
Fターム[5J070AK15]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833) | 複数物標の識別 (246)
Fターム[5J070AK15]に分類される特許
1 - 20 / 246
レーダ装置
【課題】測距性能および距離分解能の向上を図ると共に、複数目標を目標の対処を可能にするレーダ装置を得る。
【解決手段】目標があらかじめ設定された範囲内の相対速度および相対距離を有し、相対速度を有する目標のPRI内距離のアンビギュィティを解く第1の条件と、相対距離を有する目標のPRI内の距離分解能が、FMレンジング後の距離分解能よりも高精度となる第2の条件とを備えたパラメータを設定し、設定したパラメータに基づき複数のPRIに渡って周波数変調されたキャリア信号に対してPRIでパルス内変調された送信信号を放射する送信機2を備えた。
(もっと読む)
航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法

【課題】センサ間の相関処理結果が矛盾しても、相関処理結果を各センサで即時に一意的に決定して、全センサで同一のシステム航跡情報を得る。
【解決手段】相関処理部122(航跡間相関部)は、追尾処理部113が生成した自センサローカル航跡情報と、受信部121が受信した他センサローカル航跡情報433とを照合して、自センサシステム航跡情報422(航跡間対応関係)を生成する。システム航跡情報照合部123は、受信部121が受信した他センサシステム航跡情報434と、自センサシステム航跡情報422とを照合する。システム航跡情報修正部124は、システム航跡情報照合部123によるシステム航跡情報照合結果423を用いて、結果が一致するように自センサシステム航跡情報を修正する。
(もっと読む)
受信装置
【課題】受信信号の解析の信頼性を向上する。
【解決手段】受信装置は、演算手段と、選択手段と、二値化処理手段とを備える。演算手段は、受信信号のピーク値を用いて当該受信信号の第1閾値を求める。選択手段は、演算手段で決定された第1閾値を出力するとともに、受信信号から所定のパルスパターンを検出後所定の期間、第1閾値に代えてパルスパターンのピーク値を用いて求められた第2閾値を選択して出力する。二値化処理手段は、選択手段から出力される閾値を利用して、受信信号を二値化する。
(もっと読む)
FMCWレーダ装置
【課題】広い距離範囲に渡って複数のターゲットを検出し、検出した各ターゲットまでの距離および相対速度の測定が可能であるFMCWレーダ装置を提供する。
【解決手段】複数の距離範囲観測期間を設定する手段(101)と、距離範囲観測期間ごとで異なる複数の変調周波数幅を設定する手段(101)と、送信信号と受信信号から距離範囲観測期間ごとにビート信号を生成する手段(107)と、生成されたビート信号の通過帯域幅を設定する手段(109、111)と、通過帯域幅設定手段を通過するビート信号を増幅する手段(110、112)と、増幅されたビート信号をデジタルデータに変換する手段(113)と、距離範囲観測期間ごとに通過帯域幅設定手段および増幅手段を切り替える手段(108a、108b)を備える。
(もっと読む)
無線測距装置、無線端末及び無線測距システム
【課題】折り返しパルスの受信レベルが高速に大きく変動する環境においても、適切な利得によって折り返しパルスを受信し、正確に測距する無線測距システムを提供する。
【解決手段】リーダ制御部25は、タグ−リーダ間の距離を検出するために、送信電力、受信ゲインおよび自折り返しパルスの送信レベルの組合せを周期的に切り替える。第1の組合せでは、リーダ制御部25は、送信電力、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「小」、「小」、「大」に設定する。この場合、タグAとタグBでは、リーダ5からの送信パルスの受信レベルが第1の閾値より小さいので、折り返し送信しない。タグCでは、送信パルスの受信レベルが第1の閾値より大きいので、折り返し送信する。第2の組合せでは、リーダ制御部25は、送信電力、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「中」、「中」、「中」に設定する。
(もっと読む)
被災者救助支援システム、情報処理方法
【課題】地域や場所の制限無く利用が可能であって、迅速かつ効率的に被災者の位置を特定することのできる被災者救助支援システムを提供する。
【解決手段】被災地には複数のポータブル基地局が設置される。ポータブル基地局は、被災者が所持するRFIDタグとUWB−IRによる通信を行ってタグIDと位置推定のためのパラメータから成る位置パラメータ情報を生成し、これを測位サーバに送信する。測位サーバは、ポータブル基地局から送信された位置パラメータ情報により、RFIDタグ100ごとの位置を推定して記憶する。
(もっと読む)
車両用物体検知装置
【課題】自車両の外部に存在する物体の静止および移動の状態を精度良く検知する。
【解決手段】車両用物体検知装置10は、レーダ装置12から発信された電磁波の物体上における反射点の位置を算出する反射点算出部21と、自車両から物体までの距離を算出する距離算出部22と、反射点の位置に基づき物体の水平方向の両方の端点を検出する端点検出部23と、検知対象物の何れか一方の端点が自車両から見て比較対象物に重なっているか否かを判定する重なり判定部24と、重なり判定部24により重なっていると判定され、かつ、時間経過と共に検知対象物までの距離が比較対象物までの距離よりも近くなった場合に、検知対象物の前記比較対象物に重なっていない他方の端点の横移動量に基づいて検知対象物の横移動速度を算出する端点移動速度算出部25とにより、検知対象物の横移動速度の検出精度を向上させる。
(もっと読む)
情報表示装置
【課題】所定の地点の近傍の詳細な情報と当該地点の遠方の情報とを同時に表示可能な情報表示装置を提供する。
【解決手段】レーダ指示器(情報表示装置)は、取得部と、制御部と、を備える。取得部は、移動体(他の船舶)、移動時(航海時)の目印となるランドマーク、及びユーザに登録されたポイント(ユーザ登録ポイント)のうち少なくとも1つからなる表示対象の位置情報を取得する。制御部は、自船の位置情報及び自船の周辺情報をレーダ映像表示領域35aに表示するとともに、表示対象の位置がレーダ映像表示領域35aの外側となる少なくとも1つの表示対象を、表示対象が位置する方向に対応させて、レーダ映像表示領域35aの外周部35bに表示する。
(もっと読む)
遠隔ロケーションにおけるRFIDベースの誘導
【課題】区域内でユーザを位置特定するため、および誘導するための誘導位置特定システム等を提供する。
【解決手段】クエリ信号40を送信し、応答信号42を受信するように構成されたRFID(無線周波数識別)読取りデバイス14と、区域内に配置されたRFIDタグ8を含む。RFIDタグは、その区域内のRFIDタグのロケーションに関連付けられた固有の情報を格納する。RFIDタグのそれぞれは、RFID読取りデバイスからクエリ信号を受信し、その固有の情報を伝送する応答信号をRFID読取りデバイスに送信するように構成される。RFID読取りデバイスは、応答信号を利用して、その区域内のそのRFID読取りデバイスの現在のロケーションを特定するように構成される。
(もっと読む)
動態監視システム
【課題】同一範囲内に存在する複数のRFIDタグ情報を検出することにより、その検出結果をセキュリティに活用する動態監視システムを提供する。
【解決手段】RFIDタグに記憶された情報を読み取るRFID読み取り部11と、予め登録済みのRFIDタグ情報を記憶するRFID登録情報記憶部21と、RFID読み取り部11で読み取ったRFIDタグ情報とRFID登録情報記憶部21に予め登録済みのRFIDタグ情報との認証を行うRFID認証部22と、RFID認証部22で認証された移動体の位置情報を記録する位置情報記憶部14と、RFID認証部22の情報を表示する表示部23と、を備えた動態監視システムにおいて、RFID登録情報記憶部21は、前記RFIDタグの登録情報を拡張し、前記RFIDタグ情報に紐づけられた所定の付加情報を記憶する追加登録情報記憶部24を有する。
(もっと読む)
レーダ装置及び該レーダ装置に用いられるレーダ信号処理装置
【課題】複数の受信データを同時に処理可能な信号処理部を有する場合の信号処理の効率が改善されるレーダ装置を提供する。
【解決手段】空中線装置11からビーム受信信号r1 ,r2 ,…,rN が出力され、受信処理端末121 ,122 ,…,12N で処理が行われ、受信データ(IQデータu1 ,u2 ,…,uN )が生成される。IQデータu1 ,u2 ,…,uN のうち、たとえばIQデータu1 ,u2 のみが信号処理負荷調整手段(ネットワークスイッチ13)を経て信号処理端末141 へ送出され、目標検出データv1 ,v2 が生成されて表示処理装置4へ送出される。また、IQデータuN のみがネットワークスイッチ13を経て信号処理端末14M へ送出され、目標検出データvN が生成されて表示処理装置4へ送出される。表示処理装置4では、目標検出データv1 ,v2 ,…,vN に基づいて処理されて表示される。
(もっと読む)
ビーム管理装置及びこれを備えたレーダ装置並びにビーム管理方法及びプログラム
【課題】 特定のAPAAに割り当てられた追尾目標が増加した場合でも、他のAPAAの捜索性能を保ちながら、追尾目標に対する追尾ビームの照射頻度を維持する。
【解決手段】 ビーム管理装置10は、予め定められた捜索ビーム及び追尾ビームの照射タイミングからなる基本照射スケジュールaを記憶する基本照射スケジュール記憶手段11と、APAAに割り当てられた追尾目標bを入力する追尾目標入力手段12と、割り当てられた追尾目標bの数が増加し、予め定められた追尾ビームの数を越えた場合に、捜索ビームの照射に要する時間を短縮し、余った時間を追尾ビームの照射に利用するように照射スケジュールcを算出する照射スケジュール算出手段13と、を備えたことを特徴とする。
(もっと読む)
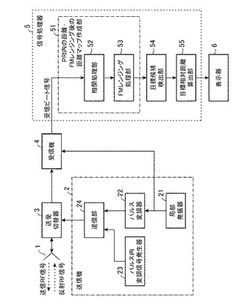
統合類識別処理装置
【課題】 類識別応答が得られない目標に対して、オペレータによる類識別判断を支援するための、目標危険度情報を得る。
【解決手段】 類識別質問の結果、類識別応答を得られなかった目標に対し、レーダから得られる目標の位置、速度、加速度及び広域情報入力装置12から得られる空域、航空路を用いて、目標危険度を導出する目標危険度判定装置11を設け、オペレータに危険度を提供することで、オペレータによる類識別判断を支援することができる。
(もっと読む)
追尾処理装置
【課題】目標に関する状況判断に資する情報が提供される追尾処理装置を提供する。
【解決手段】相関処理部は、監視区域に存在する目標の位置と、追尾中目標の登録予測位置と、登録判定結果に応じて異なる閾値とに基づいて、目標と追尾中目標とが同一かどうか判定する相関処理を実行する。予測処理部は、位置及び登録予測位置に基づいて目標の次回の予測位置を算出する。予測判定部は、位置、目標の種類に対応する斜面移動能力、及び監視区域の地勢情報に基づいて目標が次回に到達し得る目標存在範囲を算出し、予測位置及び目標存在範囲に基づいて目標が予測位置に到達可能かどうかの予測判定を実行し、予測判定の結果で登録判定結果を更新する。目標存在範囲提示部は、目標存在範囲を地図上の領域として提示する。予測変更部は、予測判定の結果が「到達可能」の場合に予測位置で登録予測位置を更新する。
(もっと読む)
多目標追尾装置、多目標追尾方法、および多目標追尾プログラム
【課題】追尾ビームを効率的に追尾目標に照射し追尾精度を有効に向上させる。
【解決手段】電子走査アンテナ部101で取得された信号に基づいて、一のビーム照射により検知可能な異なる追尾目標を追尾目標グループとして決定する追尾目標グループ算出部110と、追尾目標グループに含まれる異なる追尾目標間の相互位置関係に応じて追尾用のビームの照射スケジュールおよび照射領域を示すビームパラメータを算出する、追尾ビームパラメータ算出部106と、算出されたビームパラメータに基づき電子走査アンテナ部101によるビーム照射動作の起動スケジュールを決定し、これに基づき電子走査アンテナ部におけるビーム照射動作を制御するアンテナ制御部109を備えた。
(もっと読む)
物体検出装置および物体の検出方法
【課題】レーダ装置の検知範囲に含まれている物体を、その物体の移動速度に関わらず検知する。
【解決手段】実施形態に係る物体検出装置は、送信部、受信部、移動物体検出部、および、微動物体検出部を備える。送信部は、レーダパルスを送信する。受信部は、物体からのレーダパルスの反射波を受信する。移動物体検出部は、受信部が第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出する。微動物体検出部は、第1の時間よりも長い第2の時間の間に、受信部が受信した受信信号を解析することにより移動物体に比べて移動量が微小な微動物体を検出する。
(もっと読む)
二次監視レーダ
【課題】オールコール期間にモードS応答の多重検出が発生した場合にも他の航空機の検出率の低下を防止する。
【解決手段】二次監視レーダは、捕捉機リスト記憶部と、指定機リスト記憶部と、送信手段と、判定手段と、更新手段とを備える。送信手段は、オールコール期間には一括質問を送信し、ロールコール期間にはロールコール捕捉機リストおよびロールコール指定機リストに登録される航空機に個別質問を送信する。判定手段は、一括質問に対して受信した応答に含まれるモードSアドレスがロールコール捕捉機リストに含まれているか否かを判定する。更新手段は、判定手段の結果により、当該航空機のモードSアドレスを追加して捕捉機リストを更新し、または、当該航空機のモードSアドレスを追加してロールコール指定機リストを更新する。
(もっと読む)
航空機の監視レーダシステム及び航空機の監視方法
【課題】航空機のトランスポンダから送信される捕捉スキッタまたは拡張スキッタの送信周期を利用して、モードSアドレステーブルに保持するモードSアドレスの数を必要最小限にし、かつ最新状態に保つ。
【解決手段】All Call Error Correction2はモードSアドレスを抽出し、モードSアドレステーブル5に蓄積する。Timer Reset Cntrl6は前記蓄積したモードSアドレスを、捕捉スキッタまたは拡張スキッタの送信周期よりも長い削除周期毎に削除する。Roll Call Error Correction8は航空機搭載のトランスポンダから送信される個別識別応答9から、モードSアドレス及びデータを抽出する。Comp CNTRL7は前記個別識別応答に含まれる前記モードSアドレスと、モードSアドレステーブル5内に蓄積した全てのモードSアドレスとを比較照合し、誤り訂正を行う。
(もっと読む)
地中レーダ
【課題】地中の埋設物を探知する地中レーダにおいて、路面上等に埋設物の埋設位置を容易に表示可能にする。
【解決手段】電磁波を送出する電磁波送信部5とこの電磁波の反射波を受信する電磁波受信部6とを備えたレーダ本体2を有し、電磁波受信部5からの受信波データAにより埋設物を探知する地中レーダ1において、レーダ本体2の移動位置を測定する位置測定部3と、レーダ本体2を移動させて埋設物を探知する際の受信波データAと受信波データA取得時に位置測定部3で得られるレーダ本体2の位置データBとに基づいて定まる埋設物の埋設位置データCを記憶する記憶部8と、再度、レーダ本体2を移動させた時に、当該移動の際に位置測定部3で得られるレーダ本体2の位置データBと記憶部8に既に記憶されている埋設位置データCとに基づいて埋設物11の埋設位置を表示する表示部4とを備える。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】分解能メッシュと、地域メッシュの重なる面積に応じて地域メッシュの目標物の数量を求め、目標物の数量の管理を向上させる目標物管理装置および目標物管理方法を提供する
【解決手段】目標物が所在しているか否かを検出し、目標物が所在するときは分解能メッシュ各々における目標物の数量を求める検出部と、目標物が所在する第1のメッシュと重なる、監視対象範囲を予め設定した一定の領域で分割した範囲である第2のメッシュを抽出し、抽出された第2のメッシュと重なる目標物が所在する第1のメッシュの目標物の数量を分配し、抽出された第2のメッシュに関連付ける分配部と、地域メッシュ各々に分配された目標物の数量の総和を、地域メッシュ各々で求める算出部と、を備える目標物管理装置である。
(もっと読む)
1 - 20 / 246
[ Back to top ]