
Fターム[5J070AK22]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 高精度化又は分解能の向上 (1,641)
Fターム[5J070AK22]に分類される特許
201 - 220 / 1,641
超広帯域パルス・センサ
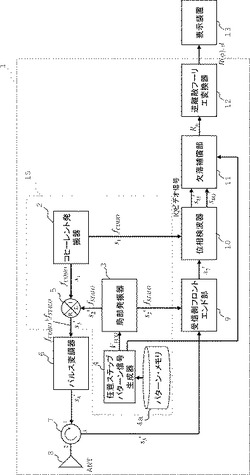
【課題】外部の干渉波の影響を除去でき、目標物までの距離検出精度の高いUWBパルス・センサの提供。
【解決手段】探知波生成部15は、周波数fmin〜fmaxを間隔Δfで等分した全周波数点集合から使用周波数点集合を含む周波数点を離散周波数点系列に従って並べ、探知波を順次発振する。探知波が目標物で反射された反射波は、受信後、位相検波器10で位相検波され周波数点に対する位相点系列が生成される。欠落補償部11は、各位相点に対応する周波数点の昇順又は降順で並べ替え、欠落した周波数点に対応する位相点を補間し、補間された位相点系列を算出する。逆離散フーリエ変換部12は、補間された位相点系列を逆離散フーリエ変換しレンジ・スペクトルを生成し、レンジ・スペクトルのピークの位相値からアンテナから目標物までの距離を算出する。
(もっと読む)
レーダ装置

【課題】自レーダユニットの受信信号レベルに対する他レーダユニットからの干渉信号レベルを効果的に抑圧し、当該抑圧に必要な測定時間及び付加回路の増大を回避する。
【解決手段】第1レーダ送信部は、第1送信トリガ信号生成部が所定の同期確立信号の受信時から第1遅延時間経過後に生成された第1送信トリガ信号に基づいて、第1送信符号制御部の制御の下で、第1レーダ送信信号を第1送信周期で周期的に送信する。第2レーダ送信部は、第2送信トリガ信号生成部が当該同期確立信号の受信時から第2遅延時間経過後に生成された第2送信トリガ信号に基づいて、第2送信符号制御部の制御の下で、第2レーダ送信信号を第2送信周期で周期的に送信する。第1遅延時間及び第2遅延時間に応じて、第1レーダ送信部及び第2レーダ送信部からの各干渉信号の到来時が第2レーダ送信信号及び第1レーダ送信信号の各送信区間内となる。
(もっと読む)
送受信装置及び同期システム
【課題】2つの送受信装置の間の同期確立と距離を測定する
【解決手段】他の第2送受信装置に対して第1信号を送信し、第2送受信装置において受信した第1信号を折り返して第2信号として返信して、フェズドロックループ(PLL)により同期をとる送受信装置である。基準信号を出力する基準発振器と、送信ベースバンド信号を発生する、位相と周波数が可変の信号発振器と、送信ベースバンド信号により搬送波を変調して得られる第1信号を送信する送信器を有する。第2送受信装置から受信した第2信号を復調して受信ベースバンド信号を得る受信器と、送信ベースバンド信号と基準発振器の出力する基準信号との第1位相差を検出する第1位相比較器と、受信ベースバンド信号と基準発振器の出力する基準信号との第2位相差を検出する第2位相比較器と、第1位相差と第2位相差との絶対値の差を出力する比較器とを有する。比較器の出力が零となるように、信号発振器の位相と周波数をフィードバック制御した。
(もっと読む)
障害物認識装置
【課題】車両の進行方向の速度変化と共に車両の進行方向と垂直な左右方向の速度変化も判断することで、障害物検出率の向上を図った障害物認識装置を提供する。
【解決手段】レーダを介して検出した物標について、物標の情報と車両の走行情報とに基づき、車両の進行方向に関する絶対速度及び車両の左右方向に関する絶対速度の両方を判断する。両方の絶対速度が所定の基準値以下であると判断された場合、すなわち物標が路面を移動していないと判断された場合に限り、レーダ検出によって得られる情報とカメラ等によって撮像される画像情報とをフュージョンした情報を用いて物標の立体物判断を行う。いずれかの絶対速度が所定の基準値を超える場合には、レーダ検出によって得られる情報のみによって物標の立体物判断を行う。
(もっと読む)
レーダ装置
【課題】目標物体の誤検出を起こさないレーダ装置を提供する。
【解決手段】送信部10からFMCW波をレーダ波として送信させ、目標物体に反射したレーダ波を複数の受信アンテナ22で受信し、レーダ波の受信信号及び送信信号と同じ周波数を有するローカル信号に基づいてビート信号を受信器24で生成し、信号処理部30では、ビート信号を所定のサンプリング周期Tsでサンプリングし、アップビート信号Buとダウンビート信号Bdのピークのペアマッチにより、目標物体の位置情報を導出する。このとき、信号処理部30では、サンプリング周期Tsの1/4の時間間隔tcで、複数の受信器24を配列順に選択する。
(もっと読む)
イメージング装置及びイメージング方法
【課題】近傍界イメージングにおいて、イメージング像の高分解能化を可能とする。
【解決手段】送信回路12からミリ波を出力させて送受信アンテナ14から放射し、受信回路13により、観測対象物3の表面で反射したミリ波を送受信アンテナ14を介して測定信号として受信し、測定信号のIQ値から反射信号のIQ値を算出するオフセット補正関数の未知数を求めてオフセット補正関数を導出し、測定信号のIQ値からオフセット補正関数で算出した反射信号のIQ値を引いて散乱信号のIQ値を求める。これにより、イメージング像の高分解能化が可能となる。
(もっと読む)
距離測定装置
【課題】計算量が少なく、かつ距離の算出精度を十分に高めることができる距離測定方法を用いた距離測定装置を提供することを目的とする。
【解決手段】受信手段と、測定部21と、記憶部22と、演算部(距離演算部)17と、を備え、演算部17は、記憶部22から取り出した振幅測定値を処理して、隣接チャンネルを含む周辺チャンネルよりも振幅が小さくなる極小値を検出し、隣接チャンネル間で高域側チャンネルの位相から低域側チャンネルの位相を差し引いた隣接チャンネル間の位相差を周波数軸方向に配列してなる位相差曲線において前記振幅極小値が検出されたチャンネル付近の極値が極大値であれば、その時に測定された前記位相差を用いて距離演算を行い、前記極値が極小値であればその時に測定された位相差は距離演算から排除することを特徴とする。
(もっと読む)
レーダ装置、車両制御システム、信号処理装置、及び、物体検出方法
【課題】物体の位置を正確に検出する技術を提供する。
【解決手段】ビート信号に基づいて、ビート信号に含まれる波の周波数及び信号レベルを示すピーク信号を導出する。そして、ピーク信号の下端となる第1周波数と上端となる第2周波数との間を互いに異なる補正率が設定された複数のパートに区分し、複数のパートのうちピーク信号が属するパートの補正率でピーク信号を補正し、補正されたピーク信号に基づいて、物体の位置を検出する。また、ピーク信号の第1周波数及び第2周波数の近傍においては、第1周波数及び第2周波数の中央の近傍よりも、一つのパートとする周波数の幅を狭くする。これにより、第1周波数及び第2周波数近傍のピーク信号の補正を細分化して行うことができ、物体の位置を正確に検出できる。
(もっと読む)
レーダ装置
【課題】対象物の水平方向と鉛直方向の両方の角度を検出できるレーダ装置を得る。
【解決手段】全てのアンテナは、水平面と直角となる平面である鉛直面に配置され、かつ長方形である開口面の長手方向が鉛直方向に配置され、受信アンテナRx1、Rx2は、素子間隔Lhで水平方向に配置され、送信アンテナTx1、Tx2は、受信アンテナRx1、Rx2を挟むように、水平方向に配置され、受信アンテナRx3、Rx4は、素子間隔Lvで鉛直方向に配置され、かつ、送信アンテナTx2に隣接して水平方向に配置され、送信アンテナTx1、Tx2から時分割に高周波パルス信号を送信させ、受信アンテナRx1、Rx2によって受信された2つの受信信号の位相差から水平方向の方位角を検出するとともに、受信アンテナRx3、Rx4によって受信された2つの受信信号の位相差から鉛直方向の仰俯角を検出する信号処理器10を備える。
(もっと読む)
障害物検知装置
【課題】光、電波、超音波等の信号波を用いる障害物検知装置において、低コストな構成により、障害物までの距離を精度良く測定可能とする。
【解決手段】本装置1は、正弦波状の信号波を生成する信号生成部2と、信号波を送信する送信部3と、信号波の対象物からの反射波を受信する受信部4と、サンプリング部5と、演算部6とを備える。サンプリング部5は、受信部4で受信された反射波の信号強度を標本化して標本列を取得する。演算部6は、標本列に振幅と位相差をパラメータとする正弦波をフィッティングさせることにより信号波と反射波の位相差θを求める。標本列のフィッティングという統計的な処理に基づくので、ノイズなどの測定上の影響の少ない位相差を求めることができる。また、位相差に基づいて距離を求めるので、高価な高速回路によらずに障害物までの距離を精度良く求めることができ、低コストの障害物検知装置を実現できる。
(もっと読む)
RFIDシステム用検知安定化システム、検知安定化方法および検知安定化用プログラム
【課題】利用環境もしくは利用方法に制限を設ける必要なく検知安定化が実現できるRFIDシステムを提供すること。
【解決手段】本発明は、RFID用検知安定化システムであって、複数の検知エリアに設置されたセンサと、前記センサの情報に基づいて、各検知エリア内の検知対象の動きの量を検出する動き検出手段と、前記動き検出手段で得られた動きの量からエリア検知処理に利用するためのパラメータを決定するパラメータ決定手段と、前記パラメータ決定手段で決定されたパラメータに基づいて検知対象用ID保持装置のエリア検知結果を安定化するエリア検知処理手段とを有することを特徴とするRFID用検知安定化システムである。
(もっと読む)
障害物検知装置
【課題】光、電波、超音波等の信号波を用いる障害物検知装置において、低コストな構成により、障害物までの距離を精度良く測定可能とする。
【解決手段】本装置1は、正弦波状の信号波を生成する信号生成部2と、信号波を送信する送信部3と、信号波の対象物からの反射波を受信する受信部4と、サンプリング部5と、演算部6とを備える。サンプリング部5は、受信部4で受信された反射波の信号強度を標本化して標本列を取得する。演算部6は、標本列における同位相標本点毎の平均値を求め、平均値のうち互いに位相が90°異なる2つの平均値に基づいて信号波と反射波の位相差θを求める。標本列の平均値を求める統計処理に基づくので、ノイズなどの測定上の影響の少ない位相差を求めることができる。また、位相差に基づいて距離を求めるので、高価な高速回路によらずに障害物までの距離を精度良く求めることができ、低コストの障害物検知装置を実現できる。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】分解能メッシュと、地域メッシュの重なる面積に応じて地域メッシュの目標物の数量を求め、目標物の数量の管理を向上させる目標物管理装置および目標物管理方法を提供する
【解決手段】目標物が所在しているか否かを検出し、目標物が所在するときは分解能メッシュ各々における目標物の数量を求める検出部と、目標物が所在する第1のメッシュと重なる、監視対象範囲を予め設定した一定の領域で分割した範囲である第2のメッシュを抽出し、抽出された第2のメッシュと重なる目標物が所在する第1のメッシュの目標物の数量を分配し、抽出された第2のメッシュに関連付ける分配部と、地域メッシュ各々に分配された目標物の数量の総和を、地域メッシュ各々で求める算出部と、を備える目標物管理装置である。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】設定した次数内における適切な信号受信波数の設定を行い、精度の良い方位検出ができる電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】周波数分解処理部がビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解されたビート信号に基づいた複素数データを算出する。方位検出部がビート信号に基づいて算出された複素数データを要素とする正規方程式の構成部である行列の固有値に基づいて受信波の波数を推定し、該推定された波数に応じた数の固有値と固有ベクトルに基づいて作成される信号部分空間の正規方程式の解として算出される係数を作成し、該作成された係数に基づいて受信波の到来方向を算出する。
(もっと読む)
近接センサ
【課題】感度を安定させ、静電気などによる外乱による計測値のエラーを回避することを可能とする近接センサを提供する。
【解決手段】近接センサ1aは、発振器2と、発振器2の信号に基づいて交流信号Eaを放射する送信アンテナ3と、交流信号Ebを受信する受信アンテナ4とを備える。また、近接センサ1aは、近接センサ1aは、被検査領域からの交流信号Ebを受信する受信アンテナ4と、送信アンテナ3と受信アンテナ4を電気的に接続する抵抗7を備える。抵抗7により、発振器2からの信号は移相される。さらに、近接センサ1aは、受信アンテナ4の出力を増幅する増幅器8と、発振器2の出力信号で、受信アンテナ4で受信した信号を位相検波する位相検波器9を備える。さらに、近接センサ1aは、位相検波器9の出力を平滑化するLPF(ローパスフィルタ)10と、出力端子11を備える。
(もっと読む)
障害物認識装置及び障害物認識方法
【課題】高い精度で障害物を認識することができる障害物認識装置を提供する。
【解決手段】本発明の一実施形態に係る障害物認識装置1は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段11と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段12と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段22と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段24と、を備える。
(もっと読む)
イベント検出装置
【課題】電波の状態を監視することによって、監視対象が所定のエリア内のどこにいるのかを正確に識別することができる高い精度を持つイベント検出装置を提供すること。
【解決手段】複数のアンテナ21によって受信した信号を受信ベクトルから相関行列を演算する相関行列演算手段22と、該相関行列を固有値展開して信号部分空間を張る固有ベクトル及び該固有ベクトルに対応する固有値を演算する固有値展開手段23と、該固有ベクトル及び固有値の分散をそれぞれ演算する分散演算手段24と、該固有ベクトル及び固有値と前記分散を入力してイベントを判別するサポートベクターマシン機能25と、該イベントに基づいてイベントを検出するイベント検出手段26とを備えるイベント検出装置。
(もっと読む)
レーダ装置
【課題】ターゲットが移動する場合でも当該ターゲットからの反射波の信号における低レンジサイドローブ特性を維持し、複数のセクタレーダ間における干渉を低減する。
【解決手段】第1セクタレーダは、第1送信周期で第1符号系列を変調した信号、第2送信周期で第2符号系列を変調した信号、第3送信周期で第1符号系列を変調した信号、第4送信周期で第2符号系列を変調した信号を生成する。第2セクタレーダは、第1送信周期で第2符号系列を変調した信号、第2送信周期で第1符号系列と逆極性の第3符号系列を変調した信号、第3送信周期で第2符号系列と逆極性の第4符号系列を変調した信号、第4送信周期で第1符号系列を変調した信号を生成する。第1、第2セクタレーダは、生成された各信号を第1、第2送信アンテナからそれぞれ送信する。
(もっと読む)
位置検知システムおよび位置検知方法、信号計測装置
【課題】動局装置が通信フレームを基地局装置へ送信してから、その後に通信フレームを前記基地局装置から受信するまでの時間差と、基地局装置が移動局装置から通信フレームを受信してから、その後に通信フレームを移動局装置へ送信するまでの時間差とに基づいて、移動局装置と基地局装置との距離を算出し、移動局装置の位置を検出する位置検知システムにおいて、通信フレームのうちの開始フレームと終了フレームの時間差の計測精度を向上させる位置検知システムを提供する。
【解決手段】複数のカウンタで入力した識別番号付加済みの開始フレームのそれぞれの識別番号が一致しているかを判定し、一致していない場合には、開始フレームの受信タイミングの検出に利用したクロックから、終了フレームの受信タイミングの検出に利用したクロックまでに入力したクロック数に基づく時間差の算出の無効を示す信号を出力する。
(もっと読む)
レーダ装置
【課題】誤ペアリングの発生を防止するとともに、ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合であっても、ターゲットまでの距離およびターゲットとの相対速度を得ることができるレーダ装置を得る。
【解決手段】ターゲット推定部20は、ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合に、ターゲット確定部13において前回のサイクルで確定されたターゲット21、22までの距離ROおよびターゲット21、22との相対速度VOに基づいて、ターゲット21、22までの距離RNおよびターゲット21、22との相対速度VNを推定する。
(もっと読む)
201 - 220 / 1,641
[ Back to top ]