
Fターム[5J070AK13]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833)
Fターム[5J070AK13]の下位に属するFターム
Fターム[5J070AK13]に分類される特許
161 - 180 / 392
車載用レーダ装置、及び車載用レーダ制御方法
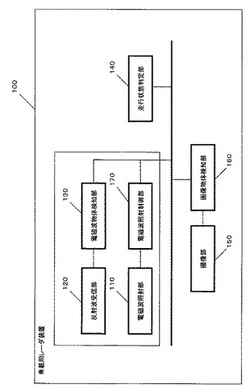
【課題】人体に電磁波を照射する可能性が高い場所を車両が走行している場合に、人体への電磁波照射を低減すると共に、車両が当該車両周辺の物体と衝突することを回避することができる車載用レーダ装置を提供する。
【解決手段】車載用レーダ装置であって、自車周辺に電磁波を照射する電磁波照射部と、電磁波を照射することによって自車周辺の物体から反射される反射波を受信する反射波受信部と、反射波に基づいて、自車周辺の物体を検知する電磁波物体検知部と、自車周辺の物体を補助的に検知する物体補助検知部と、所定の場所を自車が走行している状態か否かを判定する走行状態判定部と、所定の場所を自車が走行している状態であると判定したときに、電磁波物体検知部の検知方向と同じ方向の物体補助検知部の検知状態に応じて、電磁波照射部による電磁波の照射を停止、又は照射強度を弱める電磁波照射制御部とを備える。
(もっと読む)
電波センサ

【課題】被検知体の位置や移動状態を精度良く識別するコンパクトな電波センサを提供する。
【解決手段】複数の受信アンテナ(受信電極22a、22bとが一対、受信電極22c、22dとが一対)を、電波ビームを放射する送信アンテナ(送信電極12)の中心を基準として略対称、且つ送信アンテナの中心と複数の受信アンテナとの中心が略同一直線上となる位置に配置し、送信アンテナから放射され、被検知体に衝突し反射して戻ってきた電波ビームを受信し、複数の受信アンテナに流れる電流をダイオード24a、24bで検波し、その検波結果に基づいて制御部53に備えた動作判断回路にて被検知体の動きを判断する。
(もっと読む)
測距装置、形状測定装置及びそれらの方法
【課題】スペクトラム拡散レーダを用いた測距装置であって、低コストで精度の高い測距をすることができる測距装置を提供する。
【解決手段】一定のチップレートの符号によって拡散された送信波75を放射する送信部71と、反射波76を受信する受信部72と、送信波75と反射波76との相関と遅延時間との関係を示す相関波形を算出する相関部73と、相関波形におけるピーク位置から、対象物までの距離を算出する距離算出部74とを備え、相関部73は、チップレートに対応する時間長であるレンジゲートごとに遅延時間を変化させたときの相関波形を算出し、距離算出部74は、相関波形において最大の相関を示す点とその点に隣接する前後2点のうち相関の大きい点とを用いて、相関波形におけるピークに対応する遅延時間をレンジゲートよりも小さい分解能で算出することで、対象物までの距離を算出する。
(もっと読む)
自律移動装置及び平面状障害物認識方法
【課題】平面状障害物の位置を単純な手順により認識可能とし、正確に自己位置を特定して、効率的で安全な自律走行を可能とする。
【解決手段】レーザビームを用いて水平面内をスキャンし、複数のスキャンポイントの座標を取得し、得られた順番が時系列的に前後する2つのスキャンポイントについて、前のスキャンポイントを始点とし後のスキャンポイントを終点とする要素ベクトルを形成し、複数の要素ベクトルの中から、得られた順番が時系列的に前後し、かつ互いに連続する複数の要素ベクトルであって、その長さがそれぞれ第1所定長以下であり、1つの要素ベクトルに対してそれに連続する他の要素ベクトルがなす振れ角度が第1所定角度以下であり、振れ角度の積算値が第2所定角度以下であるものをベクトル合成し、始点と終点により定義される線分が第2所定長以上であるときに、そのスキャンセグメントベクトルに沿って平面状障害物が存在していると認識する。
(もっと読む)
物体認識装置及びレーダ装置
【課題】レーダ装置外部から電磁波が作用することに起因するノイズがレーダ信号等に混入した場合に、物体の誤認識を防止する。
【解決手段】所定角度範囲に対し送信されたレーダ信号と物体により反射された前記レーダ信号との周波数差信号に基づき前記物体を認識する物体認識装置は、単位角ごとに前記周波数差信号のレベルのピークを検出するピーク検出処理と、複数の前記ピークから相互に所定の周波数範囲内にあるピーク群を検出し、前記ピーク群のうちピークのレベルが極大値を形成するピーク群を前記物体として認識する物体認識処理とを行い、前記物体認識処理では、前記ピーク群に含まれるピークの数が基準ピーク数以下であり、且つ当該ピークのレベルが基準レベル以上であるという条件が満たされ、当該ピークがノイズによる蓋然性が大きいときには、当該ピーク群を前記物体として認識しないので、誤認識を防止できる。
(もっと読む)
物体検出装置
【課題】簡単な構成によって路面かあるいは路面上の物体かを判別する物体検出装置を提供することを課題とする。
【解決手段】路面上に存在する物体を検出する物体検出装置1であって、物体の位置を検出する位置検出手段10,21と、位置検出手段10,21で検出する際の少なくとも鉛直方向の検出角度を設定する検出角度設定手段24と、検出角度設定手段24によって設定された検出角度に変化させた前後で位置検出手段10,21によって所定時間間隔でそれぞれ検出された各位置の変化に基づいて路面か又は路面上の物体かを判定する判定手段25とを備えることを特徴とする。
(もっと読む)
移動体位置検出装置、移動体位置検出システム及びプログラム
【課題】データ量の増加を軽減し、検出漏れを防ぐことができる移動体位置検出装置、移動体位置検出システム及びプログラムを提供する。
【解決手段】移動体位置検出装置10は、移動体2に設けられた無線タグ3から固定して配置された複数のセンサ(受信デバイス)4により受信されたタグ識別情報を、受信デバイス識別情報とともに受信履歴情報として順次記憶するセンサ履歴保持手段11と、所定の回数連続していずれかのセンサ4で受信されたタグ識別情報が受信履歴情報に存在するか否かを判定し、存在すると判定したとき、当該タグ識別情報に対応する移動体2の位置を、タグ識別情報を連続して所定の回数受信したセンサ4の位置に基づいて決定する検出判定手段13とを備える。
(もっと読む)
レーダシステム
【課題】レーダシステム起動時でも早期に物体検出を行う。
【解決手段】。パルスレーダ1は、外部へ送信パルスを送信し、ターゲットで反射された送信パルスを受信波形として受信する。記憶部2は、レーダシステム10の近傍に物体が存在しないとみなせる状態において、パルスレーダ1が受信した基準波形を記憶する。入力部3は、レーダシステム10の起動時において、パルスレーダ1が受信した入力波形を取得する。比較部4は、記憶部2に記憶された基準波形と、入力部3で取得された入力波形との比較結果に応じて、レーダシステム10の起動時における物体の有無を検出する。
(もっと読む)
探知測距装置および探知測距方法
【課題】探知測距装置において、角度推定の前段に行われる目標数推定の計算負荷を軽減し、且つ、推定精度を向上させる。
【解決手段】擬似空間平均共分散行列生成部104b−6は、Rf1、Rf2、Rb1、Rb2から、適切な行列を一つ選択するか、適切な行列を2つ以上選択して組み合わせて、擬似空間平均共分散行列Rを生成する。擬似空間平均共分散行列エルミート共役積生成部104c−1は、目標数推定用行列RRHを生成する。目標数推定用行列分解部104c−2は、RRHにLU分解を施して下三角行列Lと、上三角行列Uとに分解する。指標生成部104d−1は、この上三角行列Uの要素を用いた指標を生成する。指標パラメータ走査処理部104d−2は、指標生成部104d−1によって生成された指標を用いて目標数mを推定する。
(もっと読む)
目標識別装置
【課題】多偏波観測により信号の次元を稼ぐことで目標識別性能の向上を図ることができる目標識別装置を得る。
【解決手段】複数の偏波チャネルで送受信を行い、多偏波レーダ画像を生成する多偏波レーダ画像取得手段1と、多偏波レーダ画像の各画素について全電力を算出して全電力画像を出力する全電力算出手段2と、全電力画像に対して閾値処理を適用して処理対象領域を抽出する第一閾値手段3と、抽出された領域に含まれる画素に対して近傍の領域から共分散行列の推定値を算出する共分散行列推定手段4と、共分散行列の固有値分解を行い、ポラリメトリックエントロピーとαパラメータを算出するエントロピー・αパラメータ算出手段5と、ポラリメトリックエントロピーとαパラメータ及び算出された全電力の値に対して識別判定を行う第二閾値手段6とを備えた。
(もっと読む)
追尾装置及びプログラム及び追尾方法
【課題】複数の異なるセンサ装置が目標を観測した結果に基づいて、目標を追尾する。
【解決手段】トラック記憶部181は、複数のセンサ装置それぞれが観測した目標に関する情報を表わす複数のトラックデータを記憶する。トラック記憶部181が記憶したトラックデータが更新された場合、優先度算出部141は、更新されたトラックデータの優先度を算出する。共通データ更新部144は、優先度算出部141が算出した優先度が高い場合に、更新されたトラックデータを、共通データ記憶部182に共通データとして記憶させる。
(もっと読む)
マルチスタティックレーダ装置
【課題】送信側のレーダ装置と受信側のレーダ装置と距離が未知の場合であっても直接波の影響を排除できるマルチスタティックレーダ装置を提供する。
【解決手段】送信側のレーダ装置から送信された電波を受信側のレーダ装置で受信して目標を検出するマルチスタティックレーダ装置において、受信側のレーダ装置は、送信側のレーダ装置から送信された電波を受信する主アンテナ1と、送信側のレーダ装置から送信された電波を受信する補助アンテナ11aと、主アンテナからの信号に基づき生成された主チャンネル信号の振幅と補助アンテナまたは主チャンネルからの信号に基づき生成された補助チャンネル信号の振幅とを比較する振幅比較器6と、振幅比較器により主チャンネル信号の振幅が補助チャンネル信号の振幅より大きい場合に、該主チャンネル信号に基づき目標の検出および測角を行う検出/測角器5を備えている。
(もっと読む)
レーダ装置
【課題】従来の多周波ステップICW方式による車載用レーダは,目標の移動速度にかかわらず複数目標の検出が可能であるが,送信波の漏れ込みを同時に受信すると目標対雑音電力比が小さい遠方の目標を検出することが困難になる。
【解決手段】パルス状送信波を目標に照射し、目標からの反射波を受信機で受信した受信信号中の相対速度0の信号成分を抑圧するフィルタの処理を、受信信号のレンジ番号により目標までの距離が所定値以上の時実施し、所定値未満の時は非実施に切り替えるスイッチを備え、スイッチによる受信機での受信信号またはフィルタ処理後の受信信号を周波数分析手段で周波数分析し、周波数分析結果から目標信号を目標検出手段で抽出し、目標信号から目標までの距離を計測する目標距離算出手段を備える。
(もっと読む)
装置間距離判定システム、無線端末装置、プログラム及び記憶媒体
【課題】簡単な構成で、少なくとも2種類の境界において無線端末装置間距離の境界判定を行う。
【解決手段】無線端末装置10の送信部12がN(N≧2)種類の送信電力の無線信号を送信する。無線端末装置20は受信部22で無線信号を受信し、その距離判定部24が、何種類の送信電力の無線信号が無線端末装置の受信部22に受信されたかを判定することにより、無線端末装置10と無線端末装置20との間の距離を判定し、その判定結果に基づき、本体部25の或る機能をロックしたり、本体部25に警告情報を出力させたりする。
(もっと読む)
物体種別判定装置、物体種別判定方法、及び物体種別判定用プログラム
【課題】レーダによる検出結果に基づいて、車両等の物体の種別を適切に判定することができる物体種別判定装置、方法、及び物体種別判定用プログラムを提供する。
【解決手段】物体種別判定装置は、レーダ20により複数の方位角に電磁波を照射し、それぞれの方位角における物体の検出点を取得する検出点取得手段11と、取得された複数の検出点のうち、同一の物体についての検出点であると想定される検出点をグループ化して、点列データとして抽出する点列データ抽出手段12と、抽出された点列データが、方位角が増加又は減少するに従って、検出点のレーダ20からの距離が直線的に減少する第1の状態から直線的に増加する第2の状態に切り替わる変位特性を有するか否かを認識する変位特性認識手段13と、変位特性認識手段による認識結果に応じて、点列データが抽出された物体の種別を判断する種別判断手段14とを備える。
(もっと読む)
周辺監視装置および周辺監視方法
【課題】自車が他車の死角領域内で走行中であることを運転者に意識させて運転者に注意を促すことができる「周辺監視装置および周辺監視方法」を提供する。
【解決手段】自車の周辺に存在する他車に対する自車の相対的な位置を検出する位置検出部11と、他車の運転者にとっての死角を含む警告発生対象領域を検出する対象領域検出部12と、警告発生対象領域内に自車が存在するか否かを判定する存在判定部13と、警告発生対象領域内に自車が存在すると判定された場合に警告を発する警告発生部14とを備え、自車視点による自車の死角ではなく、他車視点による他車の死角を含む警告発生対象領域を自車にて検出し、当該対象領域を用いて警告発生の必要性を判定することにより、走行中の自車が他車の死角に入ったときに警告が発せられるようにする。
(もっと読む)
物体検知装置
【課題】所定範囲内で検知した複数の物体を統合して単一の物体として認識する際に所定範囲を適切に設定する。
【解決手段】物体検知装置10は、自車両の進行方向の検出対象領域に電磁波を発信し、物体からの反射波を受信する外界センサ11と、外界センサ11の検知結果に基づき、自車両に対する物体の位置および絶対速度を算出する物体位置検出部31および絶対速度算出部32と、所定統合範囲内に対して複数の異なる反射波が受信された場合に、少なくとも物体の位置に基づき、所定統合範囲内の複数の物体を統合して単一の物体として認識する物体統合部33とを備え、物体統合部33は、複数の物体のうち任意の物体の位置を基準として略矩形状の所定統合範囲を設定し、任意の物体の絶対速度に基づき、所定統合範囲の前後方向幅および左右方向幅を互いに独立に設定する。
(もっと読む)
物体検知装置
【課題】自車両の外界に検知された物体が虚像か実像かを容易かつ適切に判定する。
【解決手段】物体検知装置10は、自車両の進行方向に存在する物体を検知する外界センサ11および物体位置検出部31と、検知された物体の自車両に対する相対距離に係る相対関係を算出する相対関係算出部32と、検知された物体が虚像か実像かを判定する虚実判定部34とを備え、自車両に相対する向きに移動する第1物体および第2物体が検知された場合に、第1物体と第2物体との間の車両左右方向距離が所定左右方向距離以上であり、かつ、第1物体と第2物体との間の車両前後方向距離が所定前後方向距離以下である場合に、第1物体および第2物体を判定対象として選択する判定対象選択部33を備え、虚実判定部34は、判定対象選択部33により選択された判定対象が虚像か実像かを判定する。
(もっと読む)
位置追跡システムを使用し相互作用時間に基づいて対象の関連付けを実施するためのシステム及び方法
【課題】位置追跡システムを使用し相互作用時間に基づいて対象の関連付けを実施するためのシステム及び方法
【解決手段】相互作用時間に基づいて対象を場所又は第2の対象に関連付けるためのシステムが提供される。システムは、対象を識別するデータを提供するために対象にリンクされた対象識別要素と、対象の位置を決定するための位置決定モジュールとを含む。対象識別要素は、データに少なくとも部分的に基づいて対象の位置を決定するための対象位置特定モジュールと、対象を第2の対象又は場所に関連付けるための対象関連付けモジュールとを含む。対象関連付けモジュールは、対象が閾時間以上の期間にわたって第2の対象又は場所の近くにあるかどうかを決定し、対象と第2の対象又は場所との間に関連付けを形成するように構成される。
(もっと読む)
FMCWレーダ装置
【課題】レーダの送信信号に三角波状の周波数変調を行い、送受信信号から抽出されたUP周波数とDOWN周波数のペアリング処理を行うことにより、目標ターゲットの距離、速度等を計算するための技術に関し、複数の移動対象物体が存在した場合における、複数のUP周波数とDOWN周波数のミスペアリングをなくすことにある。
【解決手段】速度全組合せ算出部111は、検出された複数のUP周波数と複数のDOWN周波数の全組合せに対応する速度値を算出する。速度出現頻度算出部112は、上記全組合せに対応する速度値について、その出現頻度を集計算出する。UP/DOWN周波数ペアリング部113は、上記出現頻度に基づいて、UP周波数とDOWN周波数の適切なペアを決定する。この場合、各組合せに対応する速度値又は距離値が所定の閾値を超えるものについては、ペアから除外される。
(もっと読む)
161 - 180 / 392
[ Back to top ]