
Fターム[5J070AK13]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833)
Fターム[5J070AK13]の下位に属するFターム
Fターム[5J070AK13]に分類される特許
21 - 40 / 392
レーダ装置及び監視方法
【課題】航空機の予測位置を正確に特定し、捕捉する。
【解決手段】モードS二次監視レーダは、航空機データ記憶部と、質問生成部と、算出部と、更新部とを備える。航空機データ記憶部は、次のスキャンにおける航空機の位置情報である予測位置を含む航空機データを記憶する。質問生成部は、ロールコール期間において、航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成し送信手段に出力する。算出部は、受信手段がロールコール質問に対して受信した応答に含まれる航空機の位置又はGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出する。更新部は、算出部で算出された予測位置で航空機データを更新する。
(もっと読む)
車両用物体検出装置

【課題】電磁波を用いて物体を検知する場合、路側に存在する物体が誤まって自車の進路に侵入したと誤検知されるのを防止するようにした車両用物体検出装置を提供する。
【解決手段】自車の進路を推定し(S12)、検知された物体が進路の側方に存在する路側物か否か判定し(S14)、推定された進路と路肩との境界線を設定し(S16)、検知された物体が進路の側方に存在する路側物と判定されるとき、物体を構成する点群のいずれかが境界線を越えて自車の進路に侵入したか否か判定し(S18からS22)、点群のいずれかが境界線を越えて進路に侵入したと判定されるとき、物体を障害物と判定する(S24)。
(もっと読む)
判別方法
【課題】ケーブル収容管を内部に配した管路の管内空間を占める物体を判別する。
【解決手段】管路Zの管内空間を占める物体をレーザ探査機50を用いて判別する判別方法であって、前記レーザ探査機50を、管路Zのケーブル収容管30の管軸に沿って移動させながら前記送信アンテナ51から電磁波パルスを送信し、前記送信アンテナ51から送信され、前記支持部材20にて反射した電磁波パルスの反射波を前記受信アンテナ53にて受信し、前記レーザ探査機50のケーブル収容管内における位置Dと、前記電磁パルスを送信してから前記反射波を受信するまでの到達時間差Tを2軸とする位置到達時間差曲線Uを作成し、作成した位置到達時間差曲線Uの特徴に基づいて、前記管路Zの管内空間を占める物体を判別する。
(もっと読む)
埋設物探査方法および埋設物探査装置
【課題】いかなる領域を探査対象として設定した場合であっても、同領域内の埋設物をもれなく適確に探査することができる埋設物探査方法および埋設物探査装置を提供する。
【解決手段】巡回経路決定部31は、設定された探査対象領域と、アンテナ部15の送受信特性とに基づいて、アンテナ部15の送受信点に係る巡回経路を決定する。誘導案内部33は、アンテナ部15の送受信点に係る巡回経路と、アンテナ部15の現在位置に係る情報とに基づいて、アンテナ部15を次の送受信点に誘導案内する。送受信制御部25は、アンテナ部15の送受信点に係る巡回経路に従って、波動の放射および放射された波動の反射波の受信をアンテナ部15に行わせる。埋設物探査部27は、受信した波動の反射波に基づいて埋設物を探査する。
(もっと読む)
踏切障害物検知装置
【課題】周囲温度の変化等にかかわらず踏切道内における障害物の有無を安定して検知することのできる踏切障害物検知装置を提供する。
【解決手段】踏切障害物検知装置1は、踏切道10を含む検知領域内に電波を送信するとともに、この送信した電波に対する反射波を受信する送受信機2,3と、送受信機2,3によって受信された反射波の信号レベルと、あらかじめ設定された閾値とを比較して踏切道10内における障害物の有無を判定する信号処理部6と、を含む。信号処理部6は、送受信器2,3による電波の送信が可能な領域内に存在する特定の固定物(例えば反射板4a,5a)による反射波の信号レベルを監視し、この監視された反射波の信号レベルが変動した場合に送受信器2,3によって受信された反射波の信号レベル又は上記閾値を補正する。
(もっと読む)
マルチラテレーションシステム
【課題】信号の送信タイミングを二次監視レーダの動作に対応させて、二次監視レーダにおける航空機の監視を妨げない。
【解決手段】マルチラテレーションシステムは、応答処理部と、タイミング生成部と、送信部とを備える。応答処理部は、レーダ装置の質問信号に対して航空機が送信した応答信号を入力し、当該応答信号を解析してレーダ装置と航空機との信号の送受信のタイミングを特定する。タイミング生成部は、予め入力されたレーダ装置のアンテナの回転速度と、応答処理部で特定されたタイミングとから、アンテナが航空機と異なる方向を向いているタイミングを航空機への質問信号の送信タイミングとする。送信部は、タイミング生成部で生成されたタイミングで、質問信号を送信する。
(もっと読む)
ホログラフィックレーダ
【課題】物標が移動している場合には、総経路長差に差が生じ、ホログラフィック合成ができないという問題が生じていた。
【解決手段】本発明のホログラフィックレーダは、第1及び第2の送信波を送信する送信部(S)と、第1及び第2の反射波を受信する受信部(R)と、第1の送信波を送信してから第2の送信波を送信するまでの時間間隔である送信周期を変えて、第1及び第2の送信波を複数回送信するように第1及び第2の送信アンテナを制御する送信波制御部(50)と、送信波を複数回送信した場合の物標からの反射波の検出状況から求められる各周波数ピークに含まれる物標の相対速度に基づき、物標が複数であった場合にその相対速度差から最も適している送信時間間隔の送信周期を選択し、選択した送信周期で第1及び第2の送信波を送信した場合の第1及び第2の反射波を合成して物標の検出を行う方位演算部(11)と、を有することを特徴とする。
(もっと読む)
レーダ信号処理装置
【課題】 一定時間間隔でレーダ信号処理装置にデータが入力されるが、レーダ信号処理装置で同時に信号処理可能なデータ数以上の数のデータが入力される場合、信号処理を割り当てる演算部が信号処理中のため割当できず、入力されたデータのシステム的な重要度に関わらず破棄され、その場合にシステム的に重要度が高いデータ破棄されることにより、信号処理ができないことが問題となる。
【解決手段】 レーダ信号処理装置内の信号処理結果から、将来入力されるデータの入力および信号処理時間を予測し、入力されるデータを予測する度に信号処理を実施する演算部の稼働率が向上するように割当を変更することで、データの信号処理終了時刻が早くなり、かつ処理データ数を最大とする計画的な負荷分散制御を行う。
(もっと読む)
目標追跡装置
【課題】等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させた目標追跡装置を得る。
【解決手段】外部から入力される目標の状態ベクトルに基づいて、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出する補正情報算出部5aと、パッシブセンサからの測角データと補正情報算出部からの補正情報とに基づいて、該パッシブセンサを中心とする座標系における複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部2aを備える。
(もっと読む)
レーダ装置
【課題】受信アンテナが受信した位相折り返しゴーストを、ビームパターンの異なる電波を送信することによって判定し、レーダ装置の精度向上を図る。
【解決手段】到来波を複数のアンテナで受信した反射波の位相差から物標の角度を算出して物標位置を検出する電子スキャン方式のレーダ装置において、送信アンテナを2本設けてそれぞれからビームパターンの異なる電波を交互に送信し、2つのビームパターンBP1,BP2による反射波を受信した各受信信号から反射波それぞれの到来角度、受信レベル及びレベル差を算出し、受信された反射波の受信レベル差が、到来角度を合わせた上で所定のレベル差以上か否かを判定し、判定結果に応じて反射波の到来角度に実在しない物標を検出するレーダ装置である。2つのビームパターンは送信軸を左右に傾けることによって実現できる。
(もっと読む)
車両の物体検出装置
【課題】物体の検出精度の低下や誤検出が少なく、認識精度を向上できる車両の物体検出装置を提供する。
【解決手段】ミリ波レーダセンサ4は、車両1の前方の物体2を検知し、送信波と受信波とのビート信号からピーク周波数を検出する。他車情報演算処理部11は、車車間通信又は路車間通信によって取得した他車両3の位置及び速度と、自車位置センサ5及び自車速センサ6によって取得した車両1の位置及び速度とから他車両3と車両1との参照距離及び参照相対速度を求める。判定処理部12は、ミリ波レーダセンサ4が検出したピーク周波数から、参照距離と参照相対速度とに相当するピーク周波数を探索し、探索できた場合は物体2を他車両3と判定する。物体情報演算処理部13は、他車両3と判定した物体2のピーク周波数を除いたピーク周波数から、他車両3と判定した物体2を除く物体2と車両1との距離及び相対速度を演算する。
(もっと読む)
物体認識装置
【課題】車載カメラのような他のセンサをさらに備えることなく低コストに、車載レーダが受信した反射点群のパターンから認識対象の物体を認識できるようにする。
【解決手段】レーザレーダ2が受信した反射点群のパターンの自車両1に対して反対方向に屈曲したL字状部分を分離処理部6により分離し、分離処理部6が分離したL字状部分が一部を構成する矩形に基づき、物体属性推定部8により認識対象の物体を認識する。
(もっと読む)
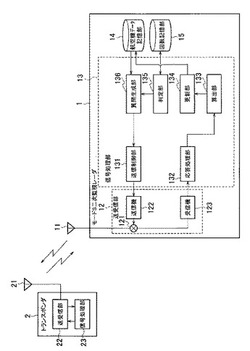
精測進入レーダ、精測進入レーダ制御方法およびその制御用プログラム
【課題】着陸誘導対象機の検出を安定して実施する。
【解決手段】ASR40から取得した追尾目標データDおよびSSR50から取得した追尾目標データEに基づいて進入機情報をレーダ表示手段30に表示し、オペレータによって誘導対象機が選択されると選択された航空機の進入機情報に基づいて目標物検出手段10で検出する対象機のドップラ周波数の予測値および予測位置を追尾管理制御部21が算出し、算出したドップラ周波数が中心周波数となるようなフィルタ係数をフィルタ係数制御部14が算出し、フィルタ係数制御部14が算出したフィルタ係数を目標物検出フィルタ11に設定する。追尾管理制御部21は、電波の送信方向が予測位置に向くように設定された電子走査式アンテナ1を介して電波を出力すると共に電波の反射を受信する。受信した反射波から目標物検出フィルタ11で航空機の反射信号である目標物信号を抽出する。
(もっと読む)
識別タグおよび識別タグセット並びに周波数分割型識別端末および識別方法
【課題】電力利用効率に優れ、構成が簡単で安価に製造できる識別タグおよび識別端末の提供。
【解決手段】識別端末2は問合せ手段であり、発振回路22に特定の周波数f1を設定すると、一次側トランス23でその周波数f1の誘導電磁界230を生成し、誘導電磁界230を介して、一次側トランス23と二次側トランス11とが電磁結合される。二次側トランス11は並列に接続されたコンデンサを有し、共振回路を構成している。この共振回路の共振周波数がf1であるとき、共振回路の出力の電力に基づきLED発光部13が発光する。LED発光部13は逆極性に接続された2つのLEDでなる。発振回路22の発振周波数の選択により、特定の共振周波数を有する識別タグを識別できる。
(もっと読む)
電波発射源検出センサ及び自動料金収受システム
【課題】所定のレーンに設置された路側器と、その隣接レーンに存在する車載器との間で確立された誤通信を中断し、車載器に対する誤課金を防止することが可能な電波発射源検出センサと、このセンサを用いた自動料金収受システムとを提供する。
【解決手段】第1及び第2のレーンに設置され、移動体に所持された応答器と通信を行う第1及び第2の路側器と接続する電波発射源検出センサは、アンテナ部、検波部、方向特定部、誤通信判定部を具備する。アンテナ部は、第1及び第2のレーンを含む受信ビームにより、応答器からの応答信号を受信する。検波部は、応答信号から必要信号を検波する。方向特定部は、検波結果に基づいて、電波強度、到来方向及び応答周波数を取得する。誤通信判定部は、電波強度、到来方向及び応答周波数に基づき、応答器との通信は誤りであるとの旨の誤通信通知を第1及び第2の路側器へ出力する。
(もっと読む)
電磁ミリ波信号照射を使用した物体の検査方法および検査装置
【課題】ミリ波信号を使用して物体を検査する方法を提供する。
【解決手段】少なくとも2つのミリ波信号源を提供し、ミリ波信号源から、少なくとも2つの異なる周波数を有する少なくとも2つのミリ波信号を送信して物体を照射し、反射された帰還信号が閾値信号レベルを超えているか否かを判定する。超えている場合は、その帰還信号を処理して物体の形状を特定する。超えていない場合は、別の帰還信号を処理する。検出される場合は、その帰還相互信号を処理して物体の性質を特定する。検出されない場合は、別の帰還信号を処理するステップとを行う。すべての帰還信号がチェックされたか否かを判定する。結果が満足なものか否かを判定し、結果が満足なものでない場合は、ミリ波信号のうちの少なくとも1つの周波数を変更する。結果が満足なものである場合は、本方法を終了する。
(もっと読む)
走行支援装置
【課題】車両の前進時と後退時とで検知対象とすべき障害物に応じた適切な検知が可能な走行支援装置を提供する。
【解決手段】車両11の前方の障害物を検知するレーダ14と後方の障害物を検知するソナー12とを備え、車両の前進時及び後退時にレーダ14及びソナー12により検知された障害物と車両11との接触を防止するように車両11の走行を制御するPCS ECU20を備えるため、前進時及び後退時の両方で障害物と車両11との接触を防止することが可能となる。また、レーダ14は、ソナー12とは異なる種類のセンサであり、ソナー12よりも車両11から長距離に位置する障害物を検知することが可能であるため、後退時の比較的に低速な速度域と、前進時の比較的に高速な速度域とに応じて、検知対象とすべき障害物と車両11との位置関係に応じた適切な検知が可能となる。
(もっと読む)
レーダ装置及び質問送信方法
【課題】他局のレーダ装置と連携して確実に目標を検出できるようにする。
【解決手段】本実施形態に係るレーダ装置1Aは、自局覆域と一部の覆域が重なる他局のレーダ装置1Bと通信回線を介して接続され、アンテナ11から目標に質問信号を送信し、目標からの応答信号を受信する送受信部12と、他局から目標の位置情報を通信回線を介して取得する通信処理部14と、通信処理部14により取得された目標の位置情報に基づいて上記一部の覆域から一定幅の外側領域に目標が進入するタイミングで質問信号を送信させる質問制御部14とを具備する。
(もっと読む)
方位測定システムおよび方位測定方法
【課題】到来波を受信する装置の大規模化や製造工程の複雑化を回避しつつ、到来波に複数の電波が混信している場合でも、その複数の電波のそれぞれの到来方位を測定する。
【解決手段】到来波を受信する複数の受信局と基地局とを有し、到来波に混信した複数の電波のそれぞれの到来方位を算出する方位測定システムであって、複数の受信局のそれぞれは、到来波に基づく受信信号を独立成分分析法を用いて複数の分離信号に分離して位置情報と時刻情報とを付加して基地局へ送信し、基地局は、付加された時刻情報が一致する複数の分離信号のうちの2つの分離信号の組み合わせのそれぞれに相互相関関数を適用することにより、類似度の高い2つの分離信号の組み合わせを決定し、決定した組み合わせの相互相関関数のピーク値における時間差と、決定した組み合わせのそれぞれに付加された位置情報とに基づいて算出される方位を複数の電波のそれぞれの到来方位とする。
(もっと読む)
航空機位置測定システム、受信局、データ量削減方法およびプログラム
【課題】通信コストの低減と中央局の負荷の低減とを実現する。
【解決手段】複数の種類の信号のそれぞれを航空機へ向けて送信する送信局と、複数の種類の信号のそれぞれに対する複数の種類の応答信号のそれぞれを航空機から受信し、解読処理して測定用データを生成し、生成した測定用データに受信時刻情報を付与して送信する複数の受信局と、複数の測定用データを受信し、それらに付与された複数の受信時刻情報と、複数の受信局のそれぞれの位置情報とに基づいて航空機の位置を測定する中央局とを有する航空機位置測定システムにおいて、送信局は、中央局にて決定された時刻に基づいた時刻に複数の種類の信号のそれぞれを送信し、複数の受信局のそれぞれは、所定の種類の信号を送信する時刻として中央局にて決定された時刻に基づいて時間帯を設定し、所定の種類の信号に対する応答信号を上記の時間帯以外の時刻に受信した場合、当該受信した応答信号を破棄する。
(もっと読む)
21 - 40 / 392
[ Back to top ]