
Fターム[5J070AK13]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833)
Fターム[5J070AK13]の下位に属するFターム
Fターム[5J070AK13]に分類される特許
101 - 120 / 392
物体認識装置
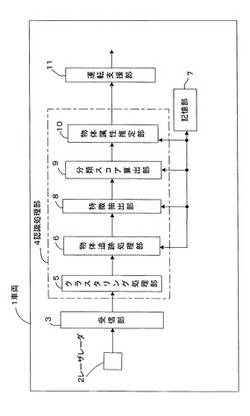
【課題】車載レーダの反射の検出パターンから車両、自転車、人(歩行者)等を区別して精度よく認識する新規な物体認識装置を提供する。
【解決手段】特徴抽出部8、分類スコア算出部9により、フレーム毎のレーザレーダ2の反射の検出パターンを、物体毎に用意した複数の特徴パターンのいずれかに分類し、さらに、物体属性推定部10により、段の時系列の複数フレームのパターン認識の分類結果を累積することで、物体の移動の方向や姿勢等の時間変化を吸収し、それらの影響を排除して物体を正確に認識する。
(もっと読む)
レーダ装置、および、アンテナ角度調整方法

【課題】アンテナの角度調整中に生じた要因に伴う誤った角度調整を防止し、目的とする角度への正確な角度調整を行うことができる技術を提供する。
【解決手段】アンテナの傾き角度に基づいて、アンテナの角度を目的角度に調整するレーダ装置において、アンテナの角度調整手段により調整されるアンテナの目的角度への調整の判定基準となる調整予測値を算出して、この調整予測値とアンテナの角度変化に伴う計測値との誤差に基づいて調整不良を検出する。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】画像処理装置において、物標の接近を検出する簡素な構成を実現するとともに、接近物標が存在することをオペレータが直感的に把握できるように画像処理を行う構成を実現する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、相対航跡用画像メモリ32と、相対航跡判定処理部33と、を備える。相対航跡用画像メモリ32は、当該レーダ装置5に対する物標の相対的な位置変化を示す相対航跡データ群として記憶可能に構成される。相対航跡判定処理部33は、相対航跡用画像メモリ32に記憶される相対航跡データ群のうち、同じスイープライン上に存在する画素の相対航跡データに基づいて、自船(レーダ装置5)に接近する接近物標を検出する。
(もっと読む)
信号処理装置、レーダ装置、車両制御システム、信号処理方法、および、プログラム
【課題】物体情報を正確に検出できるレーダ装置を提供する。
【解決手段】過去の物体検出処理において検出された物体情報の周波数を整数倍した周波数に基づいて、所定周波数範囲を設定して、アップ区間とダウン区間のそれぞれでピーク信号が所定周波数範囲内にある場合に、ピーク信号を特定ピーク信号として設定する。そして、アップ区間とダウン区間との特定ピーク信号同士をペアリングする。これにより、物体情報を正確に検出できる。
(もっと読む)
新規なセンサフュージョン手法を用いた、移動体の状態推定のための装置、方法、およびプログラム
【課題】さまざまな異なる環境に適用できる状態推定系を実現する。
【解決手段】系の状態を推定するための装置であって、(a) ひとつ以上の第一のセンサと、(b) ひとつ以上の第二のセンサと、(c) ひとつ以上の第一のセンサのいずれかから各々が出力を受けて記憶手段に格納する複数の下位モジュールとを含み、下位モジュールが有する記憶手段は下位モジュールの各々に対応する地図と、系の状態を推定するための情報でありひとつ以上の第二のセンサのいずれかの出力から生成され第一のセンサのいずれかの出力と地図とに基づいて更新をされる第一のデータセットとを有し、さらに(d) 複数の下位モジュールの各々から出力された第一のデータセットを受けとり下位モジュールの各々に第一のデータセットの改善を行わせ第一のデータセットを統合し系の状態を推定して下位モジュールの各々へフィードバックする上位モジュールを含む。
(もっと読む)
モードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】マルチパスの影響を受けて、リアル応答が欠落してから再度応答を検出した際に、ゴースト応答の影響を受けずにリアル応答の検出を行い得るモードSを有する二次監視レーダ装置を提供する。
【解決手段】制御装置16において、まずオールコールによりレーダ地上局がカバーする監視領域を走査して得られた目標位置情報をアドレスとともにメモリ17に記憶しておき、入力装置18により入力されゴースト応答が発生しやすいアジマス領域において、SLOスキャンを実行し、SLOスキャンで応答信号を返送した目標のアドレスと、メモリ17に記憶されロールコールに移行済みの目標のアドレスとが一致するか否かを判定し、一致する場合に、SLO質問に対し返送された応答信号をゴースト応答として検出し、ゴースト応答が検出された目標位置に対し、オールコール質問による応答へのロックアウトを無効とする指示を送出するようにしている。
(もっと読む)
車載レーダシステム
【課題】複数のレーダ装置の各物標検知軸を軸調整する際、各レーダ装置の軸調整を容易かつ速やかに行うことができ、各軸調整によって物標の検知精度を高めることができる車載レーダシステムの提供。
【解決手段】第1および第2レーダ装置と、路側物の捕捉点の軌跡ベクトルを算出する軌跡ベクトル算出手段と、自車が直進中であることを検知する走行状態検知手段と、自車が直進中であることが検知された場合、第1レーダ装置における所定の検知方向と路側物の捕捉点の軌跡ベクトルとがなす対路側角度を検知する第1の角度検知手段と、自車が直進中であることが検知された場合、第2レーダ装置における所定の検知方向と路側物の捕捉点の軌跡ベクトルとがなす対路側角度を検知する第2の角度検知手段と、第1の角度検知手段で検知された対路側角度と第2の角度検知手段で検知された対路側角度の差分値を算出する差分角度算出手段とを備える。
(もっと読む)
レーダ装置
【課題】物体の左右方向及び上下方向の少なくとも一方の位置を正確に検出することの可能なレーダ装置の提供。
【解決手段】レーダ装置100は、左右方向に配列され、少なくとも一部が上下方向にずれて配設された複数(ここでは、3個)の素子アンテナ(21、22、23)を有する受信アンテナ2と、位置検出ECU(5)と、を備える。また、位置検出ECU(5)は、前記複数の素子アンテナ(21、22、23)で受信された受信信号の位相差に基づいて、物体TGの上下方向位置P1を検出する第1位置検出部53と、上下方向位置P1の履歴に基づいて、該上下方向位置P1を補正して、補正後の上下方向位置である第1補正位置P1Aを求める第1位置補正部(54)と、を備える。
【選択図】図2 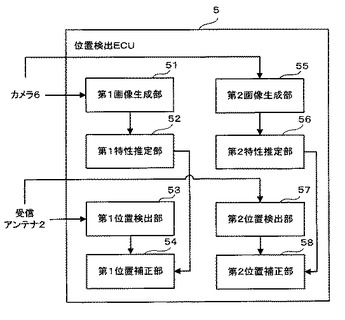 (もっと読む)
(もっと読む)
侵入検知装置
【課題】侵入物体が漏洩同軸ケーブルに接触したこと、接触した侵入物体のサイズを識別できる侵入検知装置を得る。
【解決手段】監視領域内に略平行に設置され、送信漏洩同軸ケーブル2と、受信漏洩同軸ケーブル3を備え、表面波モードで動作する周波数帯域内の発振信号をケーブル2に出力する送信手段100と、発振信号を基準としてケーブル3からの受信信号を検波してその振幅及び位相を求め、発振信号の周波数とともに解析信号として記憶する受信手段200と、解析信号を時間領域の信号に変換して判定信号を求め、判定信号である受信信号強度が第2の閾値を超え、かつ受信信号強度の時間変化量が第3の閾値を超えた場合に侵入物体がケーブルに接触したことを検知する接触検知手段300と、受信信号強度及びその時間変化量である識別信号と、物体識別用データベース402とを比較照合することで侵入物体のサイズを識別する識別手段400とを備える。
(もっと読む)
物標情報推定装置
【課題】レーダ波を用いて検出される物標に関する情報(少なくとも路面からの高さ)を少ない処理負荷で検出する。
【解決手段】判定の対象となる選択物標との距離が100mより大きく(S410:YES)、且つ、中位物標のヌル距離ではない(S420:YES)場合、選択物標の受信電力がヌルポイント(外挿フラグGF=1又は前サイクルの受信電力との電力差ΔPが10dB以上)になっていれば(S430:YES or S460:YES)、その選択物標を高位物標と判定する(S440)。選択物標との距離が100m以下(S410:NO) の場合は、選択物標の受信電力がヌルポイントになっていれば(S470:YES or S500:YES)、その選択物標を中位物標と判定し(S480)、ヌルポイントになっていなければ、その選択物標を低位物標と判定する(S510)。
(もっと読む)
電子的位置決め支援装置を備えた車両の誘導充電システム
【課題】
独立請求項は、計器、運動学的支援装置または機械学的支援装置なしに、ステーション側で固定された構造を有する一次コイルに対して、車両中の二次コイルを自己ガイドして電子的位置決めを確実に行うシステムに関連し、このシステムは、エネルギー消費、機能安全性および磨耗という意味合いでの移動部材、摩擦部材および弾性部材の欠点なしに、90%を超える効率でエネルギー伝送を行なうことを保証している。
【解決手段】
この本発明の目的を達成するために、ステーション側のコイル筐体は、使用材料の選択、表面および内側支持部により、電子的な筐体、反射部材および冷却部材の役割を果たし、したがって、操作準備が完了したパッケージの形態で、単体のステーション側への設置として、電気接続を備えたいずれの平坦な底面にも据え付けることができる。車両は、乗客および荷物の両方を搬送するために使用可能であり、車両の運転手により操舵可能であり、または、運転手なしに、例えば、ある領域を清掃するために、自然環境保全のために、もしくは、内部物流のために操作されうる。
(もっと読む)
車両用物体検知装置
【課題】 自車が衝突する可能性のない走行路上方の走行案内板を精度良く判定する。
【解決手段】 レーダー装置Rが送信した電磁波が物体により反射された反射波に基づいて物体検知手段が自車Vから物体までの距離および自車Vの進行方向に対する物体の左右方向の検知幅Wを取得し、制御対象判定手段がレーダー装置Rの出力に基づいて制御対象となる物体を判定する。このとき、制御対象判定手段は、取得された検知幅Wが予め設定された判定閾値以上であり、かつ自車Vから物体までの距離の減少に応じて検知幅Wが減少する場合に該物体を走行案内板Tであると判定して制御対象から除外するので、つまり走行案内板Tは検知幅Wが実際の左右幅Wtよりも大きく検知され、かつ自車Vの接近に応じて検知幅Wが減少することを利用し、走行案内板Tを精度良く判定して制御対象から除外することができる。
(もっと読む)
パルス検出装置
【課題】簡単な装置構成で容易に自装置に送信されたパルスを検出する。
【解決手段】アンテナが受信した信号を入力すると、入力した受信信号の周波数成分を保持して信号レベルを対数変換するlog圧縮処理部105と、レベルが対数変換された受信信号をアナログ形式からディジタル形式に変換するAD変換器106と、ディジタル形式に変換された受信信号を所定の第1周波数の帯域で制限して得られた信号から信号レベルを検波する第1検波器110と、ディジタル形式に変換された受信信号を第1周波数よりも低い所定の第2周波数の帯域で制限して得られた信号から信号レベルを検波する第2検波器111と、第1検波器で検波された信号レベルと第2検波器で検波された信号レベルとの比較結果を利用し、所定周波数のパルスを自装置に送信された信号として検出するパルス検出部113とを備える。
(もっと読む)
障害物検出装置
【課題】道路構造物を障害物として誤検出することを防止可能な障害物検出装置を提供する。
【解決手段】障害物検出装置1は、ECU2、実測データ生成部3および車両状態計測部4を備える。ECU2は、データベース5、予測データ生成部6および障害物検出部7を有する。実測データ生成部3は、車両周辺の所定領域に存在する物体からのレーダ反射に基づいて物体を検出し、検出結果を示す実測データを生成する。データベース5は、所定領域に存在する道路構造物に関する道路構造物データをあらかじめ保持する。車両状態計測部4は、車両の現在位置および現在姿勢を含む車両状態を計測する。予測データ生成部6は、車両状態および道路構造物データに基づいて、道路構造物からのレーダ反射を予測して予測結果を示す予測データを生成する。障害物検出部7は、実測データおよび予測データに基づいて障害物を検出する。
(もっと読む)
二次監視レーダ
【課題】モードS機から送信される拡張スキッタを有効利用して航空機を監視する。
【解決手段】監視空域を飛行する航空機に質問信号を送信する送信手段122と、監視空域を飛行する航空機から送信された信号を受信する受信手段123と、受信手段が受信した信号から前記送信手段が送信した質問信号に応答する応答信号が検出されると、当該応答信号を解析する応答解析手段132b,133bと、受信手段が受信した信号から拡張スキッタが検出されると、当該拡張スキッタを解析するスキッタ解析手段132dとを備える。
(もっと読む)
RFIDタグ位置検出システム
【課題】アンテナ調整設計が簡略化でき且つRFICの使用数の削減が可能な極めて実用性に秀れたRFIDタグ位置検出システムの提供。
【解決手段】送受信アンテナ部1をX座標軸及びY座標軸に沿ってマトリックス状に設け、一のX座標上でY方向に並設される全ての前記送受信アンテナ部1を介して所定領域内のRFIDタグ2から応答信号を送信させる質問信号の送信若しくは前記応答信号の受信を行うRFICを含むX方向信号処理部3を前記送受信アンテナ部1の各Y方向列に対応して夫々設け、一のY座標上でX方向に並設される全ての前記送受信アンテナ部1を介して前記応答信号の受信若しくは前記質問信号の送信を行うRFICを含むY方向信号処理部4を前記送受信アンテナ部1の各X方向列に対応して夫々設ける。
(もっと読む)
二次監視レーダ
【課題】航空機から受信する拡張スキッタを利用してロールコール期間における航空機の捕捉を行なう。
【解決手段】監視空域を飛行する航空機に質問信号を送信する送信手段122と、監視空域を飛行する航空機から送信された信号を受信する受信手段123とを備え、応答信号を受信すると、当該応答信号を利用して航空機の飛行を監視する二次監視レーダであって、受信手段が、航空機から送信された航空機の識別子及び位置情報を含む拡張スキッタを受信すると、当該拡張スキッタに含まれる位置情報を利用して、航空機が所定範囲に存在する否かを判定する位置判定手段135dと、位置判定手段によって、航空機が所定範囲に存在すると判定されると、当該航空機をロールコール期間の捕捉対象と決定し、当該航空機から受信した拡張スキッタに含まれる航空機の識別子及び位置情報を利用して、送信手段に質問信号を送信させる送信制御手段131とを備える。
(もっと読む)
センサ装置
【課題】十分な省電力化を図ることができると共に、簡易な構成で生産コストを低減することができるセンサ装置を提供すること。
【解決手段】信号を出力する共振回路3と、共振回路3を間欠的に共振させる励振信号を発生する励振信号発生回路2と、共振回路3から出力された信号を対象物Oに送信すると共に、対象物Oに反射された信号を受信する送信アンテナA1および受信アンテナA2と、共振回路3から出力された信号と対象物Oに反射された信号とを混合する混合回路4とを備え、混合回路4から出力された信号に基づいて対象物Oの動きの有無を検出する構成とした。
(もっと読む)
物体検出装置
【課題】本発明は、時系列でのレーダの反射データが不安定な場合でも物体を高精度に検出することができる物体検出装置を提供することを課題とする。
【解決手段】レーダ検出手段10で検出された反射データをセグメントにグルーピングし、セグメント毎の反射データに基づいて物体を検出する物体検出装置1であって、所定の条件に基づいて反射データをセグメントにグルーピングするグルーピング手段22と、各反射データについて過去に属したセグメントの識別情報を特定するセグメント履歴特定手段23と、今回グルーピングされたセグメントに属する反射データの過去のセグメントの識別情報に基づいて、今回グルーピングされたセグメントと過去にグルーピングされたセグメントとの同一性を判別するセグメント識別手段23とを備えることを特徴とする。
(もっと読む)
信号を決定する装置および手法
【課題】テプリッツ行列、またはブロックテプリッツ行列を係数行列とする連立方程式の求解効率を大幅に上げる。
【解決手段】初期連立方程式を、巡回または近似的に巡回である行列の積に分離し、次数を縮小した多数の連立方程式に分離した後で、次数が少なくなった連立方程式の解をもとに初期連立方程式の解を計算する。
(もっと読む)
101 - 120 / 392
[ Back to top ]