
Fターム[5J070AK22]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 高精度化又は分解能の向上 (1,641)
Fターム[5J070AK22]に分類される特許
141 - 160 / 1,641
車載用頭部位置検出装置、車載用表示装置及び運転支援装置
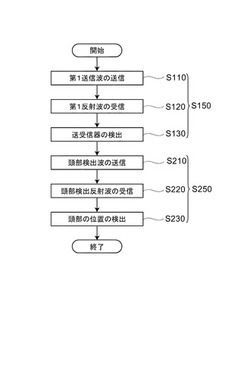
【課題】頭部の位置を正確に検出できる車載用頭部位置検出装置、車載用表示装置及び運転支援装置を提供する。
【解決手段】実施形態によれば、複数の送受信器と送受信制御部とを備えた車載用頭部位置検出装置が提供される。複数の送受信器は、車両に搭乗する搭乗者の頭部に対向する互いに異なる位置に設けられる。複数の送受信器は、頭部に向けて音波及び電磁波の少なくともいずれかの波を送信し、反射波を受信する。送受信制御部は、複数の送受信器に接続される。送受信制御部は、複数の送受信器のいずれかに、送信波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その結果に基づいて頭部に最も近い送受信器を検出する。送受信制御部は、頭部に最も近い送受信器に頭部検出波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その受信結果に基づいて頭部の位置を検出する。
(もっと読む)
レーダ装置及び入射時間推定方法

【課題】RCSが小さい目標からの反射波は電力レベルが低くなり、これを送信源からの直接波との相関演算処理を用いて探知する場合、目標反射波の受信タイミングが得られず送信源からの直接波との入射時間の遅延時間差が求められないという課題があった。
【解決手段】この発明に係るレーダ装置は、受信信号のうちレベルの高い送信源から直接入射する信号の受信タイミングのデータについて0(ゼロ)の値に置き換える0づめ処理を行い、0づめ処理後のデータと送信源からの直接波に相当するデータとの相関演算により相関係数を求めることで、目標反射波を入射する入射タイミングの推定精度を向上させる。
(もっと読む)
車載用のマルチビーム方式レーダ装置、マルチビーム方式レーダ方法およびマルチビーム方式レーダプログラム
【課題】ターゲットに関する検出を高精度に行うことができる車載用のマルチビーム方式レーダ装置を提供する。
【解決手段】車載用のマルチビーム方式レーダ装置101は、送信波を送信し、当該送信波がターゲットによって反射されて到来する受信波を受信するアンテナを構成する複数のビーム素子2−1〜2−Mと、希望の仮想的なアレーアンテナの素子数と素子間隔に対応して、前記複数のビーム素子2−1〜2−Mにより受信した受信波のデータであるビーム素子データをフーリエ変換して、仮想アレーデータを生成し、生成した前記仮想アレーデータに基づいて所定の処理を行う処理部(信号処理部8の方位検出部)と、を備えることを特徴とする。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】過去制御サイクルのデータの使用や取得回数の増加による相関行列等の平均処理をしなくても、ターゲットの分離性能を向上できる。
【解決手段】移動体に搭載される電子走査型レーダ装置100であり、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信部と、送信波及び前記受信波からビート信号を生成するビート信号生成部と、ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理部22と、ビート信号に基づいて算出された複素数データに基づいて、複素数データの初期位相を補正し、補正後の複素数データに基づいて受信波の到来方向を算出する方位検出部28とを備える。
(もっと読む)
レーダ装置
【課題】互いに隣り合う素子アンテナで受信した信号の位相差を用いてターゲット方位の計測を行なう場合、角度アンビギュイティが発生し、レーダ装置としての有効な測角範囲を狭めてしまう。
【解決手段】複数の素子アンテナにより1つの受信チャンネルを構成する場合、互いに隣り合わない位置関係に配置された複数の素子アンテナRX1−1、RX1−2を同一の受信チャンネルとして組み合わせて信号合成することにより、角度アンビギュイティが発生し始める角度をレーダの視野角よりも可能な限り広角へと追いやり、レーダとして有効な測角範囲を最大限確保することができる。しかも複数の素子アンテナは不等間隔で配置されている。
(もっと読む)
気象レーダのビームシャープニング及び逆量子化
【課題】より小さい大きさのレーダ気象システムの距離気象データの表示品質を改善するシステム及び方法を提供する。
【解決手段】プロセッサは、アンテナと関連する量子化反射率データのカラムを気象レーダシステムから受信する。プロセッサは、受信した量子化反射率データのカラムと関連するアンテナよりも大きなアンテナのためのビームパターンと関連する推定される量子化反射率データに基づいて、この量子化反射率データのカラムを調整する。本発明は、制約を緩和するために、概念上の「所望のアンテナ」を利用している。これにより、アルゴリズムが最適解により速やかに収束させ、一方でメモリ要求を低減する。また、所望のアンテナ応答に整合する平滑な摂動関数を利用して最適な平滑出力を提供し、アルゴリズムの収束をより速やかにし、メモリ要求を低減し、かつ出力をスメアーすることなしに量子化に対応する。
(もっと読む)
レーダ装置
【課題】本発明は、レーダ装置に係り、追尾対象の物標を正確に検出することにある。
【解決手段】電波を送信する送信手段と、送信手段から送信される電波の反射波を受信し得る受信手段と、受信手段に受信される信号のうちから反射波の信号レベルと反射波以外の信号レベルとを閾値により区別する受信信号レベル判定手段と、受信信号レベル判定手段により区別された反射波を示す信号に基づいて、物標の距離又は方位を検出する物標検出手段と、物標検出手段により検出される距離又は方位の時間的変化量が所定量以下である物標を追尾対象に、かつ、該時間的変化量が該所定量を超える物標を追尾対象外に、それぞれ設定する物標設定手段と、物標設定手段により設定される追尾対象の物標及び追尾対象外の物標に基づいて、受信信号レベル判定手段にて用いる閾値を変更する閾値変更手段と、を設ける。
(もっと読む)
合成開口レーダーシステムによって取得された入力信号を処理する方法
【課題】本方法は、アジマスアンビギュイティ(azimuth ambiguity:アジマス曖昧性)を制御し、画像モデルを組み込んで飽和したSARデータからの再構成を可能にする。
【解決手段】合成開口レーダー(SAR)システムによって取得された飽和入力信号が、該入力信号を生成した再構成を推定し、推定された再構成から入力信号を再生して再生信号を生成し、該再生信号を入力信号と比較し、推定された再構成を該比較に基づいて調整し、終了条件に達するまで再生するステップから反復することによって処理される。
(もっと読む)
信号測定装置
【課題】突発的に入力される被測定信号の検出確度を高めて、この被測定信号が含まれる周波数帯域に対する高精度な検査をより確実に行う。
【解決手段】測定周波数帯域の被測定信号S1を分配する分配部3と、分配部3からの被測定信号S1aを入力して、測定周波数帯域を連続する3個の周波数帯域に分割した各分割帯域に含まれる各分割帯域内信号S2a〜S2cを並列的に検出する信号検出部4と、指定された分割帯域の周波数帯域幅と同じ周波数帯域幅で第1局発信号S3を掃引し、分配部3からの被測定信号S1bと第1局発信号S3とをミキシングして生成した信号S4を検波して、指定された分割帯域内の分割帯域内信号についての検波出力Vdを生成する受信部5と、信号検出部4で分割帯域内信号S2が検出された分割帯域のうちの1つを指定された分割帯域として受信部5に対して検波出力Vdを生成させる処理部7とを備えている。
(もっと読む)
レーダ装置、レーダ受信装置及び目標検出方法
【課題】 目標が低RCSである場合であっても、目標を検出することが可能なレーダ装置と、このレーダ装置で用いられるレーダ受信装置及び目標検出方法を提供すること。
【解決手段】 レーダ装置は、送信装置、無線部、4次元データ生成部、予測部、積分処理部及び目標検出部を具備する。送信装置は、送信パルスを送信する。無線部は、送信パルスが反射等された反射パルスを受信する。4次元データ生成部は、反射パルスに対してレンジ毎にDFTを行い、周波数ビン毎の周波数バンク信号を生成し、1スキャンにより取得される周波数バンク信号を、レンジと、方位角及び仰角と、相対速度とにより特定される4次元データへ変換する。予測部は、4次元データに基づいて予測4次元データを作成する。積分処理部は、4次元データと、前のスキャンに基づいて作成された予測4次元データとを積分する。目標検出部は、積分結果に基づいて目標を検出する。
(もっと読む)
センサ統合システム及びセンサ統合方法
【課題】複数種類のセンサによる観測データを組み合わせて、目標物の高精度な移動軌跡を抽出する。
【解決手段】プロセッサと、前記プロセッサに接続される記憶装置と、前記プロセッサに接続される出力装置と、を備えるセンサ統合システムであって、前記記憶装置は、複数のセンサによって観測された観測データを保持し、前記観測データはあらかじめ規定された項目のうち選択的に記述された項目を含み、前記プロセッサは複数の前記観測データの選択記述された前記項目を組み合わせ、一つ以上の目標物の移動軌跡を推定し、前記出力装置は、前記移動軌跡を示す情報を出力する。
(もっと読む)
レーダ断面積の計測方法、及びレーダ断面積の計測装置
【課題】 レーダ断面積計測を実施する際に、計測目標と対比するための既知のレーダ断面積を有する基準目標のレーダ反射特性のみを計測し、校正の基準となる信号源からの放射信号を用いた校正を実施することで、高精度に計測目標のレーダ断面積を計測する。
【解決手段】 送受信アンテナから等距離となる位置に、基準目標以外の不要物が存在しないように、送受信アンテナからの距離が気球とは異なる位置で、基準目標を気球に懸吊して、そのレーダ断面積を計測するとともに、基準信号送信ユニットを気球に取り付けて、基準信号送信ユニットからの信号を用いて、レーダ断面積の計測値の校正を行う。
(もっと読む)
目標検出装置およびシステム
【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
(もっと読む)
アンテナ装置、レーダ装置、車載レーダシステム
【課題】単一の基板に形成されているにも拘わらず、180°を越えるような広い検知エリアをカバーできるアンテナ装置、そのアンテナ装置を利用したレーダ装置、車載レーダシステムを提供する。
【解決手段】アンテナ基板6の面方向を主放射方向とする平面放射用アンテナ部3と、アンテナ基板6の端方向を主照射方向とする水平放射用アンテナ部4とを、アンテナ基板6の異なるパターン形成層に形成する。これにより、両アンテナ部3,4を同一のパターン形成層に形成する場合と比較して、水平放射用アンテナ部4の指向性をより部品載置面6b側にシフトさせることができる。その結果、単一のアンテナ基板6でカバー可能な検知エリアを広角化(例えば、180°以上)することができる。
(もっと読む)
信号処理装置
【課題】光学系の結像特性や像流れ等の取得条件によって像に広がりが生じた場合に、その広がりのある目標の信号成分を高精度に算出することができ、目標の信号成分を絶対値として出力することができる信号処理装置を提供する。
【解決手段】信号積算部1は、入力画像5に含まれる入力画素に対して、その画素を中心とする周囲算出範囲内の画素値の和を算出する。ローパスフィルタ部2は、入力画像5から、信号積算部1における算出範囲と同一範囲のオフセット成分算出範囲内で画素値のオフセット成分を算出する。背景積算部3は、ローパスフィルタ部2の算出値と、予め設定された背景係数値6との積を算出する。差信号出力部4は、信号積算部1の算出値と、背景積算部3の算出値との差を算出し、その差の算出値を出力信号7として出力する。
(もっと読む)
レーダ装置及び該レーダ装置における受信電力の算出方法
【課題】高分解機能処理を用いて電波の到来方向を推定する電子スキャン式レーダ装置において、複数物標に対して受信した各到来波の電力を正確に算出する。
【解決手段】所定の角度推定方式を用いて反射波の到来方向の推定を行う電子スキャンを利用した車載レーダ装置において、各アンテナの受信信号から算出した各角度に対するモードベクトルMV1,MV2を求め、受信信号RSのベクトルを当該モードベクトルMV1,MV2の方向に分解し、分解したベクトルPV1,PV2の長さを各物標から到来した反射波の受信電力とする方法である。この方法により、複数の物標があっても、複数の到来波の各電力を正確に算出でき、ペアリングが正確に行えて物標の検出精度が向上し、電子スキャンを利用した車載レーダ装置の誤動作が防止される。
(もっと読む)
物標運動推定装置
【課題】自機の運動状態の変化を受けにくい運動推定結果を出力可能な物標運動推定装置を提供する。
【解決手段】レーダ装置が備える物標運動推定部6は、物標相対座標取得部61と、固定点基準物標座標取得部62と、フィルタ処理部64と、を備える。物標相対座標取得部61は、船舶に搭載され、自船を基準とした物標の相対位置を示す相対座標(Trx,Try)をレーダエコーに基づいて取得する。固定点基準物標座標取得部62は、相対座標(Trx,Try)と、自船の位置と、に基づき、固定点を基準とした物標の位置を示す固定点基準座標(Tax,Tay)を取得する。フィルタ処理部64は、固定点基準座標(Tax,Tay)を入力して物標の運動情報を推定する。
(もっと読む)
車載用レーダ装置
【課題】車両中心軸と走査中心軸との軸ズレ補正処理に要する演算による通常の検出処理への影響を低減し、軸ズレ補正処理を高精度に実行可能な車載用レーダ装置を得る。
【解決手段】車両とターゲットとの距離、ターゲットに対する車両の相対速度、並びにターゲットの位置および方向の少なくとも1つをターゲット情報として検出する車載用レーダ装置1であって、車両の後進状態を検出する車両後進検出部11と、車両の後進距離を検出する後進距離検出部12と、車両の後進時に、車両の旋回情報および後進距離に基づいて、車両の実旋回角度を取得する旋回角度取得部13と、車両の後進時に、ターゲット情報に基づいて、車両の推定旋回角度を算出する旋回角度推定部14と、車両の後進時に、実旋回角度と推定旋回角度との差に基づいて、車両の車両中心軸と車載用レーダ装置1の走査中心軸との軸ズレを補正する軸ズレ補正処理部16とを備える。
(もっと読む)
多目標追尾装置、多目標追尾方法、および多目標追尾プログラム
【課題】追尾ビームを効率的に追尾目標に照射し追尾精度を有効に向上させる。
【解決手段】電子走査アンテナ部101で取得された信号に基づいて、一のビーム照射により検知可能な異なる追尾目標を追尾目標グループとして決定する追尾目標グループ算出部110と、追尾目標グループに含まれる異なる追尾目標間の相互位置関係に応じて追尾用のビームの照射スケジュールおよび照射領域を示すビームパラメータを算出する、追尾ビームパラメータ算出部106と、算出されたビームパラメータに基づき電子走査アンテナ部101によるビーム照射動作の起動スケジュールを決定し、これに基づき電子走査アンテナ部におけるビーム照射動作を制御するアンテナ制御部109を備えた。
(もっと読む)
ウェイト算出方法、ウェイト算出装置、アダプティブアレーアンテナ、及びレーダ装置
【課題】受信データから任意のパルスを選択し、少ない計算量で良好な信号処理利得を実現する不要信号抑圧装置を得る。
【解決手段】アレーアンテナ21で得られたレーダパルスの目標反射信号を受信部22で受信検波し、データ蓄積部23に用意される所定距離相当の長さの処理レンジセルに対して受信タイミングに沿った対応セル位置に記憶する。適応信号処理部27は、ウェイト算出回路271において、不要波のみから形成されると想定されるセルのデータから共分散行列を演算して適応ウェイトを求め、最終的に、ビーム合成回路272において、適応ウェイトによりアンテナ受信信号にウェイト制御を施して出力データとする。上記ウェイト算出回路271において、ウェイト算出に用いる受信パルスを、距離、または、演算時間と信号処理利得の関係から事前に選択、または、目標検出結果から自動的に選択し、演算時間の高速化を図る。
(もっと読む)
141 - 160 / 1,641
[ Back to top ]