
Fターム[5J070AK36]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 自動化 (76)
Fターム[5J070AK36]に分類される特許
61 - 76 / 76
レーダの軸ずれ量決定装置
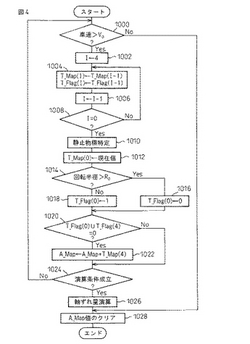
【課題】 静止物標の分布に基づくレーダの水平方向軸ずれ量決定において、直線走行からカーブ走行に移行する際にも正確に軸ずれ量を決定する。
【解決手段】 検出された静止物標の2次元的な分布のデータおよび直線走行かカーブ走行かを示すフラグを現在から所定時間前まで時系列的に保持することによって(ステップ1002〜1018)、所定時間前の分布データおよびフラグをそれぞれT_Map(4)およびT_Flag(4)として保持する。現在および所定時間前のいずれにおいても直線走行していたと判定されるときのみ(ステップ1020)所定時間前の分布データT_Map(4)をA_Mapに積算し(ステップ1022)、積算値A_Mapに基いて軸ずれ量を演算する(ステップ1026)。
(もっと読む)
アンテナ予報値作成プログラム

【課題】 無駄な逆回転が生じることのない追尾装置用のアンテナ予報値をコンピュータに作成させるアンテナ予報値作成プログラムを提供することを目的とする。
【解決手段】 正回転又は負回転により方位角を制御可能な追尾装置20用のアンテナ予報値を作成するコンピュータ10に、供給されたアンテナ予報値の示す方位角存在範囲が追尾装置20の駆動制限にかかるか否かを判定する判定ステップと、アンテナ予報値の示す方位角存在範囲のうち、駆動制限にかかる方位角存在範囲を逆回転の方位角に変換する変換ステップとを実行させることにより上記課題を解決する。
(もっと読む)
目標特定評価装置
【課題】目標のRCSの距離、向きによる変化から、特定結果を判定し、電波データなどでは絞り込めなかった、複数の目標の特定結果を絞り込み、確度の高い特定結果を可能とする目標特定評価装置を得る。
【解決手段】任意のシナリオに基づき複数の疑似的な目標を発生する疑似目標発生部25と、電波探知装置等の覆域を算出する覆域評価部26と、探知した目標の電波目標データ等を作成する目標探知模擬部100と、距離−RCSデータ等と目標特定結果の対応関係を格納するデータベースを作成するデータベース作成部33と、電波目標データ等をデータベースと比較・照合することにより目標を特定する目標特定部39と、特定結果を更新する特定結果評価部40と、特定結果を表示する結果表示部42と、特定結果を統計的に処理する特定結果処理部38と、特定結果の処理結果に基づきデータベースを更新するデータベース更新部43を設けた。
(もっと読む)
監視装置
【課題】 遠方に存在する船舶や障害などの物体を速やかに自動検知し、かつ、検知した物体の画像を表示すること。
【解決手段】 レーダ1により、物体の存在が検知された場合には、送光部21から発せられるレーザ光がその物体に照射されるように、送光部21及び受光部22の仰角及び回転角が制御装置3により動かされる。これにより、送光部21から発せられたレーザ光は、物体に反射され、この反射光が受光部22により撮像される。そして、受光部22により取得された画像が、レーザレーダ制御部24の画像処理装置により処理され、処理後の画像信号が制御装置3を介して表示装置4に供給される。これにより、表示装置4に受光部22により取得された画像が表示されることにより、その物体の形状などを確認することが可能となる。
(もっと読む)
未知の障害物の中の予測不可能な目標物の実時間追跡
本発明の実施例は、環境内の障害物の配置についての事前の知識を必要とせず、ロボットが追跡する目標物の軌跡も知らずに、障害物のある環境内で動作する移動ロボットの運動を計算するための計画を提供する。本発明の実施例は、目標物の位置と環境内の障害物の位置の測定結果に基づいて、監視ロボットの運動を支配するアルゴリズムを提供する。アルゴリズムは目標物と障害物によって作られた監視者の視野領域との間の幾何学的配置を計算によって記述し、この記述を用いて連続的な制御則を計算する。本発明の実施例は、逃走経路ツリーデータ構造を使用して目標物の監視ロボット検出器からの逃走について起こり得るモードを分類し、逃走経路ツリーを用いて目標物の最短逃走経路を決定する。  (もっと読む)
(もっと読む)
構造物内部の異常箇所候補抽出方法およびプログラム
【課題】 構造物内部のレーダ計測データにより、コンピュータによる透過映像を得るまでの計算時間の削減と、オペレータによる透過映像を診断する労力の軽減、そして計測から診断結果出力までの時間短縮を目的とする。
【解決手段】 地中レーダを用いて構造物内部検査を行い、前記地中レーダの反射信号から内部構造の画像再生を行うに際し、反射強度分布から閾値により正常箇所を除去することにより異常箇所候補領域を抽出し、当該異常箇所候補領域とそこに含まれる反射強度より、異常の度合いを示す評価値を得て、異常箇所候補領域の位置を評価値で順位付けして、像再生処理に必要な計測データの切り出し場所を特定し、特定領域についての像再生処理を行う。
(もっと読む)
物品位置検出装置および物品位置検出方法ならびにそのプログラム
【課題】 従来に比べてより精度良く1つの装置に備えられたアンテナにより物品の位置を特定することのできる、物品位置検出装置を提供する。
【解決手段】 物品位置検出装置1の移動に伴って、物品タグからの無線信号を受信し、その無線信号に含まれる情報をデータベースなどに記録していく。また同時に、物品位置検出装置1の座標と、その座標を通過した時刻をデータベースなどに記録していく。また、重み付けの補正を行う場合には、重み付けの特定の処理を行って、重み付け値を算出する。そして、同一の物品タグから受け付けた1つまたは複数の無線信号の数と、それら無線信号の受信の各時刻における物品位置検出装置1の各座標と、移動に伴って順次受け付ける物品位置検出装置1の各座標およびそれら座標を受け付けた時刻とに基づいて、物品タグ1の座標を算出する。
(もっと読む)
車載用レーダ装置
【課題】 車体とバンパーとの間等の奥行き長さが短い空間に搭載することが可能で、搭載される車両の走行状態などに応じてビーム方向の切替えやスキャンを行うことができるレーダ装置を提供する。
【解決手段】 レーダモジュール1aは、放射するレーダビームによって車両周辺の障害物を検知し、放射されるレーダビームが誘電体レンズ部2aの境界面に応じて屈折する。移動機構3aは、車両の走行状態に応じて制御部4aによって動作制御され、レーダモジュール1aを放射する出射方向に対して垂直に移動させて、誘電体レンズ部2aが有する凹面の異なる位置等にレーダモジュール1aから放射されるレーダビームを入射させる。これによって、ビームスキャン方向および範囲やビーム放射方向を変化させることができる。
(もっと読む)
撮影装置
【課題】ICタグを装着した撮影対象を撮影する撮影装置および撮影方法に関し、撮影対象物にICタグを装着することで、対象物を検出およびその距離を測定して焦点合わせし、簡単かつ正確に焦点の合った状態で対象物を自動撮影する。
【解決手段】撮影対象に装着されたICタグまでの距離を測定する手段と、測定した距離をもとに撮影機器の焦点合わせを行った後、前記撮影対象を撮影する。
(もっと読む)
レーダ装置
【課題】 自身が動作中に電磁波を送出していることを自己診断可能なレーダ装置を提供すること。
【解決手段】 レーダ装置は、第1の周波数を有する第1の変調信号と、当該第1の変調信号よりも所定時間だけ遅延が与えられかつ当該第1の周波数帯とは異なる第2の周波数を有する第2の変調信号とを含む合波信号を外部に送出する送信用アンテナ11と、送信用アンテナ11の近傍に設置され、送信用アンテナ11から送出された合波信号が通過するレドーム12とを備える。ここで、レドーム12の厚みdは第1の周波数に基づいて選ばれ、レドーム12は、合波信号に含まれる第1の変調信号の成分を反射し、第2の変調信号の成分を透過する。レーダ装置はさらに、第1の変調信号成分に基づいて、送信用アンテナ11から高周波信号が送出されているか否かを判断する信号処理系1とを備える。
(もっと読む)
測距センサ及びその設定方法
【課題】適切な閾値を自動で決定することのできる測距センサを提供する。
【解決手段】測距センサの設定方法は、センサヘッド部の測距媒体照射位置に対象物を配置した状態で、測距媒体を照射してセンサヘッド部の照射面から対象物までの距離を演算し、演算された距離に基づいて、対象物の配置位置とセンサヘッド部との間に閾値を自動的に設定する。これにより、ユーザは手動で閾値を演算して設定することなく、実際に対象物をセットして測距媒体を照射することにより最適な閾値を自動的に演算して設定でき、かつ設定された閾値によって対象物が無い場合は測定距離が閾値を上回って出力OFFとなり、対象物が検出された場合は測定距離が閾値を下回って出力OFFとなる、センサの一般的な出力パターンと一致させることができ、極めて使い勝手の良い測距センサが実現される。
(もっと読む)
レーダ装置
【課題】小型の恒温装置または簡単な冷却装置を備えた送信機を用いてクラッタ抑圧度を改善できるレーダ装置を提供する。
【解決手段】送信機1と、発生された送信信号を送信波として指定方向の空間に送信し且つ該送信波の反射波を受信するアンテナ3と、アンテナで受信された反射波をデジタルビデオ信号に変換する受信機4と、送信機で発生される送信信号の送信パルス幅と送信間隔とに基づいて該送信機の温度を算出する温度算出装置9と、算出された送信機の温度に基づき受信信号の振幅および位相の補正値を算出する補正値算出装置10と、算出された補正値に基づいて、受信機からのデジタルビデオ信号に含まれるパルス内の振幅および位相を補正する振幅・位相補正装置11と、振幅・位相補正装置からの信号に含まれるクラッタを抑圧するMTI装置5を備える。
(もっと読む)
レーダ装置の軸ずれ検知方法および検知装置
【課題】 車両単体でレーダ装置の軸ずれ検知を行うことができるようにする。
【解決手段】 車両のレーダ装置取り付け位置前方であってレーダ装置100の検知方向とは異なる方向にある車体の一部に微小反射材を配置し、検知方向にアンテナの指向方向を一致させてレーダ装置100を車体101に取り付け、このようにして取り付けられたレーダ装置100を用いて微小反射材に関する基準データを取得し、車両の使用時にレーダ装置100によって微小反射材に関する使用時データを取得し、基準データと使用時データとを比較して比較結果が予め設定された一定値を超える場合レーダ装置100の軸ずれと判断する。
(もっと読む)
位置検出機能付マイクロ波検出器
【課題】 誤動作源の自動登録を可能とするとともに、誤動作源の登録に対して多量のデータを記憶することがない位置検出機能付マイクロ波検出器を提供すること
【解決手段】 所定のマイクロ波の受信を判定するマイクロ波検出器本体10と、そのマイクロ波検出器本体が所定のマイクロ波を検出したときに警報を発するマイクロ波検出警報部31と、車両の位置を検出する位置検出器20と、マイクロ波検出器本体が所定のマイクロ波を受信したと判定した時に、位置検出器の出力する位置情報を誤動作源位置情報として記憶する誤動作源位置記憶部34と、位置検出器の出力と誤動作源位置記憶部の出力を基にマイクロ波検出警報手段を制御する警報制御部35を備える。警報制御部は誤動作源位置記憶部が位置検出器の出力する位置情報を記憶したときから所定の条件を満たした以降において、位置情報が前記誤動作源位置記憶部に記憶されている位置情報のいずれかの所定距離内にある場合にマイクロ波検出警報部の正規の警報動作を抑制するように制御する。
(もっと読む)
電波式液面計の校正装置
【課題】校正に必要な基準を十分長く取ることができて高精度で信頼性の高い校正が可能であり、校正に必要な基準を設けるために構築物を設置する必要がなく、スペースが制限されず、低コストの電波式液面計の校正装置を得る。
【解決手段】送信回路と、アンテナと、受信回路と、電波を送信した時点から受信する時点までの時間差を測定する時間差測定手段と、を有し、時間差に基づいて液面までの距離を測定する。液面までの距離測定に必要な電波の照射範囲外であってアンテナから送り出される電波の一部を受信することができる結合手段18と、結合手段と一体につながれ既知の基準長さを有する基準ケーブル16と、電波を送信した時点から結合手段18と基準ケーブル16を通じて電波を受信するまでの時間に基づいて求められる基準長さ実測値と基準長さに基づいて校正値を求め、液面までの距離の実測値を校正値によって校正する校正手段と、を有する。
(もっと読む)
レーダシステムおよびレーダ信号処理装置
【課題】取得した画像データから水面の状態に関するデータを得るための処理を自動化し、これにより省力化および処理の高速化を図る。
【解決手段】アンテナ1、送受信部2、信号処理部3よりなるSARによりSAR画像データを取得する。また記憶部5に、水面の波がとり得る状態のイメージデータに波の向きを示すベクトル(矢印)およびその波長を対応付けたテンプレートデータベース5aを記憶しておく。そして、相関処理部4により、SAR画像データを複数の区域に分割してそれぞれテンプレートとの相関を取り、相関値の最も高いテンプレートに対応付けられた波の向きと波長とを記憶部5から読み出す。またこの読み出したデータをもとに、演算部6で最適進入コースを算出するようにした。
(もっと読む)
61 - 76 / 76
[ Back to top ]