
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
101 - 120 / 647
レーダ受信信号処理装置とその方法
【課題】 同程度の周波数変化を持つ目標信号と不要信号が混在するレーダ受信信号から、目標信号のみを的確に検出する。
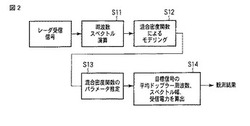
【解決手段】 レーダ受信信号を周波数領域に変換することで周波数スペクトルを取得し(ステップS11)、取得された周波数スペクトルをエコー群それぞれの密度関数の和(混合密度関数)でモデリングし(ステップS12)、混合密度関数のパラメータの最適値を学習することにより推定し(ステップS13)、推定したパラメータから目標信号の平均ドップラー周波数、スペクトル幅及び受信電力を算出し、観測結果として出力する(ステップS14)。
(もっと読む)
レーダ受信信号処理装置とその方法

【課題】 同程度の周波数変化を持つ目標信号と不要信号が混在するレーダ受信信号から、目標信号のみを的確に検出する。
【解決手段】 レーダ受信信号を周波数領域に変換することで周波数スペクトルを取得し(ステップS11)、取得された周波数スペクトルをエコー群それぞれの密度関数の和(混合密度関数)でモデリングし(ステップS12)、混合密度関数のパラメータの最適値を学習することにより推定し(ステップS13)、推定したパラメータから目標信号の平均ドップラー周波数、スペクトル幅及び受信電力を算出し、観測結果として出力する(ステップS14)。上記モデリングに際して、エコー群の周波数スペクトルを混合密度関数に当て嵌め、その当て嵌まり具合をペナルティ付きの尤度関数でもって評価するものとし、前記尤度関数のペナルティ項には、事前に測定した単独エコーの受信電力、ドップラー周波数、スペクトル幅の少なくともいずれかを用いる。
(もっと読む)
レーダ装置
【課題】
レーダ装置に割り当てられている周波数帯域が、他の通信システムで利用される受信装置におけるイメージ周波数に該当する場合であっても、与える干渉を低減する。
【解決手段】
レーダ装置は、予め定められた周期で複数の搬送波周波数それぞれのパルス信号を順に送信する送信部と、前記送信部から送信されたパルス信号が検出対象となる目標物により反射された反射信号を受信する受信部と、前記受信部により受信された前記反射信号を前記複数の搬送波周波数それぞれに対応する信号に分割する周波数分割部と、前記周波数分割部により分割された反射信号からなる時系列の信号を前記複数の搬送波周波数ごとに合成し、更に、位相合成された前記複数の搬送波周波数の信号を合成する信号合成部とを具備する。
(もっと読む)
車両感知器
【課題】安価な構成で、道路を通過する車両の種々の情報を取得することができる。
【解決手段】道路を通過する車両の高さを検出するための車両感知器であって、道路に向かって無線信号を送信し、送信した無線信号が反射した無線信号を受信するための送受信部51と、送受信部51によって受信された無線信号に基づいて、無線信号が反射した位置と送受信部との間の距離を測定するための距離測定部52と、距離測定部52の測定結果に基づいて、道路を通過する車両の高さを算出するための車高算出部52とを備える。
(もっと読む)
支持具および装置の支持構造並びにそれに用いられる部品
【課題】測定する場所と測定対象に応じて、装置を適切な姿勢・位置で支持すること
【解決手段】 速度測定装置1に取り付けられるベース部材21の下面に、ボールジョイントを構成するボール部22cを設けるとともに、ボール部の先端に、三脚ネジ用雌ネジ部22hを設ける。これにより、ボールジョイントを構成する所望のブラケット台に取り付ける構成と、三脚に取り付ける構成の2つの態様が、1つの支持具で兼用して実現できるので、便利であるとともに、取り付ける相手(ブラケット台/三脚)を適宜変えることで、速度測定装置を適切な高さと向きで支持することができる。
(もっと読む)
レーダ装置
【課題】受信信号の組合せの問題を解き複数目標それぞれについて高精度な測位、測速処理を実現するレーダ装置を提供する。
【解決手段】電波の放射を行う送信部100と、異なる観測点に位置し前記送信部の放射電波の複数の目標での反射電波をそれぞれ受信し、各目標に関する受信時刻とドップラ周波数を観測するための時刻・ドップラ周波数用センサTDSおよび各目標の方位を観測するための測角センサASをそれぞれ有する複数の受信部200,300と、前記各受信部で観測された受信時刻、ドップラ周波数および測角値から目標の位置ベクトルおよび速度ベクトルを推定して前記複数目標の位置と速度を求める第1の手段を含む測位・測速演算部Cと、を備えた。
(もっと読む)
速度が曖昧な物標の非コヒーレント積分のための技法
【課題】パルスドップラーレーダ信号を処理して物標を検出するための方法を提供する。
【解決手段】周波数ダイバーシティを有する信号を含む所定の周波数技術に従って、レーダシステムからレーダ信号を送信し、1つの周波数帯域内で、物標の速度を指示する周波数を有する物標エコー信号を含む信号を受信し、可変周波数スケールを有するフーリエ変換を用いて物標エコー信号を変換することを含む。
(もっと読む)
レーダ装置
【課題】S/N比を改善し測距精度の向上を図った多周波パルス方式のレーダ装置を提供する。
【解決手段】電力の小さい近距離用パルスと電力の大きい遠距離用パルスを送信周波数を変えながら交互に送信し、目標で反射した近距離用パルスと遠距離用パルスをそれぞれ異なる周波数の帯域制限を与えて通過させた後出力する送受信系1〜6と、前記送受信系の出力から前記目標までの距離を測距する測距系7〜11と、を備えたレーダ装置。送受信系が、近距離用パルスと遠距離用パルスを生成して送信させると共に遠距離用パルスと近距離用パルスを切り換えるときに送信周波数をステップさせる合成帯域型の送信機1を含む。
(もっと読む)
レーダ信号処理装置
【課題】アジマス分解能の低下を最低限に抑え、かつ偽像の少ない画像を得るレーダ信号処理装置を提供する。
【解決手段】レーダ装置の受信信号を入力し、ドップラー周波数帯域の異なる合成開口処理を施した複数のレーダ画像を生成する第1の手段(図1、2 001a〜b、002a〜b、図4 001、002、)と、それぞれのレーダ画像の分解能が同じになるようにアジマス方向の空間平均処理を施す第2の手段(図1、2 003a〜b、004、005、図4 003、005a〜b、009、008)と、空間平均処理を施したレーダ画像の差異を求めて抽出する第3の手段(図1、2 006、図4 006、010、011)と、を備えた。
(もっと読む)
拡張現実のためのブロードバンドパッシブ追跡
それぞれが周囲の放送ソースからの電磁波(たとえば、無線周波数「RF」信号)を感知する能力を有するいくつかのパッシブ受信機を使用することができるブロードバンドパッシブセンシングおよび追跡システムに関する技術が、全般的に説明される。各パッシブ受信機は、1つまたは複数のアンテナによって感知するように構成され得る。異なる位置の複数の受信機が、関心のあるシーンの協調した追跡を行うように構成されたブロードバンドセンシングネットワークを形成するために利用され得る。一部の例によれば、ビームフォーミングアルゴリズムが、物体を測位および追跡するためにパッシブ受信機によって形成されたアンテナアレーを利用するブロードバンドセンシングネットワークに適用され得る。 (もっと読む)
画像レーダ装置
【課題】位相補償精度を向上させて、再生画像の分解能を向上させた画像レーダ装置を得る。
【解決手段】レーダ観測器は、レンジプロフィールの取得処理を、目標との相対位置関係を変えながら繰り返し実行してレンジヒストリを取得する。レーダ画像化器は、レンジ補償器12と、レンジ補償器12によるレンジ補償後のレンジヒストリS1(r,h)上の代表的な複数の反射点の位相変化を調べ、レーダ画像のドップラー周波数方向のぼけの原因となるヒットに対する2次以上の不要位相変化の、最終的にクロスレンジ圧縮に用いるヒット幅の範囲での値を推定する不要位相変化推定器21と、不要位相変化推定器21で得られた不要位相変化φ2(h)に基づき、レンジ補償後のレンジヒストリS1(r,h)から、最終的にクロスレンジ圧縮に用いるヒット幅分だけ切出したレンジヒストリに含まれる不要位相変化成分を補償する位相補償回路22と、を備える。
(もっと読む)
レーダ装置、目標類別装置及び目標類別プログラム
【課題】ISAR画像における目標の一部が欠落している場合等において、目標の構造物間の絶対長を測定しなくても良好な類別結果を取得することが可能なレーダ装置、目標類別装置及び目標類別プログラムを提供する。
【解決手段】特徴点設定部531は、二つの指定特徴点間の基準距離に基づき、取得したISAR画像から基準相対位置情報を生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数の相対位置情報サンプルを生成する。そして、類似度判定部533により、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を算出し、算出した類似度に基づいた目標形状情報を選択する。
(もっと読む)
角速度推定装置及びコンピュータプログラム及び角速度推定方法
【課題】移動体の角速度を精度よく推定する。
【解決手段】周辺物体観測装置811(レーダ)は、移動体の周辺に存在する物体について、移動体を基準とした物体の相対位置を繰り返し観測する。相対位置取得部211は、周辺物体観測装置811が観測した観測結果を取得する。静止物体判定部220(停止物識別部)は、周辺物体観測装置811が相対位置を観測した物体が静止しているか否かを判定する。物体相関部230(停止物用追尾部)は、周辺物体観測装置811が観測した複数の相対位置のなかから、同一の物体について周辺物体観測装置811が観測した複数の相対位置を判定する。角速度推定部(状態推定部240、軌道推定部)は、移動体の角速度を推定する。
(もっと読む)
測距環境模擬装置
【課題】本発明は、飛しょう体や航空機等のプラットフォームに搭載され、かつFMCW方式が適用された測距装置の機能試験、あるいはその測距装置を含む系のシステム試験等に供される測距環境模擬装置に関し、測距装置の位置や姿勢の多様な形態に対して柔軟に追従し、測距装置の性能や機能の試験および評価を精度よく実現できることを目的とする。
【解決手段】FMCW方式の測距装置に到来する受信波に付帯するドップラ周波数を算出するドップラシフト算出手段と、前記測距装置によって送信された送信波に同期して、前記ドップラ周波数のドップラシフトとを模擬する周波数変換を前記送信波に施し、前記周波数変換の結果を前記受信波として前記測距装置に与える周波数シフト模擬手段とを備える。
(もっと読む)
レーダ装置
【課題】装置構成の複雑化や大規模化を招くことなく、目標の移動によるドップラ偏移がある場合にもレンジサイドローブの増大(劣化)の影響を低減するレーダ装置を得る。
【解決手段】レーダ装置は、相互相関処理の結果からピーク位置を検出するピーク検出器と、該ピーク位置の両側の第1サイドローブの位置を検出する第1サイドローブ検出器と、上記両側に検出された第1サイドローブの振幅値を比較するとともに振幅値の小さい上記第1サイドローブ側のデータを切り出す第1サイドローブ比較器と、アップチャープを送信したときに切り出した上記データとダウンチャープを送信したときに切り出した上記データを合成するデータ合成器と、データ合成後の振幅データから所定閾値以上の値を持つ位置を検出する信号検出器と、上記検出された位置を距離に変換する測距器と、を備えた。
(もっと読む)
FM−CWレーダ装置
【課題】ビット数の少ないAD変換器を用いて目標物を検出するFM−CWレーダ装置を得ること。
【解決手段】送信波と反射波との周波数差の信号であるビート信号の出力先を切り替えるアナログスイッチ12と、ビート信号に対して最も広い通過特性を持つバンドパスフィルタ13と、ビート信号に対して所望の周波数以下の帯域を減衰させる特性を持つバンドパスフィルタ14と、アナログスイッチ12がビート信号の出力先としたバンドパスフィルタを入力元とする接続の切り替えを行うアナログスイッチ15と、通過したバンドパスフィルタの特性に応じた利得でビート信号を増幅する利得制御増幅器16と、ビート信号を通過させるバンドパスフィルタを決定して各アナログスイッチへ通知し、さらに、当該バンドパスフィルタの特性に基づいて利得制御増幅器16の利得の大きさを決定する制御部17と、を備える。
(もっと読む)
車載レーダ装置
【課題】付着物検知手段で、レドームの付着物が検出された場合に、付着物が一時的にレドームに付着している状態か、定常的にレドームに付着している状態かを判別する車載レーダ装置を得る。
【解決手段】付着物検知手段16はレドーム6の付着物7による反射波の時間的変動を検出するレドーム反射変動検出部を備え、付着物検出手段16によりレドーム6の付着物7が検出された場合に、レドーム反射変動検出部により、レドーム6の付着物7による反射波の時間的変動が大きいときは、レドーム6に一時的に付着物7が付着したと判断し、レドーム6の付着物7による反射波の変動が小さいときは、レドーム6に定常的に付着物7が付着したと判断する。
(もっと読む)
車載用レーダ装置及び車載用レーダシステム
【課題】多周波変調異常を検出する機能を有する車載用レーダ装置を提供する。
【解決手段】2周波CW変調処理部101のように、送受信信号のIF信号に位相差が発生するような変調処理方式と、FM変調処理部102のように、送受信信号から得られるドップラ周波数がターゲット距離に応じて変動するような特性を持つ変調方式を有し、前記位相差から算出されるターゲット距離と、前記ドップラ周波数の変動量から算出されるターゲット距離の差分が所定値以上になった場合、多周波変調処理が異常であると判断することができる。
(もっと読む)
誘導装置
【課題】
HPRF(High Pulse Repetition Frequency)の電波にて目標を探知・追尾する従来の誘導装置においては、メインローブクラッタと目標のドップラ周波数が重なる領域(ビーム領域)では、メインローブクラッタと目標の区別がつかず、メインローブクラッタを誤検出する可能性があるため、あらかじめメインローブクラッタの周波数領域を算出し、その領域内は探知しないようにしているため、クラッタのレベルが低く、実際は目標を探知できる場合があったとしても、探知できないという課題がある。
【解決手段】
従来は受信部と局部発振部が1セットであったが、複数の受信部と局部発振部のセットを有することで、目標からの反射信号とクラッタを弁別することができ、ビーム領域の目標を探知することを可能にするものである。
(もっと読む)
目標検出装置
【課題】演算負荷の低減を図った上で移動目標の検出精度の向上を実現する目標検出装置を得る。
【解決手段】パルスヒット毎ビデオ信号を生成するパルス圧縮手段(1)と、パルスヒット毎ビデオ信号の1CPI分に対してコヒーレント積分を行い、レンジ−ドップラー周波数空間で構成された1CPI分のビデオ信号を生成するCPI毎コヒーレント積分手段(2)と、1CPI分のビデオ信号に基づいて、CPI間での検出セルの推移を探索し、推移履歴を生成する探索処理部(100)と、推移履歴に基づいて、パルスヒット毎のビデオ信号の各検出セルを初回パルスヒット時のセル位置へ補正し、補正後のパルスヒット毎のビデオ信号に対してパルスヒット方向にフルコヒーレント積分処理を行う積分処理部(200)と、積分処理後のビデオ信号に対して閾値処理を行うことで、移動目標の検出を行う閾値処理手段(4)とを備える。
(もっと読む)
101 - 120 / 647
[ Back to top ]