
Fターム[5J070AK04]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 検出値の補正 (378)
Fターム[5J070AK04]の下位に属するFターム
温度補正 (28)
Fターム[5J070AK04]に分類される特許
141 - 160 / 350
レーダシステム、及び移動体
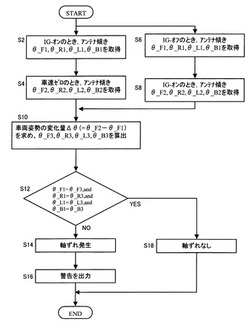
【課題】 車体の傾きを検知する手段を特に設けなくても、レーダシステムにおけるレーダ装置の軸ずれを検出する。
【解決手段】 車両に搭載されるとともに地軸に対するアンテナの傾きを検出するセンサを有し、前記傾きが基準角度になるように調節される複数のレーダ装置と、前記レーダ装置相互で前記傾きの変化量が一致するか否かを判定し、前記変化量が一致しないときには警告出力を行う制御部とを有するので、移動体にその傾きを検知するセンサを設けなくても、レーダシステムに含まれるレーダ装置の軸ずれを検出することができる。
(もっと読む)
位相補償のための集積回路、通信ユニット、および方法
通信ユニット(200)は、コントローラ(217)と、一連の増幅段(330,332,334)の各々と動作可能に接続された複数の遅延要素を有する無線周波数信号経路と、を備え、コントローラ(217)は、増幅段(330,332,334)の各々をそれぞれ活性化するように構成される。活性化させることに応じて、複数の遅延要素のうちのいくつかの遅延要素が選択的に無線周波数信号経路に挿入され又は無線周波数信号経路からバイパスされて、無線周波数信号経路を介して供給される信号に適用される位相シフトを調整する。 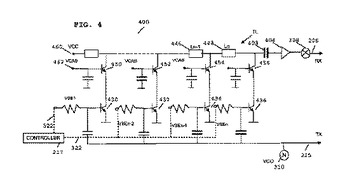 (もっと読む)
(もっと読む)
植生生育状況解析方法、プログラムおよび植生生育状況解析装置

【課題】人工衛星等の飛翔体から得られるレーダ画像を利用して、多時期の植生の生育状況を正確に解析できるようにする。
【解決手段】飛翔体に搭載されたレーダ装置で複数の時期に撮影された、同一対象エリアの地表面のレーダ画像を取得し、取得された複数のレーダ画像を地図データベースに保存する。次に、所定時期に撮影されたレーダ画像を基準画像として、他の時期に撮影されたレーダ画像の位置合わせを行った後、前記レーダ画像の特定領域の後方散乱係数を抽出する。さらに、前記地図データベースに保存された複数のレーダ画像のうち、前記基準画像の特定領域の後方散乱係数を基に、他のレーダ画像の後方散乱係数を較正する。そして、レーダ画像の後方散乱係数と植生の生育値の相関関係に基づいて、前記較正されたレーダ画像の後方散乱係数から当該レーダ画像に写っている植生の生育値を算出する。
(もっと読む)
信号処理装置
【課題】センサでの観測データにより未知パラメータを推定する方法に用いる信号数の推定には、従来、経験則による閾値を用いるため、高精度な未知パラメータの推定ができない。
【解決手段】キュムラント行列演算手段で求めた、センサでの観測データの高次統計量に基づくキュムラント行列から、固有値固有ベクトル演算手段が固有値と固有値に対応する固有ベクトルに分解し、符号判定手段が分解された固有値の符号が反転するときまでの固有値数を検出して信号数を推定し、パラメータ推定手段で、符号が反転するときまでの固有値に対応する固有ベクトルを用いて、未知パラメータを推定する。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】ランダムに検出される検出位置情報に基づいて、正確に物体の進行方向および速度を検出できるようにする。
【解決手段】検出位置特定部81は、検出された物体の検出位置における速度、距離、および角度に基づいて、物体の相対的な検出位置を特定し、含有数カウント部86は、物体の相対的な検出位置を時刻に対応付けて、水平方向の検出位置を示す軸と進行方向の検出位置までの距離を示す軸とで設定される2次元の平面上にプロットし、物体の進行方向の先頭部分が所定時間内に通過すると予想される平面上の形状からなるフレームを所定の回転角度で回転させながら、回転角度毎にフレーム内に含まれるプロットされた検出位置の数をカウントし、方向決定部87は、カウントされたプロット数が最大となるフレームの回転角度に基づいて、物体の存在する存在位置、および進行方向を決定する。本発明は、車両安全装置に適用することができる。
(もっと読む)
信号波到来角度測定装置
【課題】ESPRIT測角処理における誤った測角結果を排除できる信号波到来角度測定装置を提供する。
【解決手段】観測対象の信号波を電気信号に変換するセンサ群2で変換された電気信号から信号波の角度測定に必要な観測データベクトルを生成する観測データベクトル生成部3と、観測データベクトル生成部3により生成される観測データベクトルから信号波の到来角度を算出するESPRIT測角処理部4と、ESPRIT測角処理部4におけるESPRIT測角処理の測角処理過程データから到来する信号波の到来角度以外の情報を推定する到来信号波推定部5と、到来信号波推定部5の推定結果に基づいてESPRIT測角処理部が算出する到来角度の測角結果の正誤を判断して、誤った測角結果を排除する正誤判断部6とを備える。
(もっと読む)
車載用レーダシステム
【課題】
従来技術によれば、リアルタイムでターゲット検知情報の信頼性判断をすることができない、という課題がある。
【解決手段】
当該車載用レーダシステムは、第1の電波を送信する送信手段と、第1の電波がターゲットから反射される第2の電波を受信し受信信号を得る受信手段と、受信信号に基づいて、前記ターゲットまでの距離,相対速度、及び角度を算出する算出手段と、ターゲットまでの距離,相対速度、及び角度を検出できる第一の領域と、ターゲットまでの距離、及び相対速度のみを検出できる第二の領域とを有する第一及び第二のレーダを備え、算出手段は、第一のレーダの有する第二の領域及び第二のレーダの有する第二の領域が重畳する第三の領域において、ターゲットまでの距離,相対速度、及び角度を算出する。
(もっと読む)
レーダ装置
【課題】超分解能測角処理時に、不要な他の信号が混入して誤った方位角が得られることがある。
【解決手段】複数目標との相対距離や相対速度を算出し、超分解能測角処理を行う演算装置13を用いて方位角を測定するレーダ装置において、前記演算装置13は、検出したある目標について、2つの方位角が得られた場合、検出した他の目標の中から、方位角が前記2つの方位角のいずれかに等しく、かつ上昇または降いずれかの変調時にビート信号の周波数が等しい目標を探す他信号検出処理を行い、前記他信号検出処理により、条件を満たす他の目標が検出された場合には、前記検出したある目標の2つの方位角のうち、他信号検出処理により検出された他の目標の方位角と等しい側の方位角を削除するようにした。
(もっと読む)
干渉合成開口レーダシステム、処理方法、指向角度補正装置、指向角度補正方法及びプログラム
【課題】2回の観測間における合成開口レーダの軌道が平行でない場合における観測データ間の相関度を改善する。
【解決手段】地上の解析装置において、合成開口レーダ衛星100の1回目の観測における軌道及び2回目の観測における軌道を算出し、1回目の観測における軌道と2回目の観測における軌道とが成す軌道交差角を算出する。解析装置は合成開口レーダ衛星100に軌道交差角の情報を送信し、合成開口レーダ衛星100は、軌道交差角に基づいてアンテナの指向性の角度を制御する。
(もっと読む)
移動体搭載レーダ装置及びキャリブレーション方法
【課題】被搭載移動体の移動中におけるアンテナ波面のずれを補正する。
【解決手段】レーダ信号処理装置Rにおいて、通常運用前に、既知方位ターゲットに対する方位を測定し、測定結果から各アンテナ素子の方位補正値を算出して記憶回路141に記憶しておき、実運用時に記憶した方位補正値に基づいて各素子の受信信号の位相を制御する。通常運用段階において、既知方位に目標ターゲットを配置してその方向にパルスを放射し、アンテナを介して受信される目標反射信号に基づいて目標からの到来方位を測定し、モジュール補正量算出回路151にて、測定到来方位と既知目標方位との差がゼロになるように、各サブモジュールLiの合成出力の振幅・位相差に対する補正値を算出してメモリ1512に記憶しておき、実運用時にメモリ1512からビーム指向方向に対する各サブモジュールLiそれぞれの機体変形による位相誤差の補正値を求め、波面のずれを補正する。
(もっと読む)
レーダ装置、レーダ装置制御方法、レーダ装置制御プログラムおよびレーダ制御装置
【課題】近距離に位置する対象物までの距離や近距離に位置する対象物の移動速度を計測することができるレーダ装置、レーダ装置制御方法、レーダ装置制御プログラムおよびレーダ制御装置を提供すること。
【解決手段】ビート信号の包絡線を検波することにより、ビート信号を補正するための補正データを生成し、生成した補正データに基づいてビート信号を補正し、補正されたビート信号に基づいて距離計測処理および速度計測処理を行う。
(もっと読む)
二次監視レーダ装置
【課題】給電系が変化した場合において、各チャンネル間の振幅・位相特性の調整を自動で行うことが可能となり、これにより運用における長期間の安定度の確保が可能な二次監視レーダ装置を提供する。
【解決手段】空中線装置3で得られる和パターンΣ及び差パターンΔに代えて、オムニパターンの給電系上のパイロット信号発生回路7で生成される既知の振幅・位相特性を有するパイロット信号をパイロット注入回路8にて和パターンΣのチャンネル及び差パターンΔのチャンネルに注入し、これらチャンネルの試験信号を利用して、振幅/位相検出回路12にて各チャンネル間の信号の振幅差及び位相差を検出し、比較回路14にて予め保持部13に保持されている基準値と比較することで、設置条件の変更等により給電系が変化したか否かを判断し、変化した場合には、変化したことによるチャンネル間の信号の振幅・位相特性を自動で調整するようにしている。
(もっと読む)
レーダ装置及び光軸調整装置
【課題】光軸調整を正確に行う。
【解決手段】レーダ装置1は、平板状のプリント基板11と、予め設定された第1周波数の第1電磁波を送受信するべく、プリント基板11上に形成されたアンテナ111と、プリント基板11上に形成され、レーダ装置1の光軸調整において外部から照射される第2電磁波を反射可能に構成されたミラー113と、を備える。
(もっと読む)
信号処理装置、レーダ装置、車両制御装置、及び信号処理方法
【課題】周波数変化率が異なる複数の周波数変調を用いる場合であっても、検出結果の出力が遅れることを防止する。
【解決手段】周波数変化率が異なる2とおりの周波数変調を用いるFM−CWレーダ装置は、送信信号の周波数変化率が同じビート信号に基づき目標物体の相対距離または相対速度を検出する検出処理と、周波数変化率が異なるときのビート信号同士を用いて相対距離または相対速度を検出する検出処理とを行う距離・速度検出手段と、前記検出処理で検出される相対距離または相対速度に評価点を加算し、前記評価点が基準点に達した前記相対距離または相対距離を確定する距離・速度確定手段とを有するので、1検出サイクル内でより多くのデータを得ることができ、複数の検出サイクルを実行したのと同じ効果が得られる。よって、レーダ装置から車両制御装置への検出結果の出力が遅れることを防止することができる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】車両の前側方監視用レーダ装置において目標物体の位置を精度よく検出する。
【解決手段】 車両に搭載されるとともに前記車両の側方の領域を含む走査領域を走査するレーダ送受信機の信号処理装置は、前記車両の前側方をY軸、前記Y軸と交差する方向をX軸としたときに前記走査領域における目標物体の位置のX、Y座標を検出する位置検出手段と、過去の検出サイクルで検出された前記目標物体の位置の前記検出サイクルあたりのX座標差分値とY座標差分値とに基づき、当該目標物体の位置のX、Y座標を予測する位置予測手段と、前記検出された位置のX、Y座標が前記予測された予測位置のX、Y座標それぞれの許容範囲に含まれるときに、当該検出された位置を確定する位置確定手段とを有するので、X座標の差分値が大きい目標物体の位置を精度良く予測でき、位置検出制度を向上できる。
(もっと読む)
誘導装置
【課題】 従来の合成帯域処理を行う誘導装置においては、相対距離を計測することはできるが相対速度を計測することが困難であり、相対距離の変化率で算出しても時間の変動があるため、精度が低かった。
【解決手段】 従来の合成帯域処理では周波数をf1〜fnに変化させ、相対速度のみを計測していたが、送信パルスの前半部分をf0、後半部分をf1〜fnとし、1つの受信波に対してA/Dサンプリングを2回実施する。その結果、f0のA/D結果に対してFFT処理することでドップラ周波数(相対速度)を算出し、f1〜fnのA/D結果に対して合成帯域処理することで相対距離を算出する。これにより、相対速度と相対距離を同時に計測することができるため、追尾・誘導精度が向上する。
(もっと読む)
目標信号を妨害する装置及び方法
様々な応用分野において、地理的な意味で大きく制限され、無線信号の確実な妨害を保証する無線信号妨害装置を有することが望ましい。本願は、少なくとも1つの通信デバイスへ送信された目標信号を検出する少なくとも1つの検出デバイスと、妨害信号によって目標信号を妨害する少なくとも1つの妨害デバイスと、妨害デバイスを制御するため妨害デバイスへ通信可能に接続される制御デバイスと、少なくとも1つの妨害デバイスを制御する制御デバイスは、妨害デバイス及び/又は通信デバイスの送信電力を決定するための少なくとも1つの入力信号を受け取ることとを備える妨害装置を提供することによって、この問題を解決する。したがって、本発明の背後にある中心的アイデアは、動的な方法で妨害信号を調整することである。かくして、目標信号を送信するデバイスの効率的な妨害は、保証される。 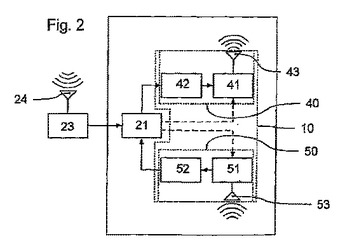 (もっと読む)
(もっと読む)
物体識別装置及び物体識別方法
【課題】歩行者等の人物が計測対象物であっても確実に計測対象物を検出して識別することができる物体識別装置を提供する。
【解決手段】物体識別装置は、電磁波発生器101及び送信器102を用いて送信されて計測対象物OBによって反射した電磁波を受信器103によって受信すると、その受信信号の波形に基づいて、計測対象物OBに電磁波の吸収物が含まれている旨を吸収物検出部107によって検出し、吸収物検出部107によって検出された吸収物を含む計測対象物OBの種類を皮膚判別部108によって判別する。
(もっと読む)
偏波レーダ装置
【課題】効率的な偏波レーダ装置を提供する。
【解決手段】垂直送信アンテナ16から送信する垂直偏波または水平送信アンテナ20から送信する水平偏波の中の一方を他方に比べて遅延させる。この遅延を対象物の位置の移動が無視できる範囲内とする。垂直受信アンテナ22、水平受信アンテナ24で受信され乗算器28,30で得られたビート信号が信号処理部34で周波数解析され、遅延情報に基づいてビート信号周波数が異なることを利用して4つの偏波成分が分離して取得される。
(もっと読む)
物体検出装置
【課題】自車両の挙動が変化した場合でも適切な画像処理領域を設定することができる物体検出装置を提供することを課題とする。
【解決手段】自車両周辺を撮像した画像における特定の画像処理領域に対して画像処理を行い、自車両周辺の物体の情報を取得する物体検出装置であって、自車両周辺の物体の位置情報を取得する位置情報取得手段(S1)と、自車両周辺を撮像する撮像手段と、位置情報取得手段で取得した物体の位置情報に基づいて撮像手段で撮像した画像における画像処理領域を設定する画像処理領域設定手段(S2)と、自車両の挙動の変化を検出する車両挙動検出手段(S3)と、車両挙動検出手段で検出した自車両の挙動の変化に応じて画像処理領域設定手段で設定した画像処理領域を補正する補正手段(S5)を備えることを特徴とする。
(もっと読む)
141 - 160 / 350
[ Back to top ]