
Fターム[5J070AK36]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 自動化 (76)
Fターム[5J070AK36]に分類される特許
41 - 60 / 76
レーダ信号処理装置
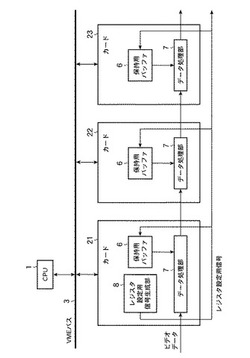
【課題】処理パラメータの設定においてカード間で生じる時間遅延差をなくすことを可能にするレーダ信号処理装置を得ることを目的とする。
【解決手段】複数のカードのそれぞれが、CPUがパラメータ設定指示を行って送信した処理パラメータを一時的に格納しておく保持用バッファを備え、複数のカードのうちの1つが、各カードに割り当てられた処理パラメータが保持用バッファに格納された後にCPUから出されるライトアクセスに応じてパラメータ設定開始信号を生成するパラメータ設定開始信号生成部をさらに備え、各カードの保持用バッファは、パラメータ設定開始信号に基づいて、格納されていた処理パラメータをそれぞれの対応するデータ処理部に一斉に設定するようにしたものである。
(もっと読む)
パッシブコヒーレント探索アプリケーションにおいて測定領域データを関連付けるシステムおよび方法

【課題】パッシブコヒーレント探索システムにおいて測定領域データを関連付けるシステムおよび方法を開示する。
【解決手段】検出レポートは、パッシブコヒーレント探索システムにおいて受信したターゲット信号と関係がある。検出レポートの測定値はターゲット信号のデータと関連がある。ライントラック状態推定機能部が、新しい検出レポートをライントラックと関連付け、ライントラックの更新状態を推定する。信号タイプを判定する。この信号タイプに応じて測定値についてカルマンフィルタを選択する。このカルマンフィルタに応じて検出レポートの測定値の誤差を計算する。この誤差に応じてライントラックに関連付ける検出レポートを選択する。ライントラックは、所定基準に従って更新中に合成するか、あるいは終了させることができる。さらに、新しいターゲットが検出されると新しいライントラックを初期化する。
(もっと読む)
追尾割当装置
【課題】複数ターゲットの追尾を複数センサに割当てる場合に、高速に最適割当を実現できる追尾割当装置を得る。
【解決手段】ターゲットDB13と、ターゲット想定軌道束を算出するターゲット想定軌道束算出機能11と、監視要求をターゲットDBに記憶させる監視要求記録機能12とを有するターゲット管理部10と、センサDB24と、割当可能数推移DB25と、既割当スケジュールを記憶する既割当スケジュールDB26と、割当可能数推移を算出する割当可能数推移算出機能21と、センサ毎監視可能期間を算出するセンサ毎監視可能期間算出機能22とを有するセンサ管理部20と、追尾精度貢献度DB32と、追尾精度貢献度を算出する追尾精度貢献度算出機能31とを有する誤差算出部30と、追尾精度貢献度の加算結果から最適割当スケジュールを算出する最適割当算出機能41を有する割当算出部40とを備える。
(もっと読む)
制御盤保守システム
【課題】制御盤に実装される電子基板の実装チェックが作業を迅速かつ簡単に行えるようにする。
【解決手段】電子基板31,32a〜32dに貼り付けたRFID4の認識番号及び位置情報を、制御盤2に設置されたリーダ5から読み取り、リーダ5から読み取られたRFIDの認識番号及び位置情報と、保守ツール1内のデータベース及び実装図の情報を、保守ツールにおいて照合して、実装図で指定された位置に指定された型式の電子基板が制御盤2に実装されているかどうかを判定し、判定結果を保守ツールのモニタに表示するようにした。
(もっと読む)
マイクロ波検出器
【課題】 身近な行動エリア(ローカルエリア)の設定を容易に行なうことができると共に、ユーザの利用状況に応じて更新できるマイクロ波検出器を提供すること
【解決手段】 マイクロ波の受信に伴い警報を発するマイクロ波検出部10と、車両の位置情報を求めるGPS受信部20と、マイクロ波検出部の動作の有無を判定する動作判定部40と、エリアローカルエリア内に車両が存在するときにマイクロ波検出器の動作を制御するローカルエリア内報知制御部30とを備える。制御部30は、動作が開始(電源ON)の時の位置情報の履歴情報を求め、利用度の多い2地点を基準点とし、その2点間の距離に一定の数値を乗算してその値より自車位置と2点との距離の和が少ない場合にローカルエリア内にあると判断する。
(もっと読む)
車載用レーダ装置
【課題】車輌の走行状況に応じてレーダの照射方向を適切に変更可能な車載用レーダ装置を提供する。
【解決手段】車速センサ14からの車速Vから捕捉距離dを算出し、捕捉距離dと車輌の旋回半径Rとからレーダの走査の角度θを計算する。レーダ16において角度θの方向に基いて照射方向を走査する。2輪車の場合、傾斜センサ18からの傾斜角度ψと車速Vとから旋回半径Rを算出する。
(もっと読む)
レーダ観測システムとそのパラメータ最適化方法
【課題】 MTI調整において、最適な信号処理パラメータを迅速に導出可能にする。
【解決手段】 パラメータ自動設定部12とレーダ観測データ蓄積部14を用いて、オンライン状態で短時間に設定パラメータを複数回変更して、それぞれの観測データを時刻管理して蓄積しておき、オフライン状態で、保存した評価用データとパラメータ設定情報を選択的に読み出して複数のパラメータそれぞれの評価を行い、その評価結果を比較することで最適な信号処理パラメータを導出するようにし、MTI調整において、複数回のパラメータ変更とその評価処理を切り分けて処理する。
(もっと読む)
ミリ波レーダによる道路交通監視装置
【課題】ミリ波レーダにより走行車両を計測し車線数、各車線幅、中央分離帯幅などを自動的に判断しながら車両交通量を監視する道路交通監視装置を提供する。
【解決手段】ミリ波レーダ2によりミリ波ビーム7を照射し反射波受信により複数の走行車両の検出を行う。照射角、反射までの時間、ドップラーシフトの関係から、ミリ波レーダ2からの距離、方向角度、速度等を算出し、車両の走行軌跡を求め、走行車両数と車線幅方向の関係をグラフ化してグループ分けを行い、グラフの山から車線数を抽出し、グラフの山と両脇の谷から車線幅を抽出する。走行軌跡の速度成分方向が正から負に切り替わる境界部分の中央分離帯の幅を求める。以上で得られた道路配置に基づき車両交通量の計測と監視を行う。
(もっと読む)
空港用気象レーダ装置とその運用方法
【課題】 航空機の安全を考慮した最適なシーケンスで観測高度を切り替える運用を実現する。
【解決手段】 通信部1において、空港監視レーダから航空機位置情報を取得し、取得した位置情報から着陸機の情報のみを抽出して、着陸時間帯予測部12にて、その航空機位置情報から着陸行動時間帯を予測する。レーダ制御部13では、予測した着陸行動時間帯から着陸態勢に入る直前に低仰角走査モードとなるようにアンテナ走査の最適シーケンスを決定し、この最適シーケンスで気象ドップラーレーダ部14を制御する。観測結果判定部15では、レーダ部14の観測情報を取得して異常気象を判定する。この判定において、ダウンバーストのような危険な異常気象を判別した場合には、着陸態勢に入る航空機に対して警告を発する。
(もっと読む)
レーダ装置の校正装置及び方法
【課題】目標の距離が異なる場合でも正確に周波数特性誤差を補正できるレーダ装置の校正装置及び方法を得る。
【解決手段】アンテナ1、所定帯域内で周波数可変のローカルオシレータ8、ローカルオシレータ8の出力を送信する送信機2、アンテナ1にサーキュレータ4を介して接続される受信機3、受信機3からの信号をダウンコンバートするミキサ5、ミキサ5の出力をフーリエ変換するフーリエ変換手段7、フーリエ変換手段7の出力から周波数を検出する周波数検出手段9、受信機3の周波数特性誤差を予め記憶するメモリ12、メモリ12から周波数特性誤差を読み出し周波数検出手段9の出力に応じて周波数特性誤差をシフトするシフト手段11、シフト手段11の出力に基づき受信機3の出力の周波数特性誤差を補正する補正用乗算器6を備え、ミキサ5は、補正用乗算器6の出力の逆数または複素共役数で受信機3の出力をダウンコンバートする。
(もっと読む)
船舶用障害物警報装置
【目的】
自船舶周囲の障害物に関して、その方向及び危険度を、船員にとって直感的にわかりやすく知らせる警報装置を実現する。その際、船員は船室内を自由に移動することを可能にする。
【構成】
レーダ探知機などを用いて障害物の検知を行い、該障害物の緯度および経度を取得し、さらに自船からみた相対速度を計算する危険位置検出手段101及び、相対角度検知手段102からなる障害物検知手段により障害物を数値化し、これら手段からの出力を元に危険係数算出手段103にて危険係数kを算出し、次に、危険係数kと閾値nの比較を行い、kがnよりも大きければ危険方向通知手段内の音場生成手段を経て4つ以上のスピーカを使った音響出力手段により、立体音を出力するものである。
(もっと読む)
視力測定システム,情報処理装置,遠隔操作装置,情報処理方法,遠隔操作方法およびコンピュータプログラム
【課題】 空間的制約のある場所においても,簡易な方法で視力を測定する。
【解決手段】 遠隔操作装置104を操作するユーザの視力を測定する情報処理装置102に,装置間距離を測定する距離測定部122と;装置間距離,視力測定の視標として表示される視力検査画像の大きさ,および視力測定結果の対応関係を示した視力換算情報記憶部128と;所定の大きさの視力検査画像を表示する画像表示部134と;遠隔操作装置を介して入力された視力検査画像の認識結果と,表示された視力検査画像とを比較する比較部136と;比較部の比較結果に応じて,画像表示部に表示された視力検査画像の大きさを調整する画像調整部138と;距離測定部により測定された装置間距離と,画像表示部に表示された視力検査画像の大きさとに対応する視力測定結果を,視力換算情報記憶部から抽出する視力測定結果抽出部126と;を備える。
(もっと読む)
擬似直交波形レーダシステム、2次多相波形レーダ、およびターゲット位置決定方法
擬似直交波形の実施形態では、レーダシステム100は擬似直交波形を送信し、組合わせられた単一の受信機チャンネル信号で多重の相関を行う。2次多相波形の実施形態では、レーダシステム100は複数の送信アンテナにおける単一の2次多相波形の周波数分離されたバージョンを同時に送信し、各アンテナからの反射信号を組合わせて時間ドメイン信号を生成し、ターゲットの位置を突き止めるために組合された時間ドメイン信号でフーリエ変換を行う。レーダシステムは狙撃者の銃弾、入来する発射体、ロケット推進擲弾(PRG)、または迫撃砲の弾丸のようなターゲットを識別することができる。ある実施形態では、システムはターゲットの弾道を評価し迎撃することができる。実施形態ではシステムはターゲットの弾道を評価し、さらに狙撃者のようなターゲット源の位置を突き止めるためにターゲットの弾道を外挿することができる。 (もっと読む)
車載レーダ装置
【課題】送信信号の電力を増大させることなく、降雨等の悪天候時においても良好に目標物を検出することができる車載レーダ装置を提供する。
【解決手段】自動車に搭載される車載レーダ装置1であって、電磁波を送信波として自動車の周辺の目標物に送信するとともに、目標物からの反射波を受信波として受信するアンテナ4と、送信波および受信波から得られるビート信号に基づいて目標物との距離および相対速度の少なくとも一方を演算する演算回路8と、自動車の付近の降雨状態を判定する降雨状態判定部13と、降雨状態に基づいてビート信号に対する検出感度を設定する増幅利得設定部15およびしきい値設定部16とを備えたものである。
(もっと読む)
移動体の探索システム
【課題】 システム利用時における利用者の負担を軽減すると共に、付帯情報の管理も行うことができる迷子探索システム等を提供する。
【解決手段】 迷子探索システムSは、固有のID情報が付与された無線タグ10、検出ゲート21に取り付けられたリーダライタ20、該リーダライタ20とデータ通信可能に接続されたサーバ装置30、このサーバ装置30から位置情報の配信を受ける情報端末機としての情報提供端末機40及び携帯電話機50を備える。サーバ装置30は、子供等に保持される無線タグ10のID情報と、その保護者に対して割り当てられる一意の管理符号とを関連付けた管理情報を保有し、リーダライタ20の設置位置情報と、各リーダライタ20が検出した無線タグのID情報から子供等の位置情報を生成し、該位置情報を、情報提供端末機40又は携帯電話機50へ配信する。
(もっと読む)
クラブヘッド速度及びテンポを測定するための小型レーダー
【課題】ゴルフスイングの時間(94)を計るためにレーダーを用いる、ゴルフクラブヘッドのスイングを計る装置(10)である。
【解決手段】クラブヘッド速度の測定(88)も具備する。開示された実施形態の詳細には、ゴルフスイングの開始及び終了を検出し、及びレーダー信号の情報から検出できることが含まれる。好ましくは、RFドップラーレーダーが用いられる。様々な形式の使用及びディスプレイが提供される。従って、ゴルフのプレー及び素振りにおけるスイングパラメータの測定について改善した機器に対するニーズがある。
(もっと読む)
レーダ装置
【課題】人の手を煩わすことなく低コストで自動的に電波の回り込みを最小にすることができ、さらに、例えば経年変化によりバンパーの厚みが変わってしまった場合や、材料の異なるバンパーに交換した場合でも、電波の回り込みを最小にすることができるレーダ装置を提供することを目的とする。
【解決手段】アンテナの前方に配置された部材を通してレーダビームを送受信することで、周囲の物体を検知するレーダ装置であって、基準周波数で変調された送信ビームをアンテナから送信する送信部と、送信ビームが物体で反射した受信ビームを受信する受信部と、送信ビームと受信ビームの時間差に基づいて物体までの距離を算出する信号処理部とを備え、信号処理部は、さらに、受信ビームに基づいて部材からの反射損が最小になるように基準周波数を制御することを特徴とする。
(もっと読む)
自律走行車及びその制御方法
【課題】現場に固定された検出対象物を検出することにより基準方位を読み取ってジャイロセンサの基準方位の設定を行う自律走行車において、検出対象物の設置を容易にし、正確な走行制御を行う。
【解決手段】現場に仮想として配置されるXY座標上の点として特定されている2点以上の位置にそれぞれ固定された検出対象物(リフレクタR1〜R4)をレーザ・スキャナ44によって検出して得られた情報に基づき、XY座標上の自車の方向αを算出する。これを走行ルート始点5等において行い、自車の方向αに基づきジャイロセンサの基準方位を設定する。ジャイロセンサの検出信号に基づき走行ルート4に沿った走行を制御し、リフレクタの設置数は極力少数に抑えた。
(もっと読む)
レーダー探知機
【課題】 道路種の手動設定の煩わしさを回避し、車両が走行している実際の道路種をより正確に自動的に判定することができ、警報の誤発信等を防止することなどが可能なレーダー探知機を提供する。
【解決手段】 車両に取り付けられ、速度取締装置が設置されている場所を探知するレーダー探知機1であって、速度取締装置の位置情報を、速度取締装置が設置されている道路種とともに記録した記録部2と、車両の現在位置を検知する現在位置検知部3と、車両が走行している道路種を判定する道路種判定部4と、警告を発する警告部6と、レーダー探知機の動作を制御する制御部5とを備え、制御部5は、現在位置検知部3が検知した車両の現在位置に基づいて、車両が、道路種判定部4が判定した道路種に関連づけて記録部2に記録したいずれかの速度取締装置に近接したと判定した場合には、警告部6から警告を発する。
(もっと読む)
クラッタ抑圧装置
【課題】 目標信号の減衰を招くことなく、クラッタの消え残りを防止する。
【解決手段】 クラッタの中心周波数に零点を形成するフィルタ係数を計算し、そのフィルタ係数を用いてパルスレーダの受信信号に含まれているクラッタを抑圧するクラッタ抑圧部4と、オフセット周波数が付加された中心周波数に零点を形成するフィルタ係数を計算し、そのフィルタ係数を用いてクラッタ抑圧部4の出力信号に含まれているクラッタを抑圧するクラッタ抑圧部7−1〜7−Nとを設け、クラッタ抑圧部4,7−1〜7−Nの出力信号の電力と電力閾値を比較し、その比較結果に応じてクラッタ抑圧部4,7−1〜7−Nの出力信号を選択して出力する。
(もっと読む)
41 - 60 / 76
[ Back to top ]