
Fターム[5J070AK04]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 検出値の補正 (378)
Fターム[5J070AK04]の下位に属するFターム
温度補正 (28)
Fターム[5J070AK04]に分類される特許
1 - 20 / 350
追尾装置
レーダ装置
【課題】測距性能および距離分解能の向上を図ると共に、複数目標を目標の対処を可能にするレーダ装置を得る。
【解決手段】目標があらかじめ設定された範囲内の相対速度および相対距離を有し、相対速度を有する目標のPRI内距離のアンビギュィティを解く第1の条件と、相対距離を有する目標のPRI内の距離分解能が、FMレンジング後の距離分解能よりも高精度となる第2の条件とを備えたパラメータを設定し、設定したパラメータに基づき複数のPRIに渡って周波数変調されたキャリア信号に対してPRIでパルス内変調された送信信号を放射する送信機2を備えた。
(もっと読む)
レーダ断面積計測装置

【課題】直接波や地面反射波などの所望波の他に、不要散乱波がプローブで受信される環境下でも、高精度にレーダ断面積を計測することができるレーダ断面積計測装置を得ることを目的とする。
【解決手段】時間領域変換部32により時間領域に変換された照射電界分布Er(f,H)に対して、時間ゲート幅Twを有する窓関数w(t)を乗算することで、その照射電界分布Er(f,H)に含まれている不要波成分を除去する不要波成分除去部33を設けるように構成している。
(もっと読む)
地物情報判読用画像生成方法
【課題】SAR画像等の単偏波レーダ画像と多偏波レーダ画像とを組み合わせて、より正確な地物情報の判読が可能な合成画像を生成する。
【解決手段】飛翔体に搭載したレーダ装置から得られる、偏波を利用して撮影されたレーダ画像データを基に地物情報判読用画像を生成する際、まずレーダ装置で撮影された地域の低解像度の多偏波レーダ画像データの各々に色情報を割り当てる。次に、その色情報が割り当てられた低解像度の多偏波のレーダ画像データと、レーダ装置で撮影された地域の高解像度の単偏波レーダ画像データを合成し、高解像度のカラーレーダ画像データを得る。
(もっと読む)
車載レーダ装置および車載レーダ装置の制御方法
【課題】環境の変化によらず、対象物を正確に検出する。
【解決手段】車両の周囲の対象物を検出する車載レーダ装置10において、車両の周囲に信号を送信し、対象物によって反射された反射信号に基づいて車両の周囲の対象物を検出する検出手段(演算制御部10a、送信部10b、増幅部10c、送信アンテナ10d、受信アンテナ10e、増幅部10f、受信部10g)と、通信網を介して車両の周辺の状況を示す周辺情報を取得する取得手段(広域通信部10h)と、取得手段によって取得された周辺情報に基づいて、検出手段の検出精度の低下を抑制するように検出手段を制御する制御手段(演算制御部10a)と、を有する。
(もっと読む)
追尾装置
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置を提供する。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、該観測値を取得した機器の動作モードである捜索モード又は追尾モードに応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する座標系制御部から構成される。
(もっと読む)
通信装置およびレーダ装置
【課題】光伝送路の透過位相が変動する場合であっても、各系統に短絡用の切替スイッチを設けることなく、光伝送経路を伝送する光信号の位相を補正することができる通信装置、レーダ装置を得る。
【解決手段】本発明にかかる通信装置、レーダ装置は、複数の光参照信号を生成する参照信号生成部16と、光参照信号が、信号反射部13a、13bで反射して戻ってきた反射信号を各々出力する複数の参照信号出力部12a、12bと、参照信号出力部12a、12bから出力される各反射信号を各々電気信号に変換する複数の光電変換手段24a、24bと、複数の光電変換手段で変換された電気信号間の位相差を求める位相比較手段25と、位相比較手段25で求められた位相差により、複数の光伝送路9a、9bを介して伝送される信号の遅延を制御する遅延制御手段26とを備える。
(もっと読む)
目標追随装置、誘導装置及び目標追随方法
【課題】カルマンフィルタを用いて正確に目標をトラッキングすることが可能な目標追随装置を提供する。
【解決手段】目標追随装置は、レーダ受信機、サンプル選択部及びトラッキングフィルタ部を具備する。レーダ受信機は、イルミネータからの送信波が目標で反射した反射波を受信し、受信した反射波に基づいて目標への角度及び反射波の受信電力を取得する。サンプル選択部は、受信電力の値が、過去の受信電力に基づいて設定される基準値から所定値以上減少しているか否かを判断し、基準値から所定値以上減少している場合、取得した角度及び受信電力を除去し、基準値から所定値以上減少していない場合、取得した角度及び受信電力を出力する。トラッキングフィルタ部は、サンプル選択部から出力される角度及び受信電力に基づき、目標の角度についてのトラックを推定する。
(もっと読む)
受信装置
【課題】本発明は、UWB通信方式を用い、消費電力をより低減し得る受信装置を提供する。
【解決手段】本発明の受信装置Rxは、一定の時間間隔で配列された短パルス波であるウルトラワイドバンド方式の送信信号を送信する送信装置Txから送信された短パルス波が物体に当たって反射した反射波を受信する受信装置Rxであって、受信信号を周波数変換して中間信号を出力する伸長器31と、中間信号から、目的とするパルスの識別および到来時刻識別を行ってパルス検出信号を出力するパルス検出器33と、パルス検出信号に基づいて物体の運動の有無を検出する物体運動検出部とを備え、伸長器31は、受信信号に含まれる短パルス波の発生タイミングに同期して間欠動作する発振器31aを含み、物体運動検出部は、反射波を複数回受信することによって得られた各受信強度の分散値に基づいて前記物体の運動の有無を検出する。
(もっと読む)
レーダ装置、誘導装置及び目標追随方法
【課題】検出した移動速度に速度誤差が含まれている場合であっても、合成帯域レーダで高分解して検出した測定値をMTTで正確にトラッキングすることが可能なレーダ装置を提供する。
【解決手段】レーダ装置は、合成帯域レーダ、速度トラッキング部、誤差算出部、誤差変換部、レンジ修正部及び複数部位トラッキング部を具備する。合成帯域レーダは、目標で反射された反射波を受信し、受信した反射波に基づいて、目標の速度測定値を測定し、目標内の複数の部位毎のレンジ情報を検出する。速度トラッキング部は、過去の速度測定値に基づいて速度推定値を算出する。誤差算出部は、速度推定値と速度測定値との差から速度誤差を算出する。誤差変換部は、速度誤差をレンジ誤差に変換する。レンジ修正部は、検出されたレンジ情報をレンジ誤差に基づいて修正する。複数部位トラッキング部は、修正したレンジ情報に基づいて、目標内の複数の部位毎にトラッキングを行う。
(もっと読む)
移動体ならびにそのビームの方向制御方法
【課題】GPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を計算しなければならない環境下において、送信側移動体が受信側移動体の方向に的確にビームを照射することが可能な移動体通信システムの提供。
【解決手段】ペンシルビームを用いて移動体1〜4間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御部と、受信側移動体が送信ビームを受信し、受信した送信ビームに基づきモノパルス測角を行うモノパルス測角部と、受信側移動体から送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知部とを含み、ビーム制御部は受信側移動体から取得した測角誤差値に基づきペンシルビームの照射方向を補正する。
(もっと読む)
移動体通信システムおよび移動体ならびにそのビームの方向制御方法
【課題】 GPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を計算しなければならない環境下において、送信側移動体が受信側移動体の方向に的確にビームを照射することが可能な移動体通信システムの提供。
【解決手段】 ペンシルビームを用いて移動体1〜4間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御部24と、受信側移動体が送信ビームを受信し、受信した送信ビームに基づきモノパルス測角を行うモノパルス測角部34と、受信側移動体から送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知部35とを含み、ビーム制御部24は受信側移動体から取得した測角誤差値に基づきペンシルビームの照射方向を補正する。
(もっと読む)
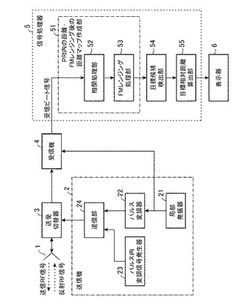
2チャネル追尾装置、および追尾方法
【課題】衛星位置検出の精度の低下を防止する、2チャネル追尾装置および追尾方法を提供する。
【解決手段】追尾装置1は追尾信号から和信号と差信号を生成し、和信号を信号発振器14が生成する変調信号で抑圧搬送波振幅変調を行い、変調和信号と差信号を合成する。和信号と合成信号を増幅し、中間周波数に変換し、伝送する。AGC回路20は和信号を増幅し、AGC回路21は和信号の利得との差分が所定の範囲内になるよう合成信号を増幅する。検波器24と検波器23は、和信号と90°移相した和信号でそれぞれ合成信号を位相検波し、追尾誤差信号の同位相成分と直交位相成分を検出する。同期検波器26と同期検波器25は、同位相成分と直交位相成分を変調信号で同期検波し、伝送された変調信号の同位相成分と直交位相成分を検出し、伝送中の位相変動αと振幅変動Aを算出する。αとAに基づき追尾誤差信号の直流成分を補正し、アンテナ駆動部などに送る。
(もっと読む)
レーダ装置
【課題】少ない演算量で、目標の3次元速度ベクトルを推定することができるレーダ装置を得ることを目的とする。
【解決手段】目標信号検出手段により検出された目標信号のうち、送受信局00及び受信局01,02,10,11の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出する。
(もっと読む)
合成開口を用いるレーダシステム
【課題】合成開口レーダ(SAR)システム、およびSARシステムにおいて信号を処理する方法を提供すること。
【解決手段】SARシステムが、少なくとも1つの部分アンテナを有するレーダアンテナを含み、その少なくとも1つの部分アンテナそれぞれが、割り当てられる送信/受信モジュールを有する複数の位相中心、および位相中心の信号をコヒーレントに処理するための信号プロセッサを含む。信号プロセッサは、位相中心の送信/受信モジュールによって受信されるアナログ受信信号をデジタル化および処理するように、ならびにデジタル的に処理された受信信号をアナログ信号に変換するように構成および配置されるハイブリッドビーム形成モジュールを備える。さらには、アナログ受信ネットワークが、それぞれの送信/受信モジュールのアナログ信号を互いに合成して、出力信号を形成するように構成および配置される。
(もっと読む)
レーダ装置及び干渉波除去方法
【課題】干渉波による影響を除去してパルス圧縮時のサイドローブを低減する。
【解決手段】IQ検波部171は、受信信号を直交検波してIQデータを求める。干渉波除去部172は、IQデータから干渉波の影響を除去する。干渉波除去処理では、同一ヒットでの対象レンジ目の電力値を周囲のレンジ目の電力値に基づいて補正し、同一ヒット間で位相変化が保たれるようにデータ補正が行なわれる。パルス圧縮部173は、位相変調または周波数変調が施された送信パルスの受信信号において、その復調を施す際に変調送信波との自己相関をとることによって送信パルスより幅の短いパルスに変換する処理を行う。このとき、干渉波除去処理において位相状態が保持されているので、パルス圧縮後の出力にサイドローブが発生することを抑制することができる。
(もっと読む)
検出装置及び検出方法
【課題】本発明は従来よりも設計の自由度を向上させた等価時間サンプリング方式の検出装置を提供する。
【解決手段】送信手段(20)は、各送信パルスが所定の送信パルス繰り返し周期内に配置されるパルス列信号であって、各送信パルスの位相を当該送信パルス繰り返し周期内において段階的にシフトした送信パルス列信号を検出波として送出する。受信手段(30)は、反射波を受信して受信パルス列信号を形成し、受信パルス列信号をサンプリングして複数の受信パルスの波形データを出力する。信号処理手段(40)は、複数の受信パルスの各波形データの時間軸を各送信パルスの位相の段階的シフトに対応して調整し、各波形データを合成して一つの受信パルスの波形データを形成する。
(もっと読む)
レーダ画像処理装置及びレーダ画像処理方法
【課題】何らかの原因で強度画像や距離画像内の画素値が異常値になっている場合でも、目標物を検出することができるレーダ画像処理装置及びレーダ画像処理方法を得ることを目的とする。
【解決手段】目標領域検出処理部12が、目標候補画素設定処理部11により設定された目標候補画素と特定物が不明な画素(目標物、背景領域及びクラッタ領域のいずれも構成していない画素)とから構成される和集合の領域の空間的な大きさが、予め設定されている目標物の空間的な大きさと近似しているか否かを判定する。
(もっと読む)
アンテナ配置算出装置
【課題】アンテナを2次元空間や3次元空間に配置する場合でも、サイドローブレベルが最小に近いアンテナ配置を効率よく算出することができるようにする。
【解決手段】アンテナ配置保持部3に記録されている評価値が最も良いアンテナ配置を選択し、そのアンテナ配置が示す位置に配置される複数のアンテナの中で、任意のグループに属しているアンテナを選択するアンテナ選択部6や、アンテナ選択部6により選択されたアンテナの位置を変化させて新たなアンテナ配置を生成し、そのアンテナ配置をアンテナ配置保持部3に記録するアンテナ移動部7などを設ける。
(もっと読む)
追尾装置
【課題】フィルタを簡易に切り替えて早期に目標に追従可能とし、計算量の削減を図る。
【解決手段】等速直線運動モデル、蛇行運動モデル、多重運動モデルに基づくカルマンフィルタを用い、観測値から予測値、予測誤差共分散行列、観測誤差共分散行列および平滑値を算出する各カルマンフィルタ処理手段3〜5と、観測値、カルマンフィルタ処理手段3による各値に基づいて、目標が等速直線運動であるかを判定する等速直線運動判定手段7と、観測値、各カルマンフィルタ処理手段による各値に基づいて、各運動モデルに対する尤度を算出する尤度計算手段6と、各運動モデルに対する尤度および等速直線運動判定手段7による判定結果に基づいて、各運動モデルに対する信頼度を算出する信頼度計算手段8と、各運動モデルに対する信頼度に基づいて、各平滑値の加重平均値を算出する加重平均計算手段9とを備えた。
(もっと読む)
1 - 20 / 350
[ Back to top ]