基づいて距離を再計算する。
(もっと読む)
高分解能信号処理装置および高分解能信号処理方法
【課題】従来の高分解能信号処理は、距離や角度等の所望の諸元を精度良く算出できるが処理負荷が大きく、実装ではメモリや演算回路のコストが大きくなり、演算精度を落とすと、桁落ちやオーバーフローが発生し、解が期待値からずれるため、高分解能処理で生じる演算結果のずれを補正し、正確な演算結果を得る。
【解決手段】受信した時間次元の信号を時間方向フーリエ変換部で周波数次元にフーリエ変換し、周波数次元の信号から、所望信号検出部で検出した所望の信号を用い、共分散行列生成部で高分解能処理用共分散行列を生成し、高分解能処理部で、共分散行列を入力として算出した所望信号の到来角度を、信号対雑音比と算出角度に対する補正値の対応を格納する補正処理用データベースを参照して、信号対雑音比計算部で計算した所望信号の信号対雑音比をもとに、補正処理部で補正する。
(もっと読む)
多重チャンネル受信機システムと多重チャンネル受信機監視方法
多重チャンネル受信機システム(10)は、第1の複数の受信回路(12、14)と、アップコンバージョンミキサー(38)とを備え、各受信回路は、第2の複数の入力ラインの対応する1つに接続された第1の入力と、局部発振信号を提供するように構成された局部発振器(28)に接続された第2の入力と、第4の複数の出力信号の対応する1つを提供するように構成された出力とを有し、各入力ラインは、第3の複数の受信信号の対応する1つを提供するように構成され、アップコンバージョンミキサーは、基準信号(42)を受信する第1のミキサー入力(40)と、局部発振器に接続された第2のミキサー入力(44)と、第5の複数の方向性結合器(48、50)にアップコンバートされた基準信号を提供するミキサー出力(46)とを有し、第5の複数の方向性結合器の各方向性結合器は、第2の複数の入力ラインの対応する1つに接続される。 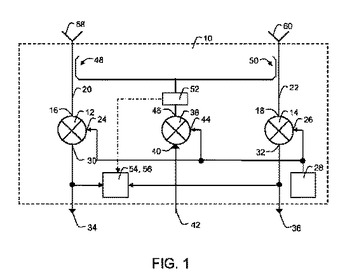 (もっと読む)
(もっと読む)
レーダ装置
【課題】陸や物標からのエコーを残し、雨雪反射のみを良好に抑圧することができるレーダ装置を提供する。
【解決手段】レーダ装置は、自動利得制御部10を備えている。自動利得制御部10は、データ抽出部11と、閾値算出部12と、利得制御部13と、を備えている。データ抽出部11は、受信信号をサンプリングした受信データ系列の中から、信号レベルが距離方向でランダムに変動する受信データを、陸及び物標からのエコーを含まない受信データである雨雪/ノイズデータとして抽出する。閾値算出部12は、前記雨雪/ノイズデータに基づいて、雨雪反射及び受信機雑音を除去するための雨雪反射等除去閾値を算出する。利得制御部13は、前記受信データの信号レベルと、雨雪反射等除去閾値と、を比較し、信号レベルが雨雪反射等除去閾値以上の受信データのみを選択して出力する。
(もっと読む)
レーダ装置
【課題】レーダの反射波が飽和していても物標を適正に探知可能にすることを課題とする。
【解決手段】電波の反射波で物標を探知するレーダ装置1であって、反射波を受信する信号処理部10と、信号処理部10から得た信号をフーリエ変換して物標を探知する演算処理部2と、を備え、演算処理部2は、信号処理部10から得た信号の波形の一部が飽和している場合、飽和していない有効な部分の波形に基づいて生成した近似式を使って飽和している部分を補間し、波形を補間した信号をフーリエ変換して物標を探知する。
(もっと読む)
干渉信号補正を行うレーダセンサ
本発明は、受信信号と基準信号とを混合する混合器(12)と、当該混合器を過励振しうる干渉信号(SE)を補正する素子と、を備えたレーダセンサであって、干渉信号を補正する素子は、混合器(12)の基準入力口(18)に、調整可能な反射点(22)を有することを特徴とする、上記レーダセンサに関する。 (もっと読む)
移動目標検出装置
【課題】地上面を低速度で移動する移動目標をより確実に検出することができる移動目標検出装置を得る。
【解決手段】所定の観測時間差を有する第1の観測地点及び第2の観測地点における観測時期を設定する観測時期設定手段20と、アンテナから取得された2枚のSAR画像を格納するデータ格納部40a、40bと、データ格納部に格納された2枚のSAR画像間の位相差をそれぞれ算出する位相差算出手段50a、50bと、第1の観測地点の位相差から、移動目標の第1の位置および移動速度を特定するとともに、移動目標が移動速度で第2の観測地点まで移動した際の第2の位置を推定する移動目標位置推定手段60と、第1の位置における位相差と、第2の位置における位相差とが、ともに所定閾値よりも大きい場合に、移動目標を真の移動目標と判断する移動目標検出手段80とを備える。
(もっと読む)
ミリ波イメージングシステムとその撮像方法
【課題】ミリ波透視スキャナの撮像幅が狭く、隠蔽された検知対象物の形状を特定することが困難である場合に、撮像領域を拡大して視認性を向上させることができるミリ波イメージングシステムを提供する。
【解決手段】本発明は、特定の形状の光学反射板20を被測定物16の表面に長手y方向がスキャナ2の移動x方向と直交する向きにして貼り付け、スキャナ2に光学検出器30を設け、被測定物表面の光学反射板を含む線分xiに沿ってスキャナを移動させることによりビーム強度スキャン測定と光学検出器による光学強度スキャン測定とを同時に行い、スキャナの走査移動距離dを算出すると共に、光学強度スキャン測定にて光学反射板の直交方向の幅wを求め、関数関係y=f(w)に基づき直交方向の幅wより長手方向の位置yを算出し、y位置のx方向のスキャン画像を得るミリ波イメージングシステムである。
(もっと読む)
ミリ波撮像装置およびプログラム
【課題】複数のミリ波センサを用いて被写体を撮像するミリ波撮像装置において、ミリ波センサ毎の特性のばらつきによって撮像画像が不鮮明になるのを防止する。
【解決手段】ラインセンサに被写体像を撮像させるのに先立ち、基準となるミリ波を放射するミリ波放射部からのミリ波を受信する準備段階を経て(s110〜s150)、実際に被写体像を撮像する撮像段階へと移行する(s170〜)。準備段階では、ミリ波放射部からのミリ波に基づいてミリ波センサそれぞれの検出値に対する補正値を設定しておき(s150)、撮像段階で被写体像の撮像を開始した以降は、撮像に際してミリ波センサそれぞれに検出される検出値が設定済み補正値で補正される(s190)。
(もっと読む)
レーダ画像処理装置
【課題】軌道差で生じた位相差を除去して、正確にずれ量推定を行う。
【解決手段】互いに異なる軌道から同一の観測対象を観測した複数のレーダ画像を格納するレーダ画像A,B格納部1110,1120と、軌道情報に基づき、軌道差により発生したレーダ画像間の位相補正量を算出する軌道に基づく位相差算出部1230と、位相補正量に基づき、レーダ画像の位相を補正する位相補正部1300と、位相補正したレーダ画像間の相互相関を計算する相互相関計算部1400と、相互相関からレーダ画像間のずれ量を推定するずれ量推定部1500と、ずれ量の推定結果に基づき、レーダ画像同士が互いに重なるようにレーダ画像をずらしてリサンプルするリサンプル部1600と、リサンプル結果を格納する出力格納部1700とを備えている。
(もっと読む)
レーダ装置
【課題】アンビギュイティが発生した場合にも、高精度ドップラー補正を行い、超分解能測距精度の改善を図るレーダ装置を得る。
【解決手段】周波数をステップ状に変えて電波を生成し、目標で反射した電波を受信する送受信系(10、2〜6)と、受信した前記電波に基づいて目標を検出する目標検出処理系(7、20、30)と、目標信号のドップラー周波数がドップラー帯域幅の範囲外に存在することに起因して発生する速度アンビギュイティを考慮して、ドップラー効果に起因する目標信号の位相回転を補正し、補正後の目標信号の送信周波数方向に対する位相変化に基づいて速度アンビギュイティを解き、目標の超分解能測距を行う超分解能処理系(40、50)とを備える。
(もっと読む)
無線端末装置、無線基地局装置、無線測距システム、及び、無線測距方法
【課題】アクティブ方式、セミパッシブ方式を問わず、UWBリーダとUWBタグ間の測距精度を向上すること。
【解決手段】タイミング制御部340は、基地局200から送信されたパルス信号の受信タイミング、及び、受信パルス信号を受信してから、当該受信パルス信号の検波信号に応じて生成される送信パルス信号を送信するまでに要する回路遅延時間の代表値に基づいて、基地局200から送信されたパルス信号の検波信号に応じて生成された再放射パルス、及び、再放射パルスの検波信号に応じて生成された再々放射パルスを、送信増幅器350が増幅するようなオンオフ制御する制御信号を、送信増幅器350に出力する。
(もっと読む)
障害物検出装置
【課題】道路構造物を障害物として誤検出することを防止可能な障害物検出装置を提供する。
【解決手段】障害物検出装置1は、ECU2、実測データ生成部3および車両状態計測部4を備える。ECU2は、データベース5、予測データ生成部6および障害物検出部7を有する。実測データ生成部3は、車両周辺の所定領域に存在する物体からのレーダ反射に基づいて物体を検出し、検出結果を示す実測データを生成する。データベース5は、所定領域に存在する道路構造物に関する道路構造物データをあらかじめ保持する。車両状態計測部4は、車両の現在位置および現在姿勢を含む車両状態を計測する。予測データ生成部6は、車両状態および道路構造物データに基づいて、道路構造物からのレーダ反射を予測して予測結果を示す予測データを生成する。障害物検出部7は、実測データおよび予測データに基づいて障害物を検出する。
(もっと読む)
気象レーダ装置及び気象観測方法
【課題】三次元気象データを時間及び空間的に高解像度で収集すること。
【解決手段】気象レーダ装置は、レーダパルスを送信し、反射パルスを受信する複数のアンテナ素子を鉛直方向に配列したアクティブフェーズドアレイ方式のアンテナユニット11と、仰角方向の観測範囲を複数の観測仰角に分割し、各観測仰角を複数の領域に区分し、互いに隣接しない複数の領域のセットをパルス送信繰り返し間隔(PRI:Pulse Repetition Interval)に割り当て、前記セット内の各領域に対して前記仰角方向にファン形状の送信ビームをそれぞれ形成する送信ビームユニット12と、前記複数の領域のそれぞれに対してペンシル形状の複数の受信ビームを形成する受信ビーム形成ユニット21とを具備する。
(もっと読む)
障害物認識装置及び車両制御装置
【課題】車載カメラとミリ波レーダとのセンサ情報から取得するセンサ情報の組み合わせ精度を向上させて、より正確に障害物の認識をする障害物認識装置を提供する。
【解決手段】複数のセンサ情報を組み合わせて障害物の認識を行う障害物認識装置であって、障害物に関する第一パラメータ情報を取得する前方カメラ201と、障害物に関する第二パラメータ情報を取得するミリ波レーダ202と、前方カメラ201で取得した第一パラメータ情報とミリ波レーダ202で取得した第二パラメータ情報とに基づき、前方カメラ201又はミリ波レーダ202の方位角の軸ずれ量を算出し、算出された軸ずれ量に基づいて前方カメラ201又はミリ波レーダ202の軸ずれを補正する補正部203aと、軸ずれ量を記憶する記憶部203cとを備える。
(もっと読む)
101 - 120 / 350
[ Back to top ]