
Fターム[5J070AK22]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 高精度化又は分解能の向上 (1,641)
Fターム[5J070AK22]に分類される特許
41 - 60 / 1,641
信号生成回路、発振器、レーダー装置
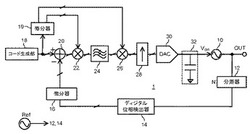
【課題】低雑音で高周波数精度かつ高線形なFMCW信号を得ることのできる信号生成回路、レーダー装置を提供すること。
【解決手段】実施形態の信号生成回路は、アナログ制御信号により周波数が制御される発振器を有する。また、ディジタル位相検出部と、第1の微分部と、ディジタルの周波数誤差情報を出力する比較部とを有する。また、周波数設定コードを微分して該周波数設定コードの傾きに対応する利得値と該利得値の逆数とを生成する第2の微分部と、ディジタルの周波数誤差情報に利得値を乗算する第1の乗算部と、乗算結果の高周波成分を除去するローパスフィルタ部と、ローパスフィルタ部の出力に利得値の逆数を乗算する第2の乗算部とを備える。そして、乗算結果をアナログの周波数誤差情報に変換するD/A変換部と、積分してアナログの位相誤差情報に変換し、該アナログの位相誤差情報をアナログ制御信号として出力する積分器とを備える。
(もっと読む)
目標運動推測システム及び方法

【課題】各探信の度に目標の速度及び該速度の時間変化を取得できる目標運動推測システム及び方法を提供する。
【解決手段】未知のパラメータである目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、該未知のパラメータ数と同数以上のセンサの観測データから得られる目標のドップラー速度を成分とするドップラーベクトルを生成し、さらに各センサの観測データから得られる目標の方位及び該目標からの波の発信時刻を用いて未知のパラメータ数と同数の成分を有する方位行列を生成する。そして、速度パラメータベクトルをドップラーベクトルと方位行列の乗算結果で示す連立方程式を構築し、この連立方程式を解くことで、未知のパラメータである目標の速度成分及びその時間変化成分を求める。
(もっと読む)
パッシブレーダ装置
【課題】演算負荷の増加やコスト高を招くことなく、直接波の相互相関成分を十分に抑圧して、精度よく目標を探知することができるようにする。
【解決手段】REF系DFT処理部16により算出された周波数スペクトルzref(f)を用いて、受信信号ベクトル形成部17により形成された受信信号ベクトルxに含まれている直接波の相互相関成分α0Da0を抑圧し、直接波抑圧後の受信信号ベクトルxnullを出力する直接波抑圧部18とを設け、IDFT処理部19が、直接波抑圧部18から出力された直接波抑圧後の受信信号ベクトルxnullをIDFTして、間接波の相互相関成分ynullを算出する。
(もっと読む)
埋設されたICタグの位置特定方法
【課題】構造物に埋設されたICタグの二次元的な位置を容易に特定する。
【解決手段】構造物に埋設されたICタグの、前記構造物の表面における二次元的な位置を特定する位置特定方法であって、前記ICタグからの信号を受信可能な指向性を有する受信部を、第1の移動として、前記表面の法線方向を除く第1方向に直線移動、または、回転移動させて前記信号を受信する第1受信ステップと、前記受信部を、第2の移動として、前記表面の法線方向及び前記第1方向を除く第2方向に直線移動、または、前記回転移動の軸と異なる軸を中心とする回転移動をさせて前記信号を受信する第2受信ステップと、前記第1受信ステップにて受信した前記信号と、前記第2受信ステップにて受信した前記信号とに基づいて、前記ICタグの位置を特定する位置特定ステップと、を有する。
(もっと読む)
データ解析装置、レーダ装置、およびデータ解析方法
【課題】サンプリング値に対するデータ解析を行うデータ解析装置において、サンプリング値を時系列に従って並べた時系列データにおける複数のピーク値の位置を正確に推定できるようにする。
【解決手段】レーダ装置においては、複数のサンプリング値を時系列に従って並べた時系列データにおいてサンプリング値の極大値および極小値を検出し(S10)、極小値として得られたサンプリング値以上の値を基準値として、この基準値よりも大きな値を有するサンプリング値のうちの時系列データにおいて互いに隣接するものをそれぞれグループとし、これらのグループ毎に入力信号が最大となるピーク位置を推定する(S20)。このようなレーダ装置によれば、極小値を変更することなく基準値を設定し、ピーク位置を推定することができるので、各ピーク位置を正確に推定することができる。従って、精度よく物標までの距離を検出することができる。
(もっと読む)
受信装置および受信方法
【課題】マルチパス環境においても良好な受信性能が得られる受信装置を得ること。
【解決手段】モードS信号を受信する受信装置であって、受信信号を直交検波する直交検波部2と、直交検波後の受信信号に対して周波数オフセットを補償する周波数補償部5と、周波数オフセットの補償後の受信信号に基づいて先行波の到来時刻である先行波到来時刻を推定する先行波検出部3と、周波数オフセットの補償後の受信信号のプリアンブル部と先行波到来時刻とに基づいて、伝搬路の推定を行う伝搬路推定部6と、伝搬路推定部6による推定結果に基づいて、周波数オフセットの補償後の受信信号に対してマルチパスによる歪みを補償する等化処理を行い、等化処理結果に基づいてビット判定を行う等化部7と、を備える。
(もっと読む)
フェイズドアレーアンテナのブランチ間補正装置及びフェイズドアレーアンテナのブランチ間補正方法
【課題】回路規模を増大することなく、フェイズドアレーアンテナを構成する各アンテナに対応して設けられた各ブランチにおける高周波信号間の位相誤差を高精度に補正する。
【解決手段】フェイズドアレーアンテナのブランチ間補正装置は、変調部と、遅延部と、ミキサ部と、アンテナとを含むブランチを複数有し、更に、隣接する各々のブランチからの2つの高周波信号を基に周波数変換する周波数変換部と、周波数変換部からの出力信号を基にDC成分を抽出するフィルタ部と、フィルタ部により抽出されたDC成分を基に、ブランチの遅延部における所定の位相遅延量を判定する遅延制御部と、を備える。遅延制御部は、隣接する各々のブランチのうちいずれかの遅延部に、いずれかのブランチにおいて変調された送信信号の位相を、判定された所定の遅延量ほど遅延させる。
(もっと読む)
距離,速度測定装置
【課題】測定周期毎に、送信波を反射した物標との距離(ひいては速度)を可能な限り精度良く求めることができる距離,速度測定装置を提供する。
【解決手段】受光チャンネルCHi(i=1〜4)のそれぞれについて一発測距回路321と積分測距回路322とを並行して動作させ、受光チャンネルCHiから得られる受信信号Riが上閾値より大となる一発測距領域では一発測距回路321による第1測距値D1を、受信信号Riが下閾値以下となる積分測距領域では積分測距回路322による第2測距値D2を、受信信号Riが下閾値より大且つ上閾値以下となる中間領域では、両測距値D1,D2の加重平均値を距離データDとして生成する。
(もっと読む)
移動体通信システムおよび移動体ならびにそのビームの方向制御方法
【課題】 GPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を計算しなければならない環境下において、送信側移動体が受信側移動体の方向に的確にビームを照射することが可能な移動体通信システムの提供。
【解決手段】 ペンシルビームを用いて移動体1〜4間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御部24と、受信側移動体が送信ビームを受信し、受信した送信ビームに基づきモノパルス測角を行うモノパルス測角部34と、受信側移動体から送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知部35とを含み、ビーム制御部24は受信側移動体から取得した測角誤差値に基づきペンシルビームの照射方向を補正する。
(もっと読む)
位置情報管理システム
【課題】無線通信を利用して、車両等の移動体の位置情報を特定し、移動体に関連付けられた情報を取得することのできる位置情報管理システムを提供する。
【解決手段】自機の識別情報を含むビーコン信号を無線送信する複数のビーコン発信器であって、隣接するビーコン発信器とビーコン信号の出力範囲が一部重なるように管理すべきエリアに分布して配置されるビーコン発信器20と、移動体に搭載される端末装置であって、ビーコン信号を受信し、受信された各ビーコン信号から識別情報を抽出し、各ビーコン信号の受信信号強度を測定して、得られたビーコン信号の識別情報と受信信号強度を自機の識別情報に関連付けた端末信号を無線送信する端末装置30と、前記端末信号を受信し、受信された端末信号に含まれる端末装置の識別情報と、ビーコン発信器の識別情報及び受信信号強度に基づいて、端末装置の位置を特定する主装置40と、を含む。
(もっと読む)
信号処理装置、レーダ装置、および、信号処理方法
【課題】送信波の出力時間を短縮化して物体の角度検出精度を向上させることを目的とする技術に関する。
【解決手段】
ビート信号をAD変換してデジタルデータを導出し、デジタルデータを複数のデータ群に分割する。次に、データ群を高速フーリエ変換してデータ群の数に対応する複数の変換データを取得し、変換データを複数の組に分けて組ごとの相関行列を取得して、相関行列を平均した値を算出する。そして、相関行列を平均した値に基づいて検知点の角度を演算する。これにより、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
(もっと読む)
2チャネル追尾装置、および追尾方法
【課題】衛星位置検出の精度の低下を防止する、2チャネル追尾装置および追尾方法を提供する。
【解決手段】追尾装置1は追尾信号から和信号と差信号を生成し、和信号を信号発振器14が生成する変調信号で抑圧搬送波振幅変調を行い、変調和信号と差信号を合成する。和信号と合成信号を増幅し、中間周波数に変換し、伝送する。AGC回路20は和信号を増幅し、AGC回路21は和信号の利得との差分が所定の範囲内になるよう合成信号を増幅する。検波器24と検波器23は、和信号と90°移相した和信号でそれぞれ合成信号を位相検波し、追尾誤差信号の同位相成分と直交位相成分を検出する。同期検波器26と同期検波器25は、同位相成分と直交位相成分を変調信号で同期検波し、伝送された変調信号の同位相成分と直交位相成分を検出し、伝送中の位相変動αと振幅変動Aを算出する。αとAに基づき追尾誤差信号の直流成分を補正し、アンテナ駆動部などに送る。
(もっと読む)
信号トランスポンダ
【課題】高精度で信号の周波数範囲を変換し、遠隔信号キャラクタリゼーションに適用可能なトランスポンダを提供することである。
【解決手段】本発明は、未知の信号源からの信号の周波数変換のための信号トランスポンダであって、未知の信号源から信号を受信するための入力手段と、受信した信号をフィルタリングするための入力フィルタと、受信した信号を増幅するための入力信号増幅器と、増幅されフィルタリングされた、受信した信号の周波数を、所定の周波数に変換するためのミキサと、周波数変換のために、ミキサに供給されるクロック信号を発生させるための局部発振器と、周波数変換された信号をフィルタリングするための出力フィルタと、周波数変換された信号を増幅するための出力信号増幅器と、フィルタリングされ増幅された、周波数変換された信号を送信するための出力手段とを備える、トランスポンダを提供する。
(もっと読む)
対象の一つ以上の運動パラメータを得るための計算機、システム、方法およびコンピュータ・プログラム
【課題】前方散乱レーダーを使用して、飛行する対象の距離パラメータまたは速度を含む対象の軌道を決定する。
【解決手段】対象の運動パラメータ26を得るための計算機20であって、計算機20は、少なくとも2つの時間差で一つ以上の運動パラメータ26を得るように構成される。第1の時間差は対象による送受信機ラインの第1の組の通過のタイミングを示し、第2の時間差は対象による送受信機ラインの第2の組の通過のタイミングを示し、送受信機ラインの第2の組は送受信機ラインの第1の組とは異なる。
(もっと読む)
無線測距装置、無線端末及び無線測距システム
【課題】折り返しパルスの受信レベルが高速に大きく変動する環境においても、適切な利得によって折り返しパルスを受信し、正確に測距する無線測距システムを提供する。
【解決手段】リーダ制御部25は、タグ−リーダ間の距離を検出するために、送信電力、受信ゲインおよび自折り返しパルスの送信レベルの組合せを周期的に切り替える。第1の組合せでは、リーダ制御部25は、送信電力、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「小」、「小」、「大」に設定する。この場合、タグAとタグBでは、リーダ5からの送信パルスの受信レベルが第1の閾値より小さいので、折り返し送信しない。タグCでは、送信パルスの受信レベルが第1の閾値より大きいので、折り返し送信する。第2の組合せでは、リーダ制御部25は、送信電力、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「中」、「中」、「中」に設定する。
(もっと読む)
合成開口を用いるレーダシステム
【課題】合成開口レーダ(SAR)システム、およびSARシステムにおいて信号を処理する方法を提供すること。
【解決手段】SARシステムが、少なくとも1つの部分アンテナを有するレーダアンテナを含み、その少なくとも1つの部分アンテナそれぞれが、割り当てられる送信/受信モジュールを有する複数の位相中心、および位相中心の信号をコヒーレントに処理するための信号プロセッサを含む。信号プロセッサは、位相中心の送信/受信モジュールによって受信されるアナログ受信信号をデジタル化および処理するように、ならびにデジタル的に処理された受信信号をアナログ信号に変換するように構成および配置されるハイブリッドビーム形成モジュールを備える。さらには、アナログ受信ネットワークが、それぞれの送信/受信モジュールのアナログ信号を互いに合成して、出力信号を形成するように構成および配置される。
(もっと読む)
侵入検知システム、侵入検知装置、侵入検知方法および侵入検知プログラム
【課題】電波を用いて所定エリアにおける人間の侵入を検知する構成において、検知可能エリアが狭くなることを防ぐことが可能な侵入検知システム、侵入検知装置、侵入検知方法および侵入検知プログラムを提供する。
【解決手段】侵入検知システム201は、所定エリアに配置され、無線信号を送信するための送信機101と、所定エリアに配置され、送信機101から送信された無線信号を受信し、受信した無線信号に基づいて所定エリアにおける空間特徴量を算出し、算出した空間特徴量に基づいて所定エリアにおける人間の動作を検知するための受信機102とを備える。送信機101は、無線信号の指向性パターンを選択可能であり、複数の指向性パターンの中から、受信機102が受信する無線信号のレベルが最も小さくなる指向性パターンを選択する。
(もっと読む)
送信位置検出装置,方法および送信位置検出システム並びにプログラム
【課題】 迅速にRFIDタグ,RFID読取装置等の無線送信源の位置を検出する。
【解決手段】 一実施形態における送信位置検出装置は、無線送信源から無線送信された信号を受信する4つ以上の受信アンテナと、各受信アンテナが無線送信源から無線送信された信号を受信したときの各受信アンテナ間の時間差を計測し、計測した各時間差に基づいて無線送信源の位置を示す三次元座標を演算する計測部とを備える。
(もっと読む)
侵入検知装置、侵入検知方法、侵入検知プログラムおよび侵入検知システム
【課題】電波を用いて所定エリアにおける人間の侵入を検知する構成において、使用すべき電波と同一または近接する周波数帯の他の電波が多数存在する場合でも、誤検知を抑制する。
【解決手段】侵入検知装置101は、所定エリアにおける複数の装置から送信される無線信号の中から対象無線信号を選択的に受信するための受信部22と、受信部22によって受信された対象無線信号に基づいて所定エリアにおける空間特徴量を算出するための空間特徴量算出部11と、空間特徴量算出部11によって算出された空間特徴量に基づいて所定エリアにおける人間の動作を検知するための検知部12と、対象無線信号が送信されるタイミングを制御するためのタイミング制御部14とを備える。受信部22は、タイミング制御部14によって制御されたタイミングに従って、無線信号の中から対象無線信号を選択的に受信する。
(もっと読む)
3次元デジタル記録システム
【課題】構造物表面の不良箇所を3次元のデジタルデータとして記録する。
【解決手段】本発明に係る3次元デジタル記録システムは、構造物表面の不良箇所に接触している間パルス波を送信する入力装置10と、前記入力装置10からのパルス波を受信すると、パルス波を送信する3個の距離測定装置20と、を備え、前記入力装置10は、前記入力装置10がパルス波を送信した時間と、前記3個の距離測定装置20の各々からのパルス波を受信した時間との差から、前記入力装置10と前記3個の距離測定装置20の各々との距離を算出し、前記距離から前記入力装置10の位置情報を算出する制御部15と、前記位置情報を記憶するメモリ13と、を有する。
(もっと読む)
41 - 60 / 1,641
[ Back to top ]