
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
21 - 40 / 647
レーダ装置及び受信データ処理方法
【課題】現スキャンで得られたデータに、過去のスキャン結果に基づいて推定したデータを正確に積分することが可能なレーダ装置及びこのレーダ装置で用いられる受信データ処理方法を提供する。
【解決手段】レーダ装置は、無線部、パルス圧縮部、ドップラフィルタ処理部、信号処理部、予測部、加算部及び抽出部を具備する。パルス圧縮部は、無線部で受信したパルス信号にパルス圧縮処理を施す。ドップラフィルタ処理部は、パルス圧縮後のデータにドップラフィルタ処理を施すことで、周波数ビン毎のレンジセルデータを生成する。信号処理部は、レンジセルデータを固有データに変換する。予測部は、前回のスキャン結果に基づき所定の範囲に目標が位置すると予測する予測データを作成する。加算部は、予測データと、次スキャン時に取得される固有データとを、同一の位置同士で足し合わせる。抽出部は、足し合わせたデータのうち、強度が最大の位置のデータを抽出する。
(もっと読む)
パッシブレーダ装置

【課題】送信レーダの送信諸元が未知であっても、目標のレンジおよびドップラ周波数の情報を取得することのできるパッシブレーダ装置を得る。
【解決手段】送信レーダ1からの直接波は、直接波受信系である直接波アンテナ3〜A/D変換部5を介して信号処理部101に入力される。目標からの目標反射波は、目標反射波受信系である目標反射波アンテナ3A〜A/D変換部5Aを介して信号処理部101に入力される。信号処理部101では、直接波受信系により観測した直接波観測データから送信レーダの送信信号の未知諸元を推定し、この推定結果と、直接波観測データと目標反射波受信系により観測した目標反射波観測データとに基づいて、目標のレンジおよびドップラ周波数の情報を推定する。
(もっと読む)
ターゲット識別システム
【課題】簡易な構成でありながら正確にターゲットである例えば人の移動軌跡を追跡するなどのターゲット識別をすることができるターゲット識別システムを提供すること。
【解決手段】送信アンテナTAの各素子アンテナから、互いに直交する信号を送信し、ターゲットで反射して帰ってくる信号を受信アンテナRAで受信して、整合フィルタによって、互いに直交する信号を分離することによって空間バーチャルアレーSVAを構成し、異なる時間に得られる信号について、ターゲットの移動に伴う位相ズレを補償することによって仮想的に位置がズレている素子アンテナの信号として得ることによって時間バーチャルアレーTVAを構成する。これによって、実質的に素子アンテナの数を増やし、開口長を拡大することができる。
(もっと読む)
レーダ装置
【課題】少ない演算量で、目標の3次元速度ベクトルを推定することができるレーダ装置を得ることを目的とする。
【解決手段】目標信号検出手段により検出された目標信号のうち、送受信局00及び受信局01,02,10,11の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出する。
(もっと読む)
絶対速度推定装置
【課題】速度出力のためのデータを所得した時間にずれが存在しても、検出対象物の絶対速度を正確に推定することができる絶対速度推定装置を提供する。
【解決手段】取得したデータから対象物Tの相対速度Ttを出力する相対速度出力手段104と、センサ13〜15から出力されるデータから自車両1の絶対速度Vmを出力する自車速度出力手段105と、手段104,105が同期して出力した相対速度Vt及び自車速度Vmを求めるためにそれぞれ利用したデータを取得した時間の推定ずれ量Dを取得するずれ量取得手段106と、推定ずれ量Dだけ時間をずらせて相対速度Vsに自車速度Vmを加算して求めた対象物Tの推定絶対速度Vを出力する絶対速度推定手段107とを備える。ずれ量取得手段106は、複数の対象物Tiのうち、各対象物Tiの相対速度Vtiと自車速度Vmとの差が0となる対象物Tiの数が最大となるずれ量dを、推定ずれ量Dとして取得する。
(もっと読む)
レーダ装置及び干渉波除去方法
【課題】干渉波による影響を除去してパルス圧縮時のサイドローブを低減する。
【解決手段】IQ検波部171は、受信信号を直交検波してIQデータを求める。干渉波除去部172は、IQデータから干渉波の影響を除去する。干渉波除去処理では、同一ヒットでの対象レンジ目の電力値を周囲のレンジ目の電力値に基づいて補正し、同一ヒット間で位相変化が保たれるようにデータ補正が行なわれる。パルス圧縮部173は、位相変調または周波数変調が施された送信パルスの受信信号において、その復調を施す際に変調送信波との自己相関をとることによって送信パルスより幅の短いパルスに変換する処理を行う。このとき、干渉波除去処理において位相状態が保持されているので、パルス圧縮後の出力にサイドローブが発生することを抑制することができる。
(もっと読む)
遠隔ガス流速計測方法及び遠隔ガス流速計測装置
【課題】ダストが多い悪環境においても、ダストによる波動の減衰の影響を受け難く遠隔の所定位置のガス流速を、比較的簡単な機器構成で高精度に計測できるようにする。
【解決手段】いわゆるマイクロ波或いはミリ波と呼ばれる電磁波を波動として用いており、その波長はmm〜cmオーダであるため、通常の直径が約0.1〜1mm程度のダスト粒子が多い雰囲気では、若干の散乱波が生ずると同時にそれらの電磁波の透過性が確保されるので、送信アンテナ23及び受信アンテナ24から比較的離れた遠隔の場所でもガス流速の計測が可能となり、さらに、電磁波を擬似ノイズで変調した電磁波を送信し、受信された散乱波を擬似ノイズで相関処理を施して検出するため、微弱な散乱波を高感度或いは高ノイズ抑制性能をもって検出できるので、送信アンテナ23及び受信アンテナ24から遠隔な場所の微弱な散乱波を検出し、ガス流速の計測が可能となるようにした。
(もっと読む)
後側方障害物検知装置
【課題】自車両がガードレール等の非報知対象物と近い位置にある場合であっても、報知対象物である他車両等が非報知対象物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物として検知する検知角度の範囲である非報知対象物検知範囲の大きさを制御する非報知対象物検知範囲制御部と、自車両から非報知対象物までの距離を算出する距離算出部とを備え、非報知対象物検知範囲制御部は、距離算出部によって算出された自車両から非報知対象物までの距離に応じて、非報知対象物検知範囲の大きさを制御する。
(もっと読む)
物体検出装置
【課題】移動体に搭載した場合に、受信信号のSN比の向上を実現しながらも、検出対象とする物体の相対速度の範囲を当該移動体の速度に応じて変更することを可能にする物体検出装置を提供する。
【解決手段】移動体に搭載され、複数のパルスからなる複数のパルス列で構成される送信信号を発生するパルス発生器1と、パルス発生器1の発生する送信信号について、所定の符号系列に従って送信信号のパルス列毎にデジタル変調を施した変調信号を出力する信号変換器2と、信号変換器2の出力する変調信号を送信波として送波するとともに、その送信波の反射波を受波するマイク6と、マイク6で受波した反射波から得られる受信信号と前記変調信号との符号の相関値を求め、その結果により反射波から得られる受信信号をパルス圧縮するパルス圧縮手段とを備え、移動体の速度に応じて、信号変換器2において用いる符号系列の長さを変更する。
(もっと読む)
擬似信号発生回路
【課題】 PLDの制御回路およびDDSを用いた小規模なハードウェア構成で実現できる擬似信号発生回路において、擬似目標からのレーダ連続パルス受信信号を模擬する際に、目標が移動することで観測される周期的なパルス間位相推移に不連続点が発生する。
【解決手段】 制御回路内で擬似移動目標のパルス間位相推移量を積算するアキュムレータについて、ドップラ周波数成分のみで積算するのではなく、ドップラ周波数成分と送信局部発振波の中心周波数成分を合わせて積算することで、パルス立ち上がり時間が切替わる際でも位相誤差が発生しないようにした。
(もっと読む)
レーダ装置
【課題】各送信側系統間の動作を同期させるための回路構成を追加せずに、簡易な構成により複数のレーダ信号を分離する。
【解決手段】第1レーダ送信部は、所定の符号長の符号系列を、第1符号幅を用いて所定数繰り返した第1変調信号を送信する。第2レーダ送信部は、同じ符号系列を、第2符号幅を用いて所定数繰り返した第2変調信号を送信する。レーダ受信部は、第1符号幅と第2符号幅の差分値よりも小さいサンプリング周期で離散信号に変換するA/D変換部と、A/D変換部からの出力信号を、第1符号幅に応じた所定のサンプル数分遅延させる第1遅延部と、第2符号幅に応じた所定のサンプル数分遅延させる第2遅延部と、A/D変換部と第1遅延部とからの各出力信号とを基に第1相関値を算出する第1相関値算出部と、A/D変換部と第2遅延部とからのからの出力信号とを基に第2相関値を算出する第2相関値算出部とを用いて複数の受信信号を分離する。
(もっと読む)
レーダ装置及び受信データ処理方法
【課題】 過去のスキャンで発生した雑音信号の影響を抑え、目標の位置を正確に検出することが可能なレーダ装置及び受信データ処理方法を提供する。
【解決手段】 レーダ装置は、無線部、パルス圧縮部、ドップラフィルタ処理部、信号処理部、予測部及び積分部を具備する。パルス圧縮部は、無線部で受信したパルス信号に対してパルス圧縮処理を施す。ドップラフィルタ処理部は、パルス圧縮後のデータに対してドップラフィルタ処理を施す。信号処理部は、ドップラフィルタ処理部で1スキャン毎に取得されるデータを固有データに変換する。予測部は、過去のスキャンで取得された固有データに基づいて次スキャン時の目標の位置を予測し、予測した位置に過去の固有データを累積した予測データを作成する。積分部は、次スキャン時に取得される固有データと、累積される積分数が予め設定された回数に抑えられた予測データとを積分する。
(もっと読む)
フーリエ変換でのサンプル数を削減した、短時間信号のピークパワースペクトルを検出する方法及び装置
【課題】測定対象とする時間範囲の分解能を高めつつ周波数分解能を高め、しかもフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、演算量を減らす。
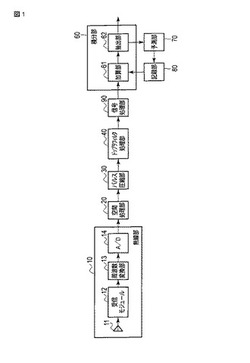
【解決手段】受信信号を変調器5によって周波数変換し、アナログフィルタ7を介して周波数変換後の信号をA/D変換器61によりオーバーサンプリングでデジタル信号に変換し、デジタルBPF62により所望の周波数帯域幅Δfpに相当する成分を抽出し、抽出された信号をダウンサンプリング部63により最低周波数帯域にダウンサンプリングする。その後、信号切り出しゲート11により、ダウンサンプリング部63からのデジタルデータ列を所望の時間幅内で切り出し、周波数分解能を満たすようにゼロ付加部12によってゼロデータを付加し、ゼロデータが付加されたデジタルデータ列に対しFFT処理部13によって高速フーリエ変換を行う。
(もっと読む)
周波数検出方法及び装置
【課題】所望の周波数分解能力を維持しながらフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、複素乗算回数を減らす。
【解決手段】周波数fcを含む所定の周波数帯域幅Δfp内で受信信号の周波数解析を行う装置は、受信信号の周波数変換を行う変調器3と、変調器3の出力に接続したアナログフィルタ4と、アナログフィルタ4の出力をオーバーサンプリングでデジタル信号に変換するA/D変換器6と、A/D変換器6の出力から周波数帯域幅Δfpに相当する成分を抽出するデジタルBPF(バンドパスフィルタ)7と、周波数ゼロからΔfpに相当する帯域幅内に配置されるように、デジタルBPF7から出力される信号をダウンサンプリングするダウンサンプリング部8と、ダウンサンプリング部8の出力に対して高速フーリエ変換を行うFFT処理部9とを備える。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な前記物体単位データを抽出する。そして、自車と先行車との間における自車の走行路上および先行車と先々行車との間における先行車の走行路上のいずれかに停止物体が存在する場合、抽出した物体単位データの中から前記走行路上の停止物体に該当するデータを削除する。この後、左角度方向から右角度方向及び右角度方向から左角度方向の両方向についてそれぞれ、接続条件として距離が単調増加であるデータ同士をグルーピングして路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。
(もっと読む)
画像レーダ装置
【課題】目標とレーダの間の相対運動が未知である等の場合でも、回転運動によって発生する画像のぼけを精度よく補償することができるとともに、クロスレンジスケーリングを実施できるようにする。
【解決手段】レンジヒストリ取得回路1により取得されたレンジヒストリで、不要な並進運動によって発生するレーダと目標間の不要な距離変化を補償する並進運動補償回路2や、並進運動補償回路2により距離変化が補償されたレンジヒストリで、目標における高周波信号の各反射点で、回転運動によって発生するレンジ方向のぼけを補償する回転レンジセル移動補償回路3などを設ける。
(もっと読む)
レーダ装置
【課題】目標の検出性能と測距性能を高めることができるレーダ装置を得ることを目的とする。
【解決手段】距離−ビート周波数マップに対してCFAR処理を実施することで目標候補を検出する目標候補検出処理部13と、目標候補検出処理部13により検出された異なる時刻の目標候補のPRI内の距離とビート周波数から目標相対速度を算出する目標相対速度算出処理部14とを設け、目標相対距離算出処理部15が、目標候補検出処理部13により検出された目標候補のPRI内の距離及びビート周波数と目標相対速度算出処理部14により算出された目標相対速度から目標相対距離を算出する。
(もっと読む)
移動体の速度計測装置
【課題】移動体の移動速度を検出できる範囲を大きく確保でき、かつ、打撃前後の移動体の移動速度、移動体を打撃する物体の速度を同時に計測する。
【解決手段】ドップラーセンサ14を用いて打撃領域の前方から打撃領域に向かって移動するボール2と、打撃領域でボール2を打撃するバット4と、打撃されたあとのボール2とに向けて送信波W1を送信し、バット4とボール2とで反射された反射波W2を受信してドップラー信号Sdを検出する。ドップラー信号Sdから変換された中間データは蓄積部30に時間経過に従って順番に予め定められた蓄積期間分蓄積される。計測部18は、蓄積部30に蓄積された中間データに基づいて打撃時点を特定し、ボール2がアンテナ12に接近する方向に移動する接近速度、ボール2がアンテナ12から離間する方向に移動する離間速度、バット4の速度である物体速度を算出する。
(もっと読む)
動き検出装置、及び動き検出装置を備えたエレベータ
【課題】検知モードの切り換えを必要とすることなく、複数の動きの状態を選択して検出することができる動き検出装置を提供する。
【解決手段】動き検出装置2は、対象物に電磁波信号を放射してドップラー信号を取得するドップラー信号検出回路13と、ドップラー信号を増幅する対数増幅器14,15と、ドップラー信号を所定のサンプリング周波数でサンプリングしてAD変換するAD変換回路16と、ドップラー信号に対してFFT処理を実行するFFT処理回路17と、ドップラー信号から対象物の動きを検出する動き検出回路20とを備える。動き検出回路20は、ドップラー信号の振幅又は電力及び位相を計算し、対象物の動きの状態を選択することと、選択された動きの状態に応じてサンプリング周波数を選択的にAD変換回路16に設定することとを繰り返し、複数の動きの状態に応じた異なる周波数成分を含むドップラー信号を取得する。
(もっと読む)
レーダ装置
【課題】レーダ装置において、ターゲットからの反射波に含まれるドップラスペクトルの広がりに拘わらず、簡易な構成を用いてコヒーレント積分利得あるいはノンコヒーレント利得を高める。
【解決手段】レーダ送信部は、送信信号を高周波送信信号に変換して送信アンテナから送信する。レーダ受信部は、複数の受信アンテナを用いて、ターゲットにより反射された反射波の到来方向を推定する。レーダ受信部は、受信信号と送信信号との相関値を基に、複数のドップラ周波数に応じた位相変動の補正量を用いてコヒーレント積分する複数のアンテナ系統処理部と、複数のコヒーレント積分の各出力を基に、各受信アンテナの配置に起因する位相差情報である相関行列を、ドップラ周波数毎に生成する複数の相関行列生成部と、複数の相関行列生成部の出力を加算する加算部と、加算部の出力を基に、反射波の到来方向を推定する到来方向推定部と、を有する。
(もっと読む)
21 - 40 / 647
[ Back to top ]