
Fターム[5J070AK16]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | クラッタ消去 (225)
Fターム[5J070AK16]の下位に属するFターム
Fターム[5J070AK16]に分類される特許
1 - 20 / 151
レーダ装置
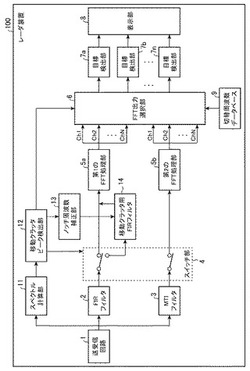
【課題】クラッタ抑圧性能と目標信号保存性能を両立させると同時に、静止クラッタと移動クラッタを抑圧することができるレーダ装置を得る。
【解決手段】受信信号の静止クラッタを抑圧するFIRフィルタ2と、受信信号の静止クラッタを抑圧するMTIフィルタ3と、ノッチ周波数補正部13が調整したフィルタ係数を用いて、FIRフィルタ2の出力信号の移動クラッタを抑圧する移動クラッタ用FIRフィルタ14と、FIRフィルタ2または移動クラッタ用FIRフィルタ14の出力信号に対してコヒーレント積分を行う第1のFFT処理部5aと、MTIフィルタ3の出力信号に対してコヒーレント積分を行う第2のFFT処理部5bと、移動クラッタピーク検出部12の検出結果に基づいて、第1のFFT処理部5aからの出力信号と第2のFFT処理部5bからの出力信号のいずれか一方の出力信号を選択するFFT出力選択部6とを備えた。
(もっと読む)
レーダ装置

【課題】測距性能および距離分解能の向上を図ると共に、複数目標を目標の対処を可能にするレーダ装置を得る。
【解決手段】目標があらかじめ設定された範囲内の相対速度および相対距離を有し、相対速度を有する目標のPRI内距離のアンビギュィティを解く第1の条件と、相対距離を有する目標のPRI内の距離分解能が、FMレンジング後の距離分解能よりも高精度となる第2の条件とを備えたパラメータを設定し、設定したパラメータに基づき複数のPRIに渡って周波数変調されたキャリア信号に対してPRIでパルス内変調された送信信号を放射する送信機2を備えた。
(もっと読む)
レーダ装置
【課題】空間に存在している複数の目標の検出性能を高めることができるとともに、測距性能を高めることができるレーダ装置を得ることを目的とする。
【解決手段】パルスドップラ処理の処理結果であるドップラ周波数と、1つの周波数変調帯域幅を用いるRGH処理の処理結果であるビート周波数fb及びPRI内の距離rpriとを用いて、複数の目標候補の組み合わせを決定し、複数の組み合わせの中から、正しい組み合わせを選択し、その組み合わせに係る各目標候補のビート周波数fb及びPRI内の距離rpriを用いて、各目標候補の相対速度v及び相対距離Rを算出する。
(もっと読む)
フェーズドアレーアンテナ
【課題】 レーダ装置に用いるフェーズドアレーアンテナにおいて、送信電力の一部が素子間相互結合により送受切り替えスイッチにつながれた終端器で消費されるため、アンテナの効率が低下する。
【解決手段】 信号の送受信を行う第1のアンテナと、信号の受信のみを行う第2のアンテナと、前記第1のアンテナに送信信号を分配するとともに前記第1のアンテナと前記第2のアンテナからの受信信号を合成する給電回路とを備えたフェーズドアレーアンテナであって、前記第2のアンテナは、前記第1のアンテナが前記送信信号を送信する時にもれこんだ送信信号を反射するスタブを設けることで、信号送信時の効率低下を防ぐようにした。
(もっと読む)
目標追尾装置
【課題】PRI内距離を目標の運動諸元の推定処理に利用できるようにして、目標の運動諸元の推定精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】PRI内距離ゲート内外判定部14によりゲート内にあると判定されたPRI内距離毎に推定値の仮説を生成して、その仮説の信頼度を算出し、1以上の仮説の中で、信頼度が高い仮説を採択する推定値仮説生成部15や、推定値仮説生成部15により採択された仮説に係るPRI内距離を用いて、現時点での運動諸元の推定値を更新するPRI内距離フィルタ処理部16などを備える。
(もっと読む)
レーダ装置
【課題】 ステップ周波数をパルス信号帯域よりも大きくした場合においても、曖昧なく距離計測可能なレーダ装置を提供することを目的としている。
【解決手段】 ステップ周波数ずつ周波数が異なる受信パルス信号に基づく合成帯域処理により距離計測を行うレーダ装置であって、前記合成帯域処理が行われる前記受信パルス信号のスペクトルの帯域外の成分を強調する帯域外成分強調フィルタ処理を行うフィルタ処理器と、を備えたものである。
(もっと読む)
受信機、レーダ装置及びSTC制御方法
【課題】パルス幅の異なるパルス信号を用いるレーダ装置のSTC回路において、シークラッタの除去が十分に行え、かつ物標で反射されたパルス信号の探知も容易に行えるようにすることである。
【解決手段】第1減衰器3は、距離値と減衰量との関係を示すゲインSTC1(r)に基づいて短パルス受信信号を減衰させる。第2減衰器4は、ゲインSTC1(r)とはゲインSTC2(r)に基づいて長パルス受信信号を減衰させる。信号選択器5及び受信用長/短パルス切替器9は、第1減衰器3の出力と前記第2減衰器4の出力のいずれか一方を選択する。入力部16は、信号選択器5及び受信用長/短パルス切替器9の切替の距離値を入力するためのものである。STC制御器及び長/短パルス切替制御器17は、入力部16で入力された距離値で信号選択器5及び受信用長/短パルス切替器9に切替を行わせる。
(もっと読む)
指示支援装置
【課題】本発明は、目標から到来した反射波で示される画像の分解能の向上を図る高分解能処理の対象を設定する指示支援装置に関し、構成が大幅に複雑化することなく高分解能処理の処理量を削減できることを目的とする。
【解決手段】到来した反射波で示される画像の内、前記画像に含まれる見かけ上の目標が位置する領域もしくは部位を抽出する抽出手段と、前記領域または前記部位を分解能の向上を図る高分解能処理の対象とする制御手段とを備える。
(もっと読む)
レーダー信号の時空間適応処理を用いて不均一な環境においてターゲットを検出する方法、および時空間適応処理を用いて不均一な環境のレーダー信号内のターゲットを検出する方法およびシステム
【課題】レーダー信号の時空間適応処理を用いて不均一な環境においてターゲットを検出する方法の提供。
【解決手段】正規化トレーニングデータを得るために不均一な環境のトレーニングデータを正規化することと、正規化トレーニングデータを表す正規化サンプル共分散行列を求めることと、クラッター部分空間行列を得るために正規化サンプル共分散行列によって表される部分空間を追跡することと、クラッター部分空間行列およびステアリングベクトルに基づいてレーダー信号内のターゲットの存在の尤度を表す検定統計量を求めることと、ターゲットを検出するために検定統計量を閾値と比較すること。
(もっと読む)
レーダ装置及び該レーダ装置に用いられるレーダ信号処理装置
【課題】複数の受信データを同時に処理可能な信号処理部を有する場合の信号処理の効率が改善されるレーダ装置を提供する。
【解決手段】空中線装置11からビーム受信信号r1 ,r2 ,…,rN が出力され、受信処理端末121 ,122 ,…,12N で処理が行われ、受信データ(IQデータu1 ,u2 ,…,uN )が生成される。IQデータu1 ,u2 ,…,uN のうち、たとえばIQデータu1 ,u2 のみが信号処理負荷調整手段(ネットワークスイッチ13)を経て信号処理端末141 へ送出され、目標検出データv1 ,v2 が生成されて表示処理装置4へ送出される。また、IQデータuN のみがネットワークスイッチ13を経て信号処理端末14M へ送出され、目標検出データvN が生成されて表示処理装置4へ送出される。表示処理装置4では、目標検出データv1 ,v2 ,…,vN に基づいて処理されて表示される。
(もっと読む)
誘導装置
【課題】 従来の誘導装置は、目標に向けて垂直偏波と水平偏波の電波を送信して、目標から反射してきた信号を受信し、受信信号を偏波信号処理することでクラッタ信号の中から偏波特性の違う目標信号を検出して追尾する。しかし、海上の波が複数の周期性を含む場合には、クラッタの偏波特性があいまいとなって、偏波信号処理によるクラッタ抑圧効果が得られず、目標信号を検出できないという課題があった。
【解決手段】 水平偏波及び垂直偏波を同時受信する偏波共用アンテナと偏波検出処理を有し、誘導装置が偏波信号処理によってクラッタ信号の中から目標信号を検出する際に、予めドップラ信号処理によってクラッタの周波数成分を分解してクラッタの偏波特性のあいまいさを低減する。これにより、偏波信号処理時の目標検出性能を向上することを可能とした。
(もっと読む)
物標を探知して表示する装置
【課題】海面反射領域を適切に自動検出して、海面反射領域内と海面反射領域外とでそれぞれに応じた異なるスキャン相関処理を自動選択して実行する。
【解決手段】海面反射領域検出部10は、エコーデータに準じて、当該エコーデータに対応する画素が不安定画素であるかどうかを検出する。海面反射領域検出部10は、不安定画素に対して、時間的な不安定状態の延長、および平面的な不安定画素の領域の拡大を行った後に、海面反射領域を決定する。連続性検出部9は、エコーデータに対応する画素の平面的連続性を検出する。Wデータ発生部6は、海面反射領域の内外、連続性の有無に基づいて設定される複数種類の係数からなるスキャン相関処理演算を用いて、今回のエコーデータと画像メモリ7に記憶された前回のスキャン相関処理結果データとから今回のスキャン相関処理結果データを算出し、画像メモリ7へ更新記憶させる。
(もっと読む)
目標類別装置及び目標類別方法
【課題】 距離の異なる複数の目標を観測する場合、距離によって観測点間での目標に対する入射角の変化が異なるため、入射角の変化が大きくなりすぎるとクラッタ信号だけでなく目標信号の強度も低下してしまうという。
【解決手段】 目標までの距離に応じて目標レンジの切出し処理に利用する観測領域を設定する処理領域設定部を備え、観測領域内で取得した観測信号をデータベースから抽出し、抽出した観測信号を用いて目標の類別処理を行うようにした。処理領域設定部は、目標と観測信号を取得した自己位置のなす角度に基づき、観測領域を設定するようにした。
(もっと読む)
目標検出装置
【課題】小さい演算規模であるにも拘わらず目標の誤検出および不検出を防止できる目標検出装置を提供する。
【解決手段】空中線部1からのレーダ受信信号をA/D変換部2で量子化してデジタルビデオ信号に変換し、コヒーレント積分部3にてコヒーレント積分を行い、距離/方位間引き部4においてデジタルビデオ信号を間引いた後に、減衰部5で減衰マップの減衰レベルに従い信号強度を減衰する。その後、閾値算出/二値化部6で、Pタイル法により、デジタルビデオ信号で示される一定領域内のヒストグラムを作成し、上位P%が閾値を超えるような閾値を使用して二値化を行う。そして、ブランク部7で検出不要領域の信号強度を「0」とし、収縮/膨張部8で収縮処理と膨張処理を行って孤立したクラッタを除去した後、クラスタリング部9で連続する「1」の領域を1つの目標とみなし、検出目標データとして出力する。
(もっと読む)
レーダ信号処理装置
【課題】 一定時間間隔でレーダ信号処理装置にデータが入力されるが、レーダ信号処理装置で同時に信号処理可能なデータ数以上の数のデータが入力される場合、信号処理を割り当てる演算部が信号処理中のため割当できず、入力されたデータのシステム的な重要度に関わらず破棄され、その場合にシステム的に重要度が高いデータ破棄されることにより、信号処理ができないことが問題となる。
【解決手段】 レーダ信号処理装置内の信号処理結果から、将来入力されるデータの入力および信号処理時間を予測し、入力されるデータを予測する度に信号処理を実施する演算部の稼働率が向上するように割当を変更することで、データの信号処理終了時刻が早くなり、かつ処理データ数を最大とする計画的な負荷分散制御を行う。
(もっと読む)
スキャン相関処理装置、レーダ装置、及びスキャン相関処理方法
【課題】レーダ映像の分解能を向上させる場合においても、スキャン相関処理におけるメモリ使用量の増加を抑制する。
【解決手段】スキャン相関処理装置は、1回前に算出された出力値に対応する級を選択するとともに、入力されるスイープデータ値に対応する級を選択する級選択部と、出力値に対する級と、スイープデータ値に対する級との組合せそれぞれに、出力値を算出する演算を示す命令コードを対応付けた命令テーブルを予め記憶している命令記憶部と、級選択部が選択した1回前に算出された出力値に対応する級と、入力されるスイープデータ値に対応する級との組合せに応じた命令コードを命令記憶部から読み出す命令コード読出部と、命令コード読出部が読み出した命令コードに基づいて、1回前に算出された出力値、及び入力されるスイープデータ値から出力値を算出する演算部とを備える。
(もっと読む)
目標検出装置、誘導装置及び目標検出方法
【課題】少ないアンテナ数、低SNRで、目標の動揺がある場合でも、目標のクロスレンジ方向を含む形状を推定することが可能な目標検出装置、誘導装置及び目標検出方法を提供する。
【解決手段】目標検出装置は、レーダ部、主要反射位置抽出部、パワー記録部、変動幅判定部、頻度カウント部及び相対広がり算出部を具備する。レーダ部は、レンジ測定範囲内で有意な振幅を示す複数のレンジ、及び、有意な振幅の振幅値を取得する。主要反射位置抽出部は、レンジ及び振幅値の受信状況に基づき、目標内の主要反射位置を選定する。パワー記録部は、主要反射位置毎の振幅値を処理期間の間記録する。変動幅判定部は、記録された振幅データの変動幅が閾値を超える主要反射位置の振幅データを出力する。頻度カウント部は、出力された主要反射位置の振幅データの変動頻度を計測する。相対広がり算出部は、主要反射位置及び変動頻度から、目標内の位置及び相対的な広がりを求める。
(もっと読む)
レーダ信号処理支援装置およびレーダ信号生成装置
【課題】本発明は、レーダ信号処理支援装置およびレーダ信号生成装置に関し、構成の複雑化や大規模化を伴うことなくクラッタ源から到来した受信波の成分の抑圧を可能とすることを目的とする。
【解決手段】パルス幅および占有帯域幅が異なる複数pのパルス波の反射波としてそれぞれ到来した第1ないし第pの受信波に前記複数pのパルス波に個別に整合した処理を施し、第1ないし第pのパルスを得る受信処理手段と、前記第1ないし第pのパルスにレベル補正を施すことにより前記第1ないし第pのパルスの瞬時値の特定の極大値を揃え、前記レベル補正の下で得られた第1ないし第pのパルスの瞬時値を値の降順に小さい重みとの積和の列としてレーダ信号処理または指示の対象とするクラッタ抑圧手段とを備える。
(もっと読む)
精測進入レーダ、精測進入レーダ制御方法およびその制御用プログラム
【課題】着陸誘導対象機の検出を安定して実施する。
【解決手段】ASR40から取得した追尾目標データDおよびSSR50から取得した追尾目標データEに基づいて進入機情報をレーダ表示手段30に表示し、オペレータによって誘導対象機が選択されると選択された航空機の進入機情報に基づいて目標物検出手段10で検出する対象機のドップラ周波数の予測値および予測位置を追尾管理制御部21が算出し、算出したドップラ周波数が中心周波数となるようなフィルタ係数をフィルタ係数制御部14が算出し、フィルタ係数制御部14が算出したフィルタ係数を目標物検出フィルタ11に設定する。追尾管理制御部21は、電波の送信方向が予測位置に向くように設定された電子走査式アンテナ1を介して電波を出力すると共に電波の反射を受信する。受信した反射波から目標物検出フィルタ11で航空機の反射信号である目標物信号を抽出する。
(もっと読む)
レーダ信号処理装置
【課題】 従来のV−chirp方式では、クラッタ環境化において目標からの受信信号のパルスのピークがクラッタ信号に覆われて、目標を検知できない可能性があり、これを改善することのできるレーダ信号処理装置を得る。
【解決手段】 レーダ信号処理装置は、アップチャープまたはダウンチャープの変調をかけた偏波信号を目標に対して送信し、目標からの反射波を偏波受信し、A/D変換により得られた受信ビデオ信号に偏波信号処理を施すことにより、クラッタを抑圧し、抑圧後の受信ビデオ信号をパルス圧縮し、パルス圧縮により生成された信号から目標までの距離を算出し、アップチャープ受信ビデオ信号及びダウンチャープ受信ビデオ信号をパルス圧縮することにより得られた信号の強度に基づく距離の差から、目標との相対速度、相対距離を算出することができる。
(もっと読む)
1 - 20 / 151
[ Back to top ]