
Fターム[5J070AK04]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 検出値の補正 (378)
Fターム[5J070AK04]の下位に属するFターム
温度補正 (28)
Fターム[5J070AK04]に分類される特許
161 - 180 / 350
物体検出装置
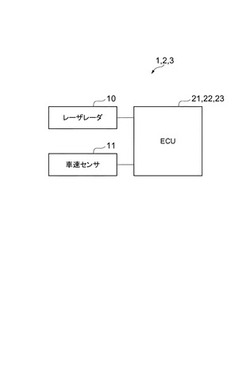
【課題】路面かあるいは路面上の物体かを高精度に判別する物体検出装置を提供することを課題とする。
【解決手段】路面上に存在する物体を検出する物体検出装置1であって、検出対象の物体の候補までの距離を検出する距離検出手段10,21と、自車両の移動量を取得する移動量取得手段11,21と、距離検出手段10,21によって複数の時刻でそれぞれ検出された物体の候補までの各距離と移動量取得手段11,21によって複数の時刻でそれぞれ取得された自車両の各移動量に基づいて、当該物体の候補が路面か又は路面上の物体かを判定する判定手段21とを備えることを特徴とする。
(もっと読む)
物体検出装置

【課題】複数の移動物体が近接している場合であっても、各移動物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、粗決定サーチ関数及び精決定サーチ関数に基づいて、移動物体毎に対応する遅延時間を特定できるか否かの判定を行う時間判定部106と、ステレオカメラ23を介して、複数の移動物体を含む画像を取得する画像取得部108と、遅延時間を特定できないと判定された場合に、取得された画像に基づいて、遅延時間を特定できないと判定された移動物体である特定困難物体に対応する粗決定サーチ関数及び精決定サーチ関数を補正する関数補正部112と、補正された粗決定サーチ関数及び精決定サーチ関数に基づいて、特定困難物体に対応する遅延時間を特定する遅延時間特定部113と、特定された遅延時間に基づいて、特定困難物体との距離を求める距離算出部114と、を備える。
(もっと読む)
レーダ装置
【課題】温度・経年変化に起因する位相・振幅変化による影響をなくせるDBF方式のレーダ装置を提供する。
【解決手段】信号処理手段101は、切替手段50を分配器7側に閉じた時に得られるチャネル毎の送信信号の位相・振幅を検出する位相・振幅検出手段60と、該検出手段60が検出するデータを記憶する記憶手段70と、前記検出手段60のデータ検出期間を制御する検出期間制御手段121と、該制御手段121により設定された期間で検出された新たなデータと記憶手段70に記憶されたデータとの変化分を求める差分値検出手段80と、該検出手段80により求められた変化分を次の変化分検出期間まで記憶する記憶手段90と、記憶手段70および90に記憶されている位相・振幅データに基づいて、受信系統毎の位相、振幅誤差を補正する受信データ信号処理手段111を有する。
(もっと読む)
目標追尾装置、目標追尾方法、及び、プログラム
【課題】誤相関を低減することにより、目標を追尾するのに好適な目標追尾装置、目標追尾方法、及び、プログラムを提供する。
【解決手段】電波を発生する電波発生部と、前記電波を放射し、目標から前記電波の反射波を受信する電波送受信部と、前記反射波を画像信号に変換する信号処理部と、前記画像信号から前記目標を検出する目標検出部と、前記画像信号に基づき、前記目標を表示する表示部と、前記目標検出部が検出した検出結果に基づいて、前記目標を追尾するゲートを発生するゲート発生部と、前記ゲート内に前記目標が存在する場合、前記ゲート外の前記画像信号を分離する信号分離部と、を備え、前記目標検出部は、前記信号分離部が分離した信号に基づき、前記目標を検出する。
(もっと読む)
レーダ装置、補償量算出方法
【課題】複数の送信チャンネル又は受信チャンネルを有するレーダ装置において、装置規模を増大させることなく、送信チャンネル又は受信チャンネル間の特性差を、長期間に渡って安定して補償できるようにする。
【解決手段】2チャンネル分の受信回路を集積した複数の受信用IC42,43を用いてレーダ装置1を構成する。同一チップ(受信用IC)に属する隣接した受信チャンネル間の位相差Δθ12,Δθ34が一致している場合に、単一物標からの反射波に基づく受信信号であるものと判断して、補償量算出用データΔθdの算出を行う。この時、受信チャンネル間の特性差の影響を受けないデータとして、上述の位相差Δθ12,Δθ34を用い、受信チャンネル間の特性差の影響を受けるデータとして、互いに異なるチップに属する隣接した受信チャンネル間の位相差Δθ23を用い、これらに基づいて補償量算出用データΔθd、ひいては補償量Δθhを算出する。
(もっと読む)
マルチスタティックレーダ装置
【課題】パルス間コヒーレント積分を行い、処理量を少なくすることができ、目標検出性能を改善することができるマルチスタティックレーダ装置を得る。
【解決手段】第1の受信ビデオ信号から目標とレーダとの相対速度を算出し、各時刻の相対速度から目標との初期相対速度、相対加速度を算出し、相関演算することにより生成された信号の目標までの距離が同一になるような速度補償量を目標とレーダとの初期相対速度、相対加速度を用いて算出し、速度補償量を用いて第2の受信ビデオ信号の位相を補償し、速度補償された第2の受信ビデオ信号を相関演算する。
(もっと読む)
バイスタティックレーダ断面積の測定装置
【課題】光伝送路で生じる位相変動を補償して、バイスタティックレーダ断面積を高精度に測定することができるバイスタティックレーダ断面積の測定装置を提供する。
【解決手段】レーダ断面積測定部18は、信号発生器11で発生したマイクロ波信号が、光ファイバケーブル3を経由して送信側信号方向制御手段と受信側信号方向制御手段とを往復したときの位相の変化に基づいて、光ファイバケーブル3で生じる位相変動を位相変動量として算出する位相変動量算出手段6を含み、受信アンテナ21で受信されて光ファイバケーブル3を経由して入力されたマイクロ波信号の位相について、位相変動量による補償を行い、補償後の位相を用いて、目標物4のバイスタティックレーダ断面積を測定する。
(もっと読む)
車輌用位置推定装置、車輌用位置推定方法、および車輌用位置推定プログラム
【課題】GPS、自律センサ、マップマッチングなどの従来型自車位置特定手段が有効に機能しない状況において、自車位置を一定の誤差以下の精度で特定可能な自車輌位置推定装置等を提供すること。
【解決手段】車車間通信手段101が現在位置の特定された周辺車輌からの現在位置情報を取得し、自車輌位置補正手段102が該現在位置情報を自車輌位置として記憶するように構成した。これにより、従来型の自車輌位置特定手段が有効に機能していない状況においても車車間通信電波の最大到達距離以下の精度で自車輌位置を特定し得る。
(もっと読む)
レーダターゲットシミュレータ装置
【課題】ターゲットを擬似する電波信号の周波数帯域に依存しないで広帯域化が図れるレーダターゲットシミュレータ装置を得ること。
【解決手段】電光変換器3は擬似信号発生装置2が出力するターゲットを擬似する電波信号と波長可変光源4が出力する光信号とに基づき、擬似信号発生装置2が出力する電波信号を搬送する模擬光信号を生成する。アレー導波路グレーティングファイバ6は模擬光信号を波長に応じて分波し、ファイバアレー7を介して複数の光電変換器8の中の対応するものへ送出する。光電変換器8は受け取った模擬光信号から電波信号を復調して対応するアンテナ素子9に出力する。つまり、ターゲットを模擬する電波信号をアンテナ素子まで光信号で搬送する過程で、その搬送波となる光信号の領域にてターゲットの移動模擬を制御する。ターゲットを擬似する電波信号の周波数帯域に依存しないで広帯域化が図れる。
(もっと読む)
電波探知装置
【課題】コーニングエラーに対して、フェイズドアレイアンテナを回転せずに方位精度を高めることを可能にする。
【解決手段】予め仰角ごとに測定したフェイズドアレイアンテナのコーニングエラーに因る真の方位と推定方位間の方位差を、真方位算出用データベースに格納しておき、アンテナアレイ面を基準方向に向けて設置したフェイズドアレイアンテナとマルチアンテナのそれぞれで受信した到来電波から目標の周波数、パルス幅、パルス繰り返し周波数、パルス到達時刻、推定方位を検出し、両アンテナによる目標の周波数、パルス幅、パルス繰り返し周波数、パルス到達時刻について相関処理を行い、相関が取れた目標の推定仰角を真方位算出用データベースの仰角と照合して対応する方位差を抽出し、抽出した方位差に基づいて該当目標の推定方位を補正して真の方位を算出する。
(もっと読む)
画像処理装置及び画像処理システム及び画像処理方法及び画像処理プログラム
【課題】能動的に電波を放射するRFIDタグなどを利用して、合成開口レーダの再生画像から特定の位置を容易に検出し、その位置に合わせて再生画像を補正する装置を提供することを目的とする。
【解決手段】画像処理装置510は、合成開口レーダ200からのパルス波に応じてRFIDタグ300aから送信された電波と地表からの当該パルス波の反射波とを反射波データとして反射波データベース501から取得する。そして、RFIDタグ300aから電波により送信された識別子データを反射波データから取得する。また、RFIDタグ300aの識別子データに対応する設置データを位置データベース502から取得し、その設置データにより示された電子基準点400aから位置データを取得する。画像処理装置510は、反射波データに基づいて地表の画像を生成し、位置データに基づいて当該画像を補正する。
(もっと読む)
レーダ模擬信号発生器
【課題】 局部発振器のリーク信号の影響を受けることなく模擬信号のダイナミックレンジの拡大を図ることができるレーダ模擬信号発生器を提供する。
【解決手段】 波形データ発生器1はIデータとQデータから得られる最大振幅値を最大振幅検出回路9で検出して出力する。この最大振幅値のデータをミクサ5a,5bで局部発振信号により周波数変換し、混合器6で混合し、帯域通過フィルタ7でろ波し、増幅器8で増幅する。振幅補正演算回路10は最大振幅値とIデータ及びQデータの振幅値とから振幅補正値を演算し、振幅制御回路12はこの振幅補正値に基づいて増幅器8から出力する高周波信号を振幅制御して模擬信号を出力する。高周波信号のレベルを局部発振器のリーク信号のレベルよりも高くでき、模擬信号に対するリーク信号の影響を解消し、模擬信号のダイナミッグレンジを拡大する。
(もっと読む)
レーダ装置、及び方位角検出方法
【課題】異なる周期で動作する画像認識装置からの検出位置を用いて、レーダ装置により物標の方位角を精度良く検出する。
【解決手段】レーダ装置に、前記探索領域の撮影画像に基づいて第1の周期ごとに前記物標の位置を検出する画像認識装置から、当該検出された検出位置が入力される入力手段と、複数の前記入力された検出位置に基づいて、前記第1の周期より短い第2の周期ごとに前記物標の方位角を推定する方位角推定手段と、前記探索領域のうち、前記推定された推定方位角付近では第1の方位角刻み、それ以外の範囲では前記第1の方位角刻みより大きい第2の方位角刻みで前記物標の方位角を検出する方位角検出手段とを備えることで、物標の方位角を精度良く検出できる。
(もっと読む)
試験装置および試験方法
【課題】電波信号を受信して反応する電子装置の通信限界距離を高精度で簡単に求めることができる試験装置および試験方法を提供する。
【解決手段】RFIDタグに対して電波信号を発信するストリップラインセルにその電波信号に相当する電気信号を供給する、固有の出力特性を有するリーダライタに出力レベルを指定する制御装置300において、RFIDタグにおける反応の有無を確認するレスポンス解析部310と、リーダライタに指定した出力レベルから、そのリーダライタの出力特性を用いてRFIDタグで受信される電波信号の電界強度を求め、その電界強度を、所定のアンテナが所定の出力で電波信号を発信してRFIDタグがその電界強度と同じ電界強度で受信する状況におけるそのアンテナとそのRFIDタグとの距離に換算する距離計算処理部312とを備えた。
(もっと読む)
車両用物体認識装置
【課題】横方向に移動する物体に関してピーク周波数探索範囲を適切に設定すること。
【解決手段】電磁波放射受信手段が受信した反射波のデータについてピーク周波数探索範囲を設定し、ピーク周波数探索範囲においてFM−CW方式におけるビート周波数を特定することにより物標との距離及び横位置を含む物標位置データを算出する物標位置データ算出手段と、物標位置データ算出手段が算出した物標位置データに基づいて車両周辺の物体を認識する物体認識手段と、を備える車両用物体認識装置であって、物体認識手段の物体認識は、物体の横位置を予測する処理を含み、物標位置データ算出手段は、物体認識手段が予測した物体の横位置に基づきピーク周波数探索範囲を当初設定し、物体認識手段が予測した物体の横位置と自己が算出した物標の横位置との比較に基づきピーク周波数探索範囲を補正することを特徴とする。
(もっと読む)
レーダ装置および受信レベルの補正方法およびプログラム
【課題】周囲温度の変化に影響されない、小型・軽量、低消費電力、高感度であるレーダ装置および受信レベルの補正方法を実現する。
【解決手段】送信機からアンテナを介して空中に放射されるべき電波の一部が受信機側に回り込んで発生する送信信号の漏れの強度に応じて受信信号のレベルを補正する受信レベル補正手段を備える。
(もっと読む)
レーダ装置
【課題】目標の構造や姿勢によらず、画素欠落の少ない、正確な目標画像を取得可能にする。
【解決手段】所定の観測時間内で異なる時刻ごとに観測したレーダ受信信号から時刻別のISAR画像を順次生成するISAR処理手段と、生成された時刻別のISAR画像を格納する複数の画像メモリと、複数の画像メモリに格納された時刻別のISAR画像から目標の特徴点をそれぞれ抽出する複数の特徴点抽出手段と、抽出されたそれぞれの目標の特徴点の相関をとり、レンジ方向、ドップラー方向の補正値を算出する相関処理手段と、算出されたレンジ方向、ドップラー方向の補正値に基づいて、複数の画像メモリ内に格納された時刻別のISAR画像それぞれを補正する複数のレンジ・ドップラー補正手段と、補正された各ISAR画像を積分する積分手段を備える。
(もっと読む)
レーダシステム
【課題】目標を安定して追尾することが可能なレーダシステムを提供する。
【解決手段】Xバンドのレーダ映像中に偽像又はクラッタが存在し、さらに、各ARPA装置8a、8bが同一の目標をそれぞれ追尾している場合に、追尾部17bの目標追尾部26は、Sバンドの目標の位置を指示機16aに送信し、指示機16aの追尾位置比較部44は、受信した指示機16bからの目標の位置と、追尾部17aの目標追尾部26からのXバンドの目標の位置との差分を求め、前記差分が所定の閾値を上回るときに前記差分を追尾部17aの目標追尾部26に出力する。該目標追尾部26は、前記差分を用いて目標の位置を補正する。
(もっと読む)
電子走査式レーダ装置
【課題】電子走査型レーダにおいて簡易な構成で干渉抑圧が可能な、電子走査式レーダ装置の提供
【解決手段】サンプリングされたビート信号RDを、各アンテナ素子について時間方向に複数の短時間データSDに切り出す。短時間データSDの周波数スペクトルから、干渉波の干渉成分周波数を検出する。検出された干渉成分周波数における周波数スペクトル成分に基づいて、干渉成分の位相補正テーブルを生成する。位相補正テーブルに基づいて各チャンネルの受信データの干渉成分の位相を揃える。位相が揃った各チャンネルの受信データから、その直流成分を除去して干渉方向成分を抑圧する。干渉方向成分が除去された各チャンネルの受信データの位相を元に戻す。
(もっと読む)
検知システムおよび検知方法
【課題】遮蔽物の有無に影響されず安定した動作と狭い範囲に限定した検知を可能とした検知システムおよび検知方法を提供する。
【解決手段】送信部1は、CPU3と、RF処理部4と、高周波スイッチ5と、アンテナA6と、アンテナB7と、から構成される。受信部2はCPU8と、RF処理部9と、アンテナC10と、から構成される。送信部1から所定の時間長さで交互に切替えて送信された送信波A12と送信波B11を受信部2により受信し、送信波A12と送信波B11の両者の受信強度の差分に基づいて受信部2が所定の範囲内に位置しているか否かを判定する。
(もっと読む)
161 - 180 / 350
[ Back to top ]